TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025068709
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2023178667
出願日
2023-10-17
発明の名称
駆動装置、および、パラレルリンクを含むロボット
出願人
日本精工株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
3/12 20060101AFI20250422BHJP(制御;調整)
要約
【課題】駆動装置においてデータ量を抑制するとともにねじ軸の位置精度を向上させること。
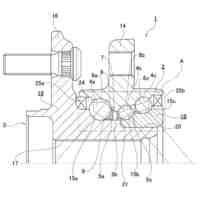
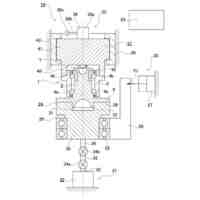
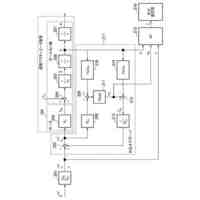
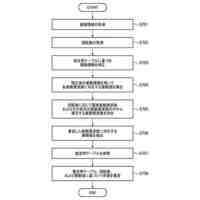
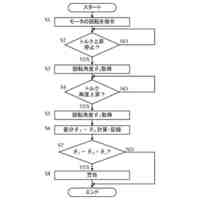
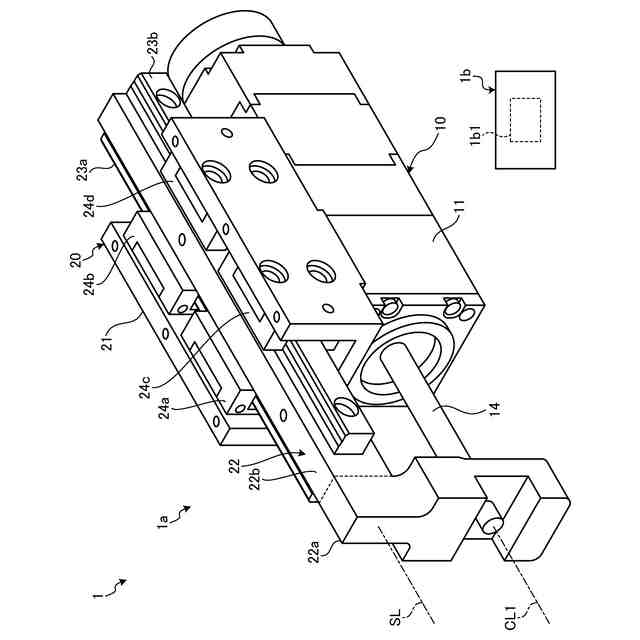
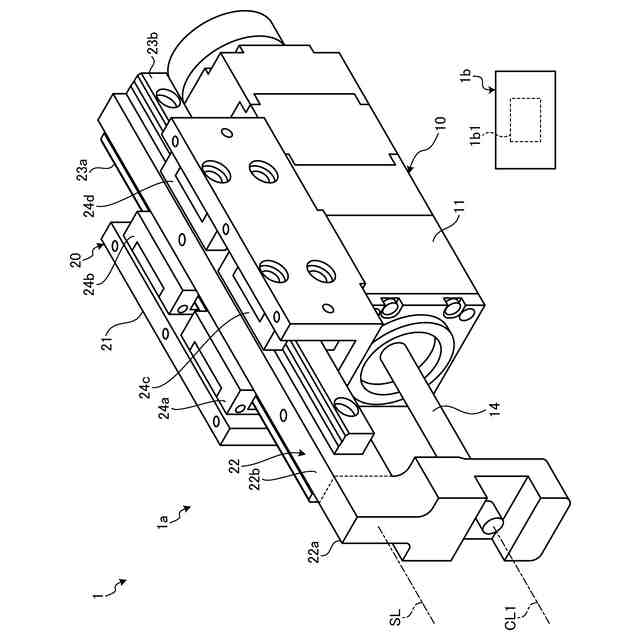
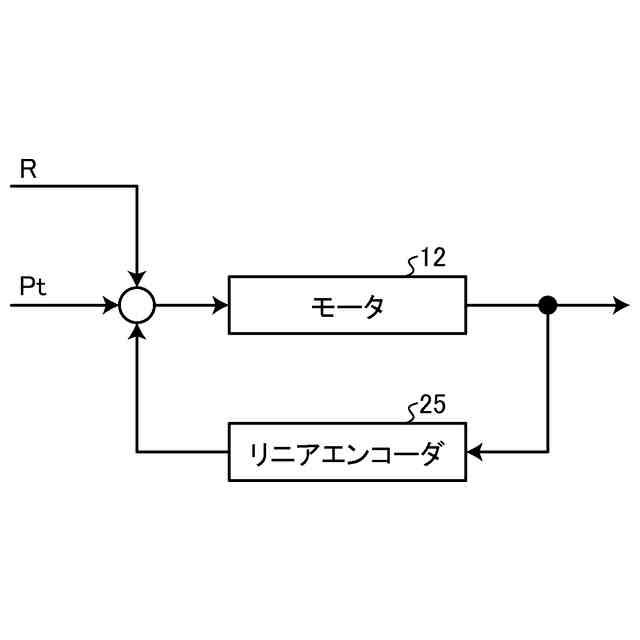
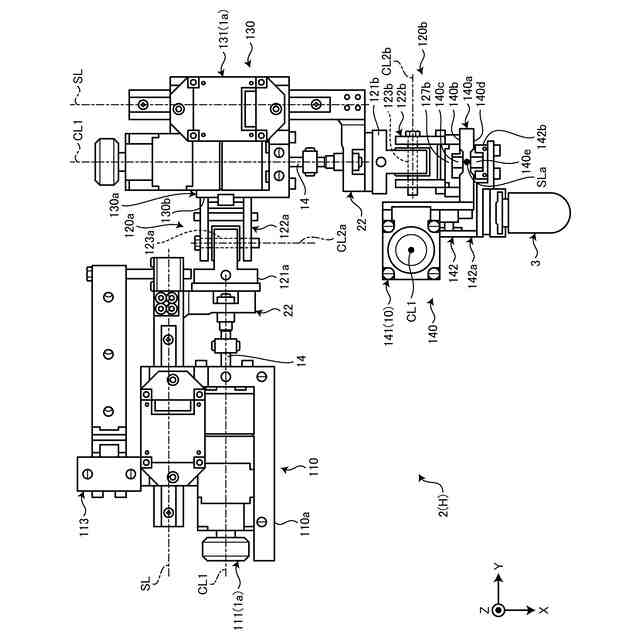
【解決手段】駆動装置1の制御装置1bは、モータ12の駆動によって移動するねじ軸14の目標位置に対応する補正値を用いて目標位置を補正し、リニアエンコーダ25の検出値に基づいてねじ軸14の現在位置を算出し、補正された目標位置と現在位置との偏差を小さくするように、モータ12の操作量を決定するフィードバック制御を行うとともに、補正値を、ねじ軸14のリード誤差を示す近似式を用いて算出する。
【選択図】図1
特許請求の範囲
【請求項1】
アクチュエータと、
前記アクチュエータを制御する制御装置と、を備え、
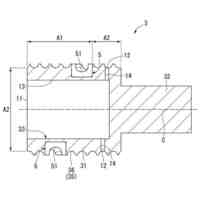
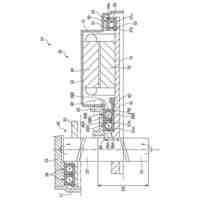
前記アクチュエータは、
ハウジングと、
前記ハウジングに収納されているナットと、
前記ナットを回転させるモータと、
前記ナットと嵌合し、前記ナットが回転することで前記ハウジングに対して移動するねじ軸と、
前記ねじ軸の移動量を検出するセンサと、を備え、
前記制御装置は、
前記ねじ軸の目標位置に対応する補正値を用いて前記目標位置を補正し、
前記センサの検出値に基づいて前記ねじ軸の現在位置を算出し、
補正された前記目標位置と算出された前記ねじ軸の現在位置との偏差を小さくするように、前記モータの操作量を決定するフィードバック制御を行うとともに、
