TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025064996
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2024163485
出願日
2024-09-20
発明の名称
視覚ベースのシステムのための生成的人工知能ベースの合成データ生成
出願人
タタ コンサルタンシー サービシズ リミテッド
,
TATA Consultancy Services Limited
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G06V
10/774 20220101AFI20250410BHJP(計算;計数)
要約
【課題】現実的なデータは、視覚ベースのシステムの訓練のための重要な要素である。従来のアプローチは、このようなデータを生成するために複雑な要件を必要とし、また非常に高価である。本開示は、異なる人工知能レンダリング、シナリオ生成、及び未来の映像予測に対するワンストップソリューションを提供する。
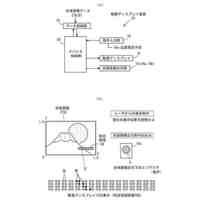
【解決手段】本開示は、生成的人工知能(GenAI)、深層学習、及び画像処理技術の融合のための規定を提供し、シミュレートされた、現実の又は通合された環境からデータを生成する可能性を探求する。さらに、本開示は、パノプティックセグメンテーションアプローチを利用してセマンティックラベルを作成し、連続するフレームからキューを取得するフローマップベースの方法論は、生成されるデータにおいて重要な問題である長時間の時間的コヒーレンスに対処するのに役立つ。これは、動的オブジェクト、場面変化、及び環境変異の様態に基づいて、合成データセットを生成する生成的AIネットワークへの入力となる。
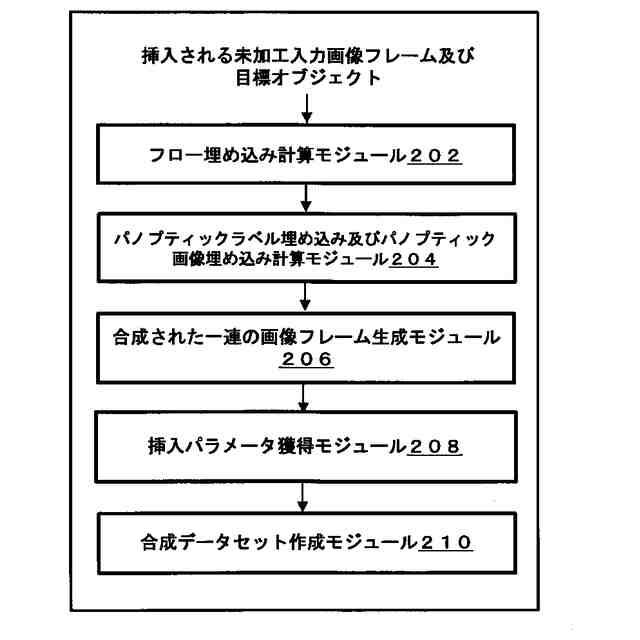
【選択図】図2
特許請求の範囲
【請求項1】
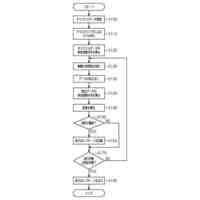
プロセッサ実装方法(300)であって、
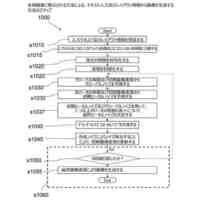
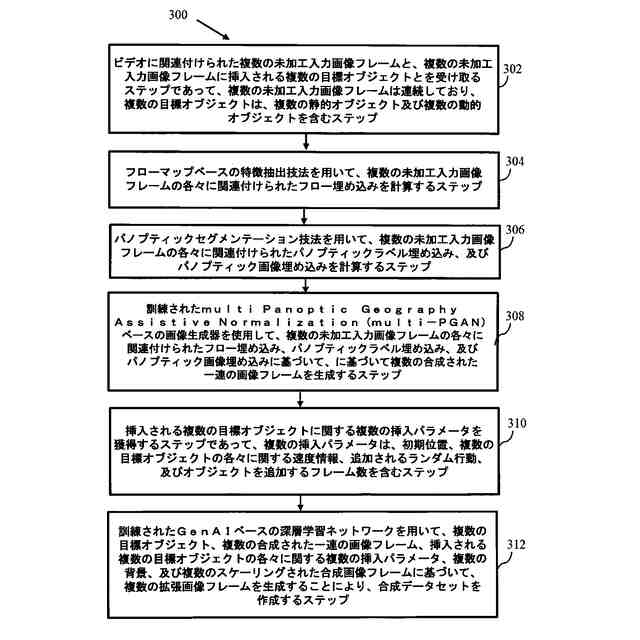
1又は複数のハードウェアプロセッサによって、ビデオに関連付けられた複数の未加工入力画像フレームと、前記複数の未加工入力画像フレームに挿入される複数の目標オブジェクトを受け取るステップ(302)であって、前記複数の未加工入力画像フレームは連続しており、前記複数の目標オブジェクトは、複数の静的オブジェクト及び複数の動的オブジェクトを含む、ステップ(302)と、
前記1又は複数のハードウェアプロセッサによって、フローマップベースの特徴抽出技法を使用して、前記複数の未加工入力画像フレームの各々に関連付けられたフロー埋め込みを計算するステップ(304)と、
前記1又は複数のハードウェアプロセッサによって、パノプティックセグメンテーション技法を用いて、前記複数の未加工入力画像フレームの各々に関連付けられた、パノプティックラベル埋め込み及びパノプティック画像埋め込みを計算するステップ(306)と、
前記1又は複数のハードウェアプロセッサによって、訓練されたmulti Panoptic Geography Assistive Normalization(multi-PGAN)ベースの画像生成器を用いて、前記複数の未加工入力画像フレームの各々に関連付けられた前記フロー埋め込み、前記パノプティックラベル埋め込み、及び前記パノプティック画像埋め込みに基づいて、複数の合成された一連の画像フレームを生成するステップ(308)と、
