TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025065872
公報種別
公開特許公報(A)
公開日
2025-04-22
出願番号
2023175370
出願日
2023-10-10
発明の名称
目標経路設定システム、目標経路設定プログラム、および、目標経路設定方法
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/20 20060101AFI20250415BHJP(水工;基礎;土砂の移送)
要約
【課題】アタッチメントと周囲物との干渉を抑制可能な目標経路を、自動的に設定する。
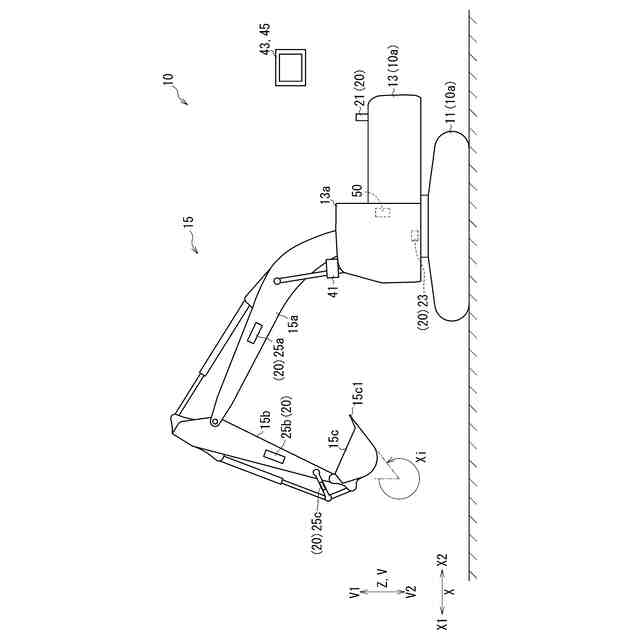
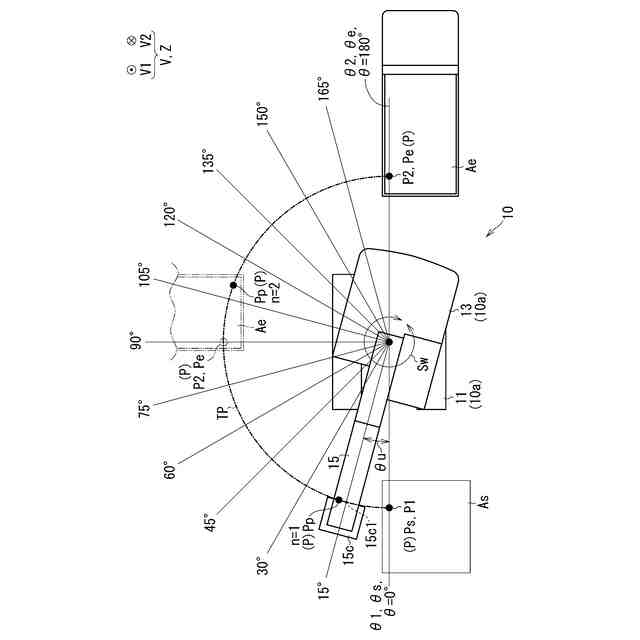
【解決手段】目標経路設定システム1は、周囲物情報取得部53と、設定部55と、を備える。周囲物情報取得部53は、上部旋回体13の周囲にある周囲物Sの情報を取得する。設定部55は、アタッチメント15の特定部位15c1の目標経路TP上の目標点Pを設定する。設定部55は、下部本体11に対する上部旋回体13の旋回方向Swおよび高さ方向Vの一方または両方の方向に、周囲物Sから離れる向きに、所定のオフセット量Oだけ周囲物Sからオフセットさせた位置を、目標点Pとして設定する。
【選択図】図4
特許請求の範囲
【請求項1】
下部本体と、
前記下部本体に対して旋回可能である上部旋回体と、
前記上部旋回体に取り付けられるアタッチメントと、
を備える作業機械に用いられる目標経路設定システムであって、
前記上部旋回体の周囲にある周囲物の情報を取得する周囲物情報取得部と、
前記アタッチメントの特定部位の目標経路上の目標点を設定する設定部と、
を備え、
前記設定部は、前記下部本体に対する前記上部旋回体の旋回方向および高さ方向の一方または両方の方向に、前記周囲物から離れる向きに、所定のオフセット量だけ前記周囲物からオフセットさせた位置を、前記目標点として設定する、