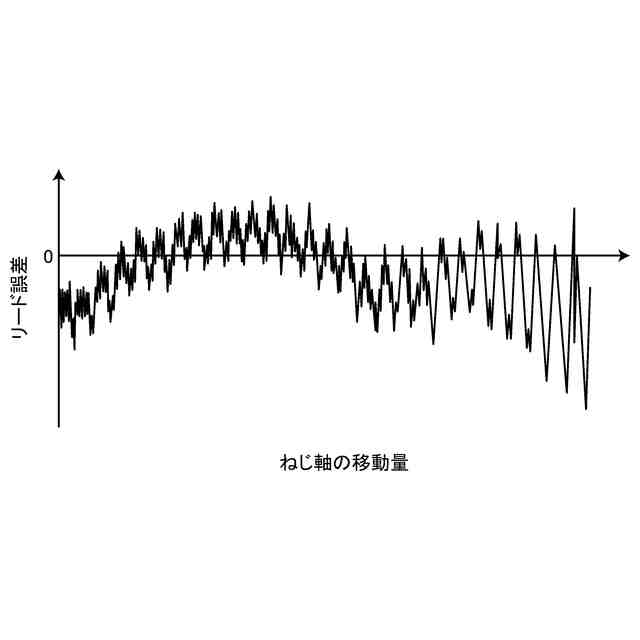
前記補正値を、前記ねじ軸のリード誤差を示す近似式を用いて算出する、
駆動装置。
続きを表示(約 680 文字)
【請求項2】
前記制御装置は、前記近似式に相当する下記式(1)を記憶する記憶部を有する、
請求項1に記載の駆動装置。
R=A×sin(α×θ)+Ka×L×cos(α×θ)
+B×cos(α×θ)+Kb×L×sin(α×θ) ・・・(1)
Rは前記補正値であり、αは、1から3のうちいずれか1つの整数であり、θは前記ねじ軸の位置に対応する前記ねじ軸の回転角度であり、Lは前記ねじ軸の位置に対応する前記ねじ軸の被支持位置から先端までの距離であり、A,Ka,B,Kbは前記ねじ軸のリード誤差とRとの差を最小とする実数である。
【請求項3】
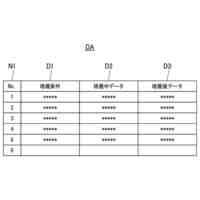
前記式(1)のα、A,Ka,B,Kbの値が格納されている格納部をさらに備える、
請求項2に記載の駆動装置。
【請求項4】
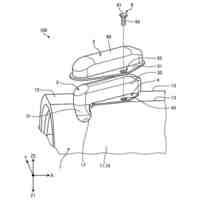
前記格納部は、前記式(1)のα、A,Ka,B,Kbの値が変換された二次元コードの画像を有する、
請求項3に記載の駆動装置。
【請求項5】
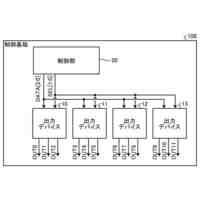
請求項2に記載の駆動装置が備える前記アクチュエータを複数備えるとともに、
前記式(1)を記憶する記憶部を有する制御部と、
複数の前記アクチュエータそれぞれに対応する前記式(1)のα、A,Ka,B,Kbの値が格納されている1つの格納部と、を備え、
複数の前記アクチュエータのうち1つの前記アクチュエータおよび他の1つの前記アクチュエータは、それぞれの基準軸線同士が互いに平行な状態で配置されている、
パラレルリンクを含むロボット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、駆動装置、および、パラレルリンクを含むロボットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に開示されている駆動装置は、補正部とアクチュエータと位置センサとを備え、アクチュエータは、可動部(ロッド)に接続されたナットと、ナットが螺合されるボールねじ軸(ねじ軸)と、ねじ軸を回転駆動するパルスモータとを有する。補正部は、予測可能な誤差を校正する位置補正量が可動部の位置毎にマッピングされた補正量マップを有する。指令信号により可動部が移動する理想移動位置を推定し、補正量マップを参照して位置センサが検出した現在位置に対応する位置補正量を求める。そして、現在位置を位置補正量で補正した補正現在位置と、理想移動位置との差が小さくなるように指令信号を補正した補正信号を生成する。これにより、ロッドの位置精度を向上させることができる。