前記1又は複数のハードウェアプロセッサによって、挿入される前記複数の目標オブジェクトの各々に関連する複数の挿入パラメータを獲得するステップ(310)であって、前記複数の挿入パラメータは、初期位置、前記複数の目標オブジェクトの各々に関連する速度情報、追加されるランダム行動、及びオブジェクトを追加するフレーム数を含む、ステップと(310)、
前記1又は複数のハードウェアプロセッサによって、訓練されたGenAIベースの深層学習ネットワークを用いて、前記複数の目標オブジェクト、前記複数の合成された一連の画像フレーム、挿入される前記複数の目標オブジェクトの各々に関連する前記複数の挿入パラメータ、複数の背景、及び複数のスケーリングされた合成画像フレームに基づいて、複数の拡張画像フレームを生成することにより、複数の合成データセットを作成するステップ(312)と、
を含む、プロセッサ実装方法(310)。
続きを表示(約 4,300 文字)
【請求項2】
フローマップベースの特徴抽出技法を用いて、前記複数の未加工入力画像フレームの各々に関連付けられた前記フロー埋め込みを抽出するステップは、
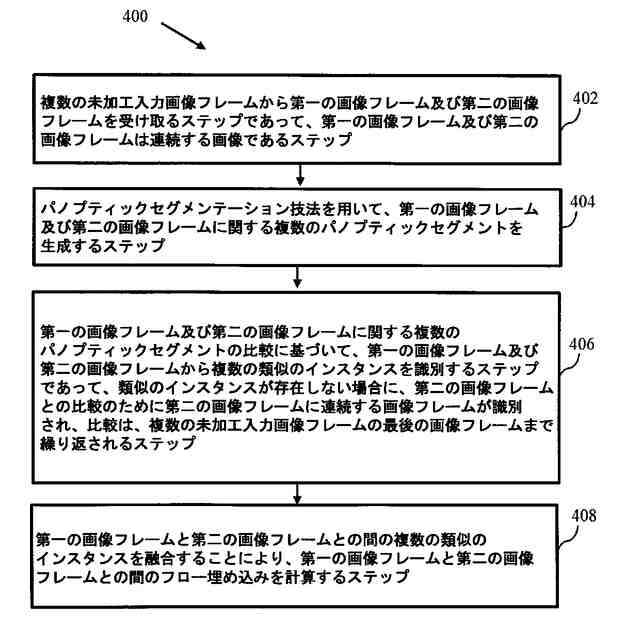
前記複数の未加工入力画像フレームから、第一の画像フレーム及び第二の画像フレームを受け取るステップ(402)であって、前記第一の画像フレーム及び前記第二の画像フレームは、連続する画像であるステップ(402)と、
前記パノプティックセグメンテーション技法を用いて、前記第一の画像フレーム及び前記第二の画像フレームに関連する複数のパノプティックセグメントを生成するステップ(404)と、
前記第一の画像フレーム及び前記第二の画像フレームに関連する前記複数のパノプティックセグメントの間の比較に基づいて、前記第一の画像フレーム及び前記第二の画像フレームから、複数の類似のインスタンスを識別するステップ(406)であって、類似のインスタンスが存在しない場合に、前記第二の画像フレームとの比較のために、前記第二の画像フレームに連続する画像フレームが識別され、前記比較は、前記複数の未加工入力画像フレームのうちの最後の画像フレームが比較されるまで繰り返される、ステップ(406)と、
前記第一の画像フレーム及び前記第二の画像フレームの間の前記複数の類似のインスタンスを融合することによって、前記第一の画像フレーム及び前記第二の画像フレームの間の前記フロー埋め込みを計算するステップ(408)と、
を含む、請求項1に記載の方法。
【請求項3】
前記複数の拡張画像は、Fr‘echet Inception Distance(FID)、Kanade-Lucas-Tomasi(KLT)スコア、及びパノプティックスコアを用いて評価される、請求項1に記載の方法。
【請求項4】
前記複数の目標オブジェクトの各々に関連する前記速度情報は、(a)増速値、(b)減速値、及び(c)定速値のいずれかである、請求項1に記載の方法。
【請求項5】
プログラムされた命令を格納する少なくとも1つのメモリ(104)、1又は複数の入力/出力(I/O)インターフェイス(112)、及び前記1又は複数のメモリに動作可能に結合された1又は複数のハードウェアプロセッサ(102)
を含むシステム(100)であって、前記1又は複数のハードウェアプロセッサ(102)は、