目標経路設定システム。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の目標経路設定システムであって、
前記アタッチメントは、作業を行う先端アタッチメントを備え、
前記特定部位は、前記先端アタッチメントの特定の部位に設定され、
前記設定部は、前記先端アタッチメントの大きさに応じて前記オフセット量を変える、
目標経路設定システム。
【請求項3】
請求項2に記載の目標経路設定システムであって、
前記設定部は、作業中の前記先端アタッチメントの前記高さ方向における寸法に応じて、前記高さ方向の前記オフセット量を変える、
目標経路設定システム。
【請求項4】
請求項2に記載の目標経路設定システムであって、
前記設定部は、作業中の前記先端アタッチメントの前記旋回方向における寸法に応じて、前記旋回方向の前記オフセット量を変える、
目標経路設定システム。
【請求項5】
請求項1に記載の目標経路設定システムであって、
前記設定部は、
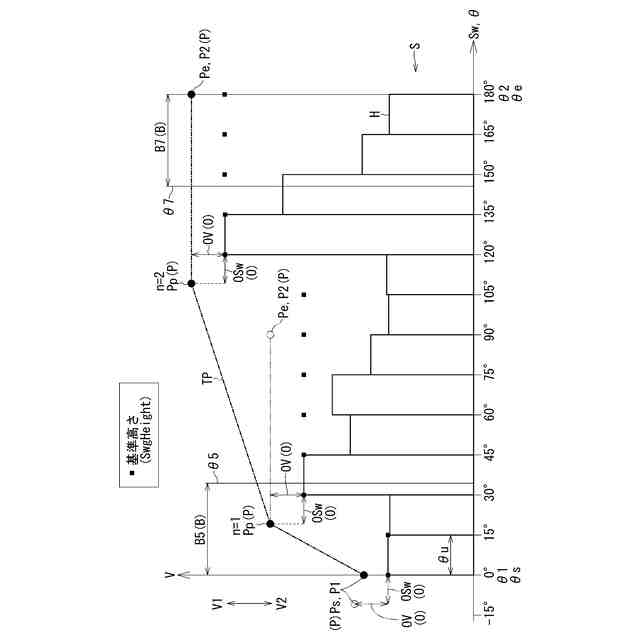
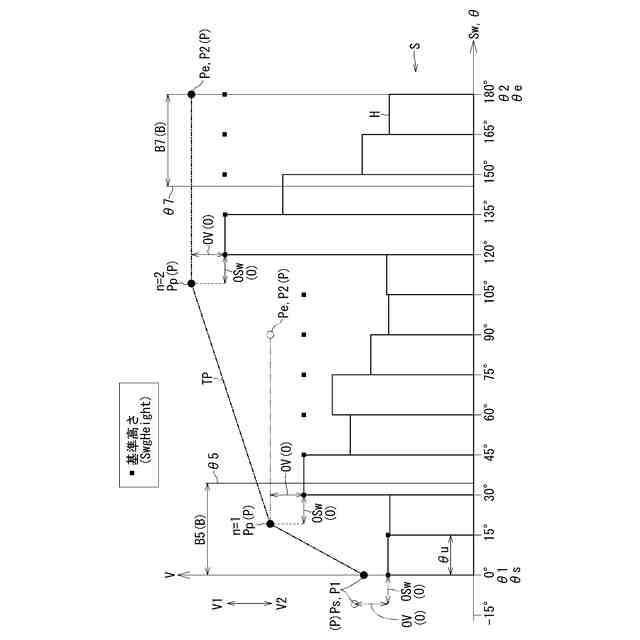
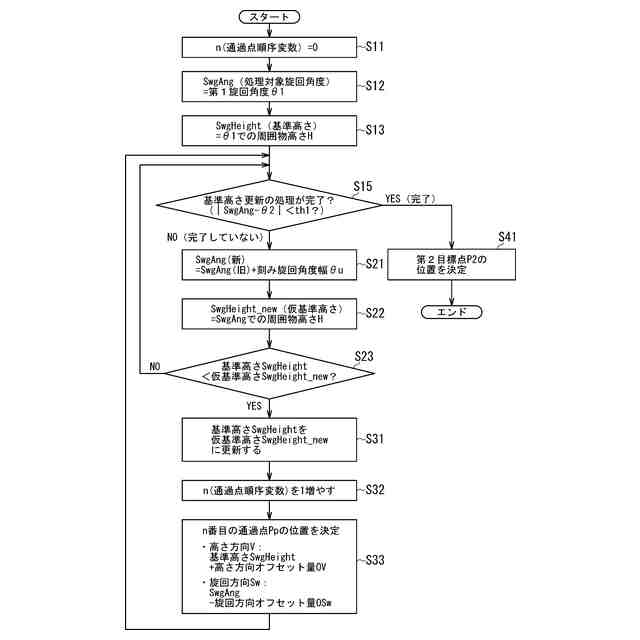
前記旋回方向における第1旋回角度から第2旋回角度に向かって、複数の旋回角度ごとに、基準高さと前記周囲物の高さとを比較し、
前記基準高さよりも前記周囲物の高さの方が高い場合に、前記周囲物の高さに基づいて前記基準高さを更新し、
更新された前記基準高さと、更新された前記基準高さに対応する旋回角度と、により示される前記周囲物の位置から前記オフセットさせた位置を、前記目標点として設定する、
目標経路設定システム。
【請求項6】
請求項5に記載の目標経路設定システムであって、
前記設定部は、
前記第2旋回角度から前記第1旋回角度に向かって、複数の旋回角度ごとに、第2基準高さと前記周囲物の高さとを比較し、
前記第2基準高さよりも前記周囲物の高さの方が高い場合に、前記周囲物の高さに基づいて前記第2基準高さを更新し、