【0003】
また、特許文献1には、上記の駆動装置を複数備えるパラレルリンクを含むロボットが開示されている。また、特許文献1に開示されているように、ロッドは、ナットが回転することで移動するねじ軸でもよい。この場合、補正部によって、ねじ軸の位置精度を向上させることができる。
【先行技術文献】
【特許文献】
【0004】
特許第7088440号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
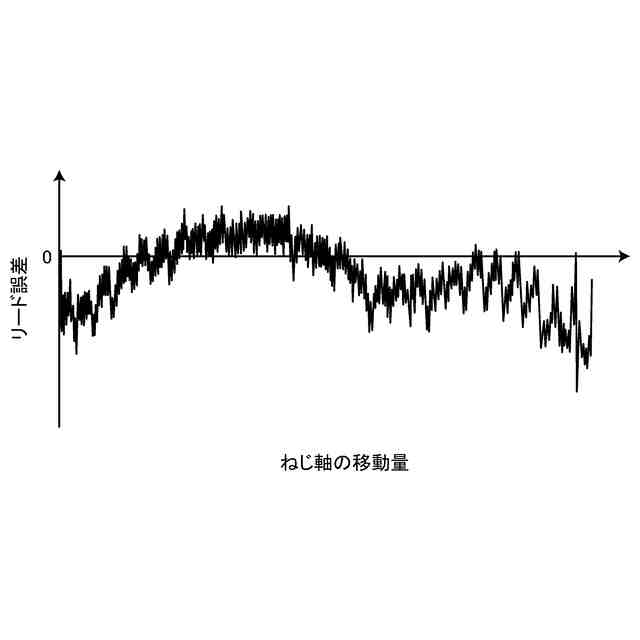
しかしながら、補正部が有する補正量マップは、リード誤差などを校正する位置補正量がロッド(またはねじ軸)の位置毎にマッピングされており、データ量が膨大な量となる。また、駆動装置を複数備えるパラレルリンクを含むロボットにおいては、駆動装置の個数に比例して当該データ量がさらに多くなる。
【0006】
本開示の態様は、データ量を抑制するとともにねじ軸の位置精度を向上させる駆動装置およびパラレルリンクを含むロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の態様において、駆動装置は、アクチュエータと、前記アクチュエータを制御する制御装置と、を備え、前記アクチュエータは、ハウジングと、前記ハウジングに収納されているナットと、前記ナットを回転させるモータと、前記ナットと嵌合し、前記ナットが回転することで前記ハウジングに対して移動するねじ軸と、前記ねじ軸の移動量を検出するセンサと、を備え、前記制御装置は、前記ねじ軸の目標位置に対応する補正値を用いて前記目標位置を補正し、前記センサの検出値に基づいて前記ねじ軸の現在位置を算出し、補正された前記目標位置と算出された前記ねじ軸の現在位置との偏差を小さくするように、前記モータの操作量を決定するフィードバック制御を行うとともに、前記補正値を、前記ねじ軸のリード誤差を示す近似式を用いて算出する。
【0008】
本開示の態様によれば、駆動装置は、ねじ軸の目標位置を補正する補正値を算出することで、ねじ軸の位置毎にリード誤差の値が記憶部に記憶されている場合と比べてデータ量を抑制することができる。また、補正値に基づいて目標位置が補正されることでねじ軸の位置精度を向上させることができる。
【0009】
また、本開示の態様において、前記制御装置は、前記近似式に相当する下記式(1)を記憶する記憶部を有する。
R=A×sin(α×θ)+Ka×L×cos(α×θ)
+B×cos(α×θ)+Kb×L×sin(α×θ) ・・・(1)
Rは前記補正値であり、αは、1から3のうちいずれか1つの整数であり、θは前記ねじ軸の位置に対応する前記ねじ軸の回転角度であり、Lは前記ねじ軸の位置に対応する前記ねじ軸の被支持位置から先端までの距離であり、A,Ka,B,Kbは前記ねじ軸のリード誤差とRとの差を最小とする実数である。
【0010】