ビデオに関連付けられた複数の未加工入力画像フレーム、及び前記複数の未加工入力画像フレームに挿入される複数の目標オブジェクトを受け取るステップであって、前記複数の未加工入力画像フレームは連続しており、前記複数の目標オブジェクトは、複数の静的オブジェクト及び複数の動的オブジェクトを含む、ステップと、
フローマップベースの特徴抽出技法を用いて、前記複数の未加工入力画像フレームに関連付けられたフロー埋め込みを計算するステップと、
パノプティックセグメンテーション技法を用いて、前記複数の未加工入力画像フレームの各々に関連付けられたパノプティックラベル埋め込み、及びパノプティック画像埋め込みを計算するステップと、
訓練されたmulti Panoptic Geography Assistive Normalization(multi-PGAN)ベースの画像生成器を用いて、前記複数の未加工入力画像フレームの各々に関連付けられた前記フロー埋め込み、前記パノプティックラベル埋め込み、及び前記パノプティック画像埋め込みに基づいて、複数の合成された一連の画像フレームを生成するステップと、
挿入される前記複数の目標オブジェクトに関連する複数の挿入パラメータを獲得するステップであって、前記複数の挿入パラメータは、初期位置、前記複数の目標オブジェクトの各々に関連する速度情報、追加されるランダム行動、及びオブジェクトに追加するフレーム数を含む、ステップと、
訓練されたGenAIベースの深層学習ネットワークを用いて、前記複数の目標オブジェクト、前記複数の合成された一連の画像フレーム、挿入される前記複数の目標オブジェクトの各々に関連する前記複数の挿入パラメータ、複数の背景、及び複数のスケーリングされた合成画像フレームに基づいて、複数の拡張画像フレームを生成することによって、合成データセットを作成するステップと、
を実行するようにプログラムされた命令によって構成される、システム。
【請求項6】
フローマップベースの特徴抽出器を用いて、前記複数の未加工入力画像フレームの各々に関連付けられた前記フロー埋め込みを抽出するステップは、
前記複数の未加工入力画像フレームから、第一の画像フレーム及び第二の画像フレームを受け取るステップであって、前記第一の画像フレーム及び前記第二の画像フレームは、連続する画像であるステップと、
前記パノプティックセグメンテーション技法を用いて、前記第一の画像フレーム及び前記第二の画像フレームに関連する複数のパノプティックセグメントを生成するステップと、
前記第一の画像フレーム及び前記第二の画像フレームに関連する前記複数のパノプティックセグメントの間の比較に基づいて、前記第一の画像フレーム及び前記第二の画像フレームから、複数の類似のインスタンスを識別するステップであって、類似のインスタンスが存在しない場合に、前記第二の画像フレームとの比較のために、前記第二の画像フレームに連続する画像フレームが識別され、前記比較は、前記複数の未加工入力画像フレームのうちの最後の画像フレームが比較されるまで繰り返されるステップと、
前記第一の画像フレーム及び前記第二の画像フレームの間の前記複数の類似のインスタンスを融合することによって、前記第一の画像フレーム及び前記第二の画像フレームの間の前記フロー埋め込みを計算するステップと、
を含む、請求項5に記載のシステム。
【請求項7】
前記複数の拡張画像は、Fr‘echet Inception Distance(FID)、Kanade-Lucas-Tomasi(KLT)スコア、及びパノプティックスコアを用いて評価される、請求項5に記載のシステム。
【請求項8】