更新された前記第2基準高さと、更新された前記第2基準高さに対応する旋回角度と、により示される前記周囲物の位置から前記オフセットさせた位置を、前記目標点として設定する、
目標経路設定システム。
【請求項7】
請求項1に記載の目標経路設定システムであって、
前記設定部は、
前記目標点の候補となる候補点を設定し、
前記目標経路における両端とは異なる位置の前記候補点の少なくとも一部を判定対象候補点とし、
前記判定対象候補点の前後の前記候補点どうしをつないだ線分を判定線とし、
前記判定対象候補点の旋回角度において、前記判定線が前記判定対象候補点よりも低い場合、前記判定対象候補点を前記目標点として設定し、
前記判定対象候補点の旋回角度において、前記判定線が前記判定対象候補点よりも高い場合、前記判定対象候補点を前記目標点として設定しない、
目標経路設定システム。
【請求項8】
請求項1に記載の目標経路設定システムであって、
前記設定部は、
前記旋回方向の旋回角度の増加量に対する前記目標経路の高さの増加量を前記目標経路の傾きとしたとき、旋回角度が増加するにしたがって、前記目標経路の傾きが徐々に小さくなるように、前記目標点を設定する、
目標経路設定システム。
【請求項9】
請求項1に記載の目標経路設定システムであって、
前記設定部は、複数の前記目標点を通る滑らかな曲線を前記目標経路とする、
目標経路設定システム。
【請求項10】
請求項1に記載の目標経路設定システムであって、
前記設定部は、
前記下部本体に対して前記上部旋回体が加減速を行う領域であって前記旋回方向における領域である加減速領域を設定し、
前記加減速領域での前記特定部位の加減速度が、前記設定部に設定された加減速度範囲に収まるように、前記特定部位の加減速度を制限する、
目標経路設定システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に用いられる目標経路設定システム、目標経路設定プログラム、および、目標経路設定方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