本開示の態様によれば、式(1)に基づいて目標位置が補正されることでねじ軸の位置精度を確実に向上させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精工株式会社
ボールねじ
1か月前
日本精工株式会社
信号出力回路
16日前
日本精工株式会社
回転機械装置
今日
日本精工株式会社
ボールねじ装置
14日前
日本精工株式会社
ハブユニット軸受
14日前
日本精工株式会社
磁歪式トルクセンサ
28日前
日本精工株式会社
保持器及び転がり軸受
1日前
日本精工株式会社
センサ付ハブユニット軸受
27日前
日本精工株式会社
玉軸受用冠型保持器、及び玉軸受
27日前
日本精工株式会社
ハブユニット軸受の予圧測定方法
24日前
日本精工株式会社
ハブユニット軸受の外輪の製造方法
7日前
日本精工株式会社
実験支援システムおよび情報取得方法
今日
日本精工株式会社
転がり軸受用冠形保持器、及び転がり軸受
7日前
日本精工株式会社
異常診断装置、異常診断方法およびプログラム
21日前
日本精工株式会社
アクチュエータ装置の制御装置、および制御方法
21日前
日本精工株式会社
表面処理を施された部品及び部品の製造組立方法
今日
日本精工株式会社
玉軸受、及び、玉軸受におけるグリースの塗布方法
27日前
日本精工株式会社
駆動装置、および、パラレルリンクを含むロボット
1日前
日本精工株式会社
転がり軸受の荷重推定装置、荷重推定方法、およびプログラム
7日前
日本精工株式会社
機械部品の製造方法、軸受の製造方法、機械部品、軸受、機械、及び車両
15日前
日本精工株式会社
検出装置付きハブユニット軸受及び検出装置付きハブユニット軸受システム
7日前
日本精工株式会社
検出装置付きハブユニット軸受及び検出装置付きハブユニット軸受システム
7日前
日本精工株式会社
歯車装置、直動アクチュエータ、バックラッシ角度測定方法およびプログラム
22日前
日本精工株式会社
パラレルリンクを含むロボット、および、パラレルリンクを含むロボットの製造方法
29日前
日本精工株式会社
筒状部材の製造方法、機械装置の製造方法、及び車両の製造方法
14日前
日本精工株式会社
筒状部材の製造方法、機械装置の製造方法、および車両の製造方法
14日前
エイブリック株式会社
基準電圧回路
21日前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
24日前
スター精密株式会社
工作機械
1か月前
ローム株式会社
半導体集積回路
29日前
株式会社ダイフク
搬送車
24日前
エイブリック株式会社
ボルテージレギュレータ
21日前
株式会社シンテックホズミ
搬送ロボット
2か月前
トヨタ自動車株式会社
工作機械の制御装置
23日前
トヨタ自動車株式会社
工作機械の制御装置
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