前記複数の目標オブジェクトの各々に関連する前記速度情報は、(a)増速値、(b)減速値、及び(c)定速値のいずれかである、請求項5に記載のシステム。
【請求項9】
1又は複数の非一時的のマシン可読の情報記憶媒体であって、1又は複数のハードウェアプロセッサに実行されるときに、
ビデオに関連付けられた複数の未加工入力画像フレーム、及び前記複数の未加工入力画像フレームに挿入される複数の目標オブジェクトを受け取るステップであって、前記複数の未加工入力画像フレームは連続しており、前記複数の目標オブジェクトは、複数の静的オブジェクト及び動的オブジェクトを含む、ステップと、
フローマップベースの特徴抽出技法を用いて、前記複数の未加工入力画像フレームに関連付けられたフロー埋め込みを計算するステップと、
パノプティックセグメンテーション技法を用いて、前記複数の未加工入力画像フレームの各々に関連付けられたパノプティックラベル埋め込み、及びパノプティック画像埋め込みを計算するステップと、
訓練されたmulti Panoptic Geography Assistive Normalization(multi-PGAN)ベースの画像生成器を用いて、前記複数の未加工入力画像フレームの各々に関連付けられた前記フロー埋め込み、前記パノプティックラベル埋め込み、及び前記パノプティック画像埋め込みに基づいて、複数の合成された一連の画像フレームを生成するステップと、
挿入される前記複数の目標オブジェクトに関連する複数の挿入パラメータを獲得するステップであって、前記複数の挿入パラメータは、初期位置、前記複数の目標オブジェクトの各々に関連する速度情報、追加されるランダム行動、及びオブジェクトに追加するフレーム数を含む、ステップと、
訓練されたGenAIベースの深層学習ネットワークを用いて、前記複数の目標オブジェクト、前記複数の合成された一連の画像フレーム、挿入される前記複数の目標オブジェクトの各々に関連する前記複数の挿入パラメータ、複数の背景、及び複数のスケーリングされた合成画像フレームに基づいて、複数の拡張画像フレームを生成することによって、合成データセットを作成するステップと、
を実行させる、1又は複数の命令を含む、1又は複数の非一時的のマシン可読の情報記憶媒体。
【請求項10】
フローマップベースの特徴抽出器を用いて、前記複数の未加工入力画像フレームの各々に関連付けられた前記フロー埋め込みを抽出するステップは、
前記複数の未加工入力画像フレームから、第一の画像フレーム及び第二の画像フレームを受け取るステップであって、前記第一の画像フレーム及び前記第二の画像フレームは、連続する画像であるステップと、
前記パノプティックセグメンテーション技法を用いて、前記第一の画像フレーム及び前記第二の画像フレームに関連する複数のパノプティックセグメントを生成するステップと、
前記第一の画像フレーム及び前記第二の画像フレームに関連する前記複数のパノプティックセグメントの間の比較に基づいて、前記第一の画像フレーム及び前記第二の画像フレームから、複数の類似のインスタンスを識別するステップであって、類似のインスタンスが存在しない場合に、前記第二の画像フレームとの比較のために、前記第二の画像フレームに連続する画像フレームが識別され、前記比較は、前記複数の未加工入力画像フレームのうちの最後の画像フレームが比較されるまで繰り返されるステップと、
前記第一の画像フレーム及び前記第二の画像フレームの間の前記複数の類似のインスタンスを融合することによって、前記第一の画像フレーム及び前記第二の画像フレームの間の前記フロー埋め込みを計算するステップと、