例えば特許文献1に、作業者の手動操作(ティーチングなど)により、作業機械のアタッチメントの目標経路を設定する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2022/049987号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、作業者が手動操作で目標経路を設定する作業には手間がかかる。また、アタッチメントと周囲物との干渉を抑制可能な目標経路を設定できることが望まれる。
【0005】
そこで、本発明は、アタッチメントと周囲物との干渉を抑制可能な目標経路を、自動的に設定することができる、目標経路生成システム、目標経路設定プログラム、および、目標経路設定方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
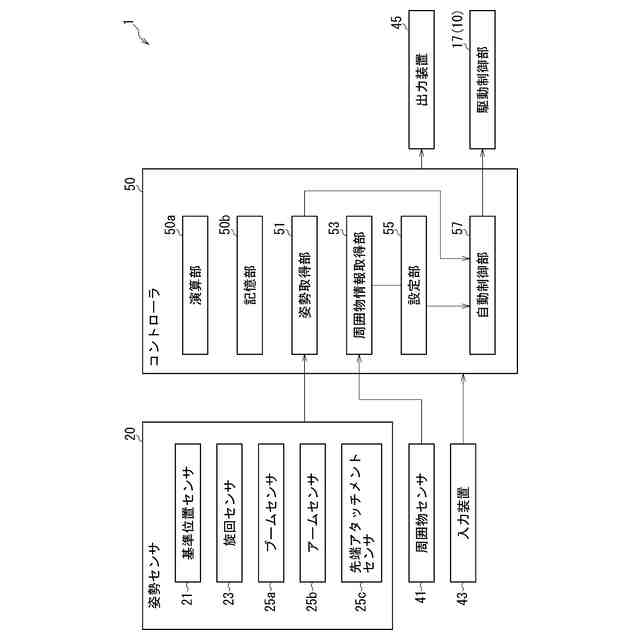
目標経路設定システムは、作業機械に用いられる。前記作業機械は、下部本体と、上部旋回体と、アタッチメントと、を備える。前記上部旋回体は、前記下部本体に対して旋回可能である。前記アタッチメントは、前記上部旋回体に取り付けられる。目標経路設定システムは、周囲物情報取得部と、設定部と、を備える。前記周囲物情報取得部は、前記上部旋回体の周囲にある周囲物の情報を取得する。前記設定部は、前記アタッチメントの特定部位の目標経路上の目標点を設定する。前記設定部は、前記下部本体に対する前記上部旋回体の旋回方向および高さ方向の一方または両方の方向に、前記周囲物から離れる向きに、所定のオフセット量だけ前記周囲物からオフセットさせた位置を、前記目標点として設定する。
【0007】
目標経路設定プログラムは、作業機械に用いられる。前記作業機械は、下部本体と、上部旋回体と、アタッチメントと、を備える。前記上部旋回体は、前記下部本体に対して旋回可能である。前記アタッチメントは、前記上部旋回体に取り付けられる。目標経路設定プログラムは、周囲物情報取得ステップと、設定ステップと、をコンピュータに実行させる。前記周囲物情報取得ステップは、前記上部旋回体の周囲にある周囲物の情報を取得する。前記設定ステップは、前記アタッチメントの特定部位の目標経路上の目標点を設定する。前記設定ステップは、前記下部本体に対する前記上部旋回体の旋回方向および高さ方向の一方または両方の方向に、前記周囲物から離れる向きに、所定のオフセット量だけ前記周囲物からオフセットさせた位置を、前記目標点として設定する。
【0008】
目標経路設定方法は、作業機械に用いられる。前記作業機械は、下部本体と、上部旋回体と、アタッチメントと、を備える。前記上部旋回体は、前記下部本体に対して旋回可能である。前記アタッチメントは、前記上部旋回体に取り付けられる。目標経路設定方法は、周囲物情報取得ステップと、設定ステップと、を備える。前記周囲物情報取得ステップは、前記上部旋回体の周囲にある周囲物の情報を取得する。前記設定ステップは、前記アタッチメントの特定部位の目標経路上の目標点を設定する。前記設定ステップは、前記下部本体に対する前記上部旋回体の旋回方向および高さ方向の一方または両方の方向に、前記周囲物から離れる向きに、所定のオフセット量だけ前記周囲物からオフセットさせた位置を、前記目標点として設定する。
【発明の効果】
【0009】
上記の目標経路生成システム、目標経路設定プログラム、および、目標経路設定方法のそれぞれにより、アタッチメントと周囲物との干渉を抑制できる目標経路を、自動的に設定することができる。
【図面の簡単な説明】
【0010】
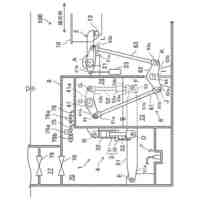
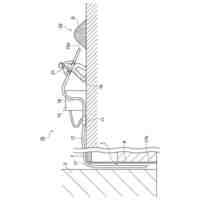
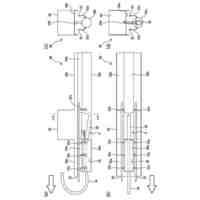
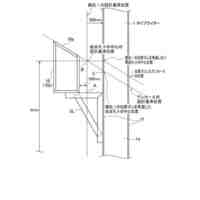
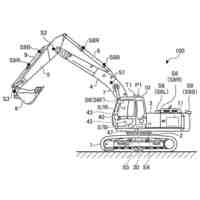
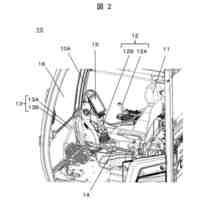
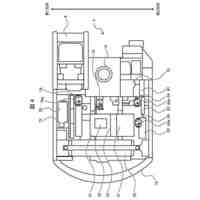
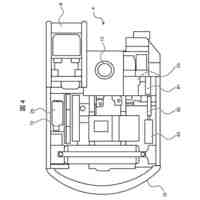
目標経路設定システム1が用いられる作業機械10を横から見た図である。
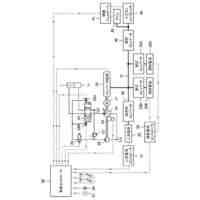
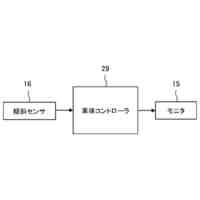
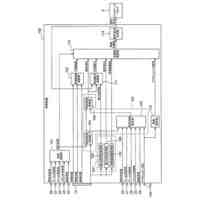
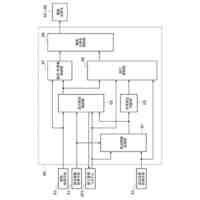
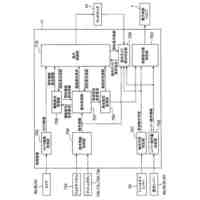
目標経路設定システム1のブロック図である。
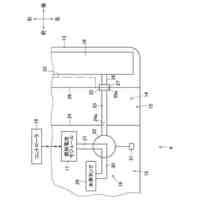
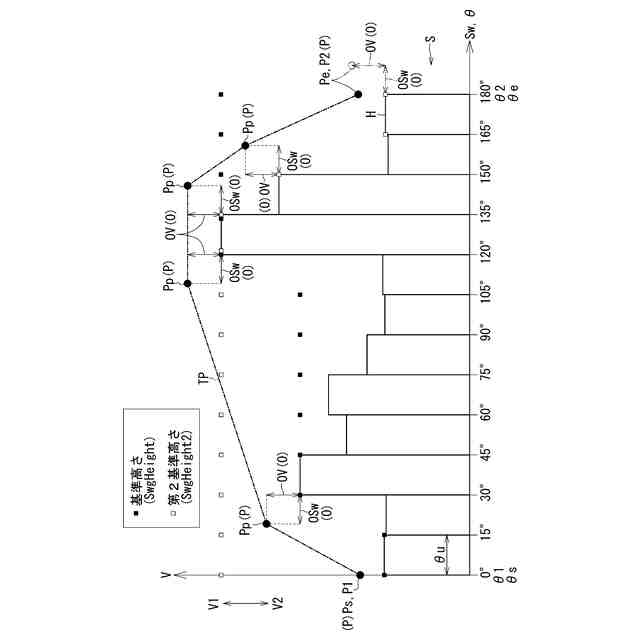
図1に示す作業機械10、および目標経路TPなどを上から見た図である。
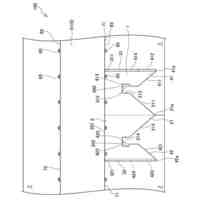
図3に示す目標経路TPの、旋回方向Swおよび高さ方向Vにおける位置を示す図である。
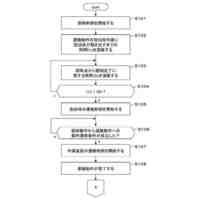
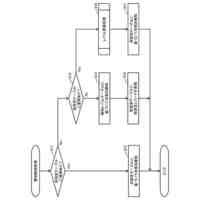
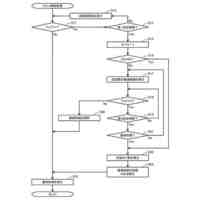
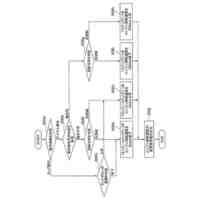
図2に示す設定部55の処理のフローチャートである。
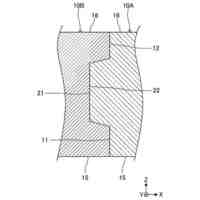
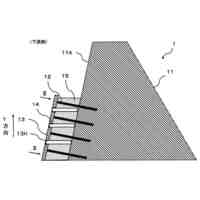
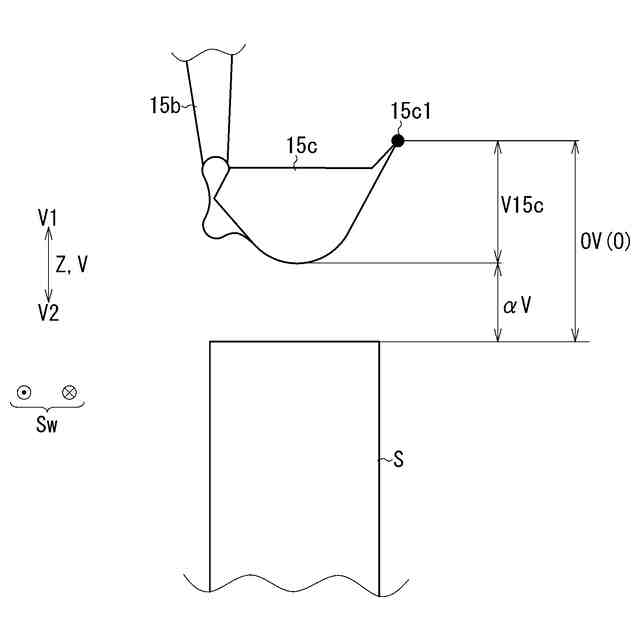
図4に示す高さ方向オフセット量OVを示す図である。
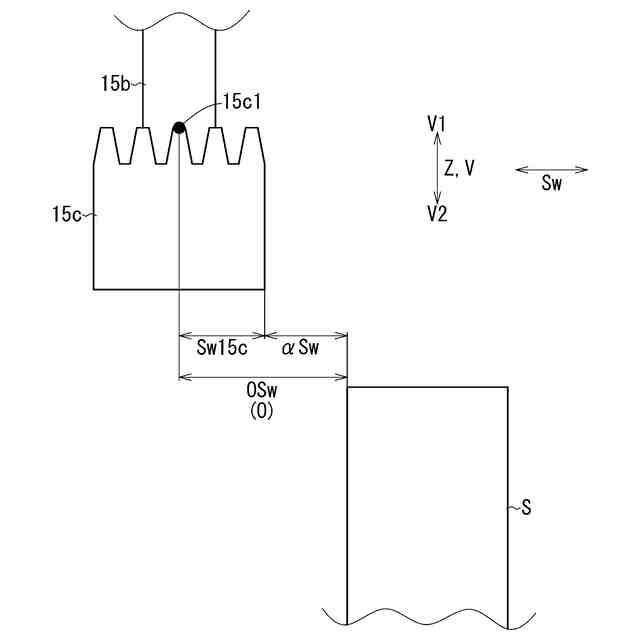
図4に示す旋回方向オフセット量OSwを示す図である。
変形例4の図4相当図である。
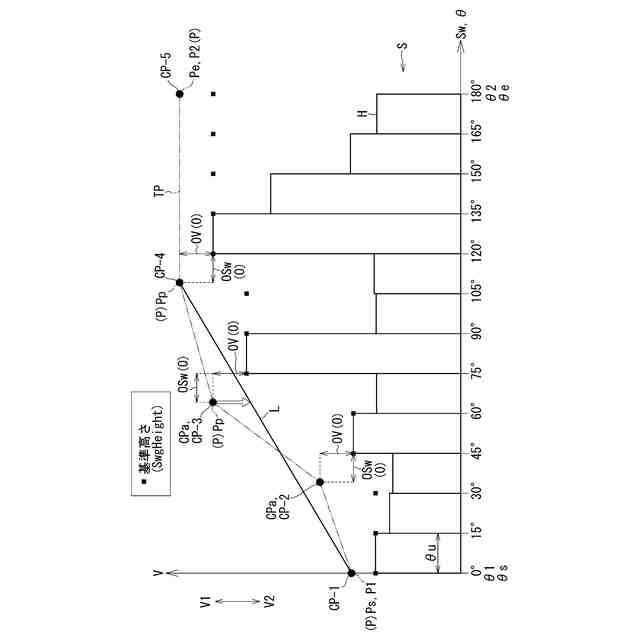
変形例6の図4相当図であり、判定線Lが判定対象候補点CPaよりも低い場合の例を示す図である。
変形例6の図4相当図であり、判定線Lが判定対象候補点CPaよりも高い場合の例を示す図である。
変形例8の図4相当図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
長尺平板パネル
10日前
個人
構造物の検査方法
11日前
株式会社東部
多翼型鋼管杭
13日前
個人
津波防御三段壁浮上システム。
3日前
株式会社大林組
基礎構造
17日前
カナデビア株式会社
起伏ゲート
11日前
日本車輌製造株式会社
杭打機
13日前
株式会社クボタ
作業機
17日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
建設機械
17日前
日立建機株式会社
作業機械
19日前
カナデビア株式会社
浮体構造体
3日前
鹿島建設株式会社
埋戻し方法
3日前
カナデビア株式会社
係留装置及びその制御方法
11日前
構法開発株式会社
埋込継手構造
10日前
日立建機株式会社
建設機械
19日前
株式会社クボタ
フロントローダ及び作業車両
10日前
末広産業株式会社
水路用型枠ユニット
18日前
株式会社SEELS
フェンダー用カバー部材
4日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
13日前
株式会社熊谷組
山留めアンカーの位置測量方法
19日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
建設機械
17日前
株式会社エンバイン
連結具及び盛土構造
3日前
日立建機株式会社
作業機械
18日前
株式会社本久
砂防堰堤構造及び砂防堰堤構築方法
17日前
住友建機株式会社
ショベル、ショベルの制御装置
18日前
株式会社日立建機ティエラ
建設機械
18日前
東電設計株式会社
鉄塔基礎構造
17日前
東京コンテック株式会社
地盤復旧オーガー及び地盤復旧方法
10日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