を含む、請求項9に記載の1又は複数の非一時的のマシン可読の情報記憶媒体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書における本開示は一般に、データ生成、より具体的には、生成的人工知能ベースの合成データ生成のための方法及びシステムの領域に関する。
続きを表示(約 5,300 文字)
【0002】
(関連出願及び優先権の相互参照)
本出願は、2023年9月21日に出願されたインド出願第202321063543号の優先権を主張する。
【背景技術】
【0003】
視覚ベースのシステム、及び先進運転支援システム(ADAS)のような自動運転車両におけるその応用は、日々進化している。運転支援システムは主に、自動運転モデルを学習し、この深層学習モデルで注目される主な要因は、訓練のための実世界/現実的なデータセットの必要性である。これらのデータセットの質、量、多様性は、深層学習モデルの訓練、テスト、及び評価を行う際の重要な要素である。さらに、複数の地理、異なる天候条件、異なる周辺、及び道路状況を含むデータセットを持つことは難しいため、異なる条件に対応する任意のモデルを訓練することは、大きな課題である。
【0004】
ある調査報告書によると、安全及びセキュリティの面での信頼性のために、自動運転車両は、数十億マイルを運転する必要があり、全ての必要なデータセットを収集するのに10年近くを必要とする。データセットを収集するためのこの手動運転アプローチは、マンパワー及び適切なセンサー構成も必要とし、結局は高価なアプローチとなる。従来のシミュレーターは、現実とのギャップを減らし、膨大な訓練可能なデータセットを生成できるものもあるが、レンダリングされたシナリオは、実世界のシナリオと比較して非現実的に見える。深層ニューラルネットワークは、検討中のADASアプリケーションに特化した現実的なデータを生成するのに役立つことができる。しかしながら、上記の全てのアプローチは、訓練に対して意味のあるデータセットを必要とするが、これは未だ解決されていない。
【発明の概要】
【0005】
本開示の実施形態は、従来のシステムにおいて発明者によって認識される1又は複数の上記の技術的課題への解決策としての技術的改善を示す。例えば、1つの実施形態において、視覚ベースのシステムのための生成的人工知能ベースの合成データ生成の方法が提供される。方法は、1又は複数のハードウェアプロセッサによって、ビデオに関連付けられた複数の未加工入力画像フレームと、複数の未加工入力画像フレームに挿入される複数の目標オブジェクトとを受け取ることを含み、複数の未加工入力画像フレームは連続であり、複数の目標オブジェクトは、複数の静的オブジェクト、及び複数の動的オブジェクトを含む。さらに方法は、1又は複数のハードウェアプロセッサによって、フローマップベースの特徴抽出技法を使用して、複数の未加工入力画像フレームの各々に関連付けられたフロー埋め込みを計算することを含む。さらに、方法は、1又は複数のハードウェアプロセッサによって、パノプティックセグメンテーション技法を使用して、複数の未加工入力画像フレームの各々に関連付けられた光パノプティックラベル埋め込み、及びパノプティック画像埋め込みを計算することを含む。さらに、方法は、1又は複数のハードウェアプロセッサによって、訓練されたマルチパノプティック地理支援正規化(multi-PGAN)ベースの画像生成器を使用して、複数の未加工入力画像フレームの各々に関連付けられたフロー埋め込み、パノプティックラベル埋め込み、及びパノプティック画像埋め込みに基づいて、複数の合成された一連の画像フレームを生成することを含む。さらに、方法は、1又は複数のハードウェアプロセッサによって、挿入される複数の目標オブジェクトの各々に関連する複数の挿入パラメータを獲得することを含み、複数の挿入パラメータは、初期位置、複数の目標オブジェクトに関連する速度情報、追加されるランダム動作、及びオブジェクトを追加するフレーム数を含む。最後に、方法は、1又は複数のハードウェアプロセッサによって、訓練されたGenAIベースの深層学習ネットワークを用いて、複数の目標オブジェクトと、複数の合成された一連の画像フレームと、挿入される複数の目標オブジェクトに関連する複数の挿入パラメータと、複数の背景と、複数のスケーリングされた合成画像フレームとに基づいて複数の拡張画像フレームを生成することにより、合成データセット作成することを含む。
【0006】
別の様態において、視覚ベースのシステムのための生成的人工知能ベースの合成データ生成のためのシステムが提供される。システムは、プログラム可能命令を格納する少なくとも1つのメモリ、1又は複数の入力/出力(I/O)インターフェイス、及び少なくとも1つのメモリに動作可能に結合された1又は複数のハードウェアプロセッサを含み、1又は複数のハードウェアプロセッサは、ビデオに関連付けられた複数の未加工入力画像フレーム、及び複数の未加工入力画像フレームに挿入される複数の目標オブジェクトを受け取るようにプログラムされた命令により構成され、複数の未加工入力画像フレームは連続であり、複数の目標オブジェクトは、複数の静的オブジェクト及び複数の動的オブジェクトを含む。さらに、1又は複数のハードウェアプロセッサは、フローマップベースの特徴抽出技法を使用して、複数の未加工入力画像フレームの各々に関連付けられたフロー埋め込みを計算するようにプログラムされた命令により構成される。さらに、1又は複数のハードウェアプロセッサは、パノプティックセグメンテーション技法を用いて、複数の未加工入力画像フレームの各々に関連付けられたパノプティックラベル埋め込み、及びパノプティック画像埋め込みを計算するようにプログラムされた命令により構成される。さらに、1又は複数のハードウェアプロセッサは、訓練されたマルチパノプティック地理支援正規化(multi-PGAN)ベースの画像生成器を用いて、複数の未加工入力画像フレームの各々に関連付けられたフロー埋め込み、パノプティックラベル埋め込み、及びパノプティック画像埋め込みに基づいて、複数の合成された一連の画像フレームを生成するようにプログラムされた命令により構成される。さらに、1又は複数のハードウェアプロセッサは、挿入される複数の目標オブジェクトの各々に関連する複数の挿入パラメータを獲得するようにプログラムされた命令により構成され、複数の挿入パラメータは、初期位置、複数の目標オブジェクトの各々に関連する速度情報、追加されるランダム行動、及びオブジェクトを追加するフレーム数を含む。最後に、1又は複数のハードウェアプロセッサは、訓練されたGenAIベースの深層学習ネットワークを用いて、複数の目標オブジェクト、複数の合成された一連の画像フレーム、挿入された複数の目標オブジェクトに関連する複数の挿入パラメータ、複数の背景、及び複数のスケーリングされた合成画像フレームに基づいて、複数の拡張画像フレームを生成することにより合成されたデータセットを作成するようにプログラムされた命令により構成される。
【0007】
さらに別の様態において、視覚ベースのシステムのための生成的人工知能ベースの合成データ生成のための自身に埋め込まれたコンピュータプログラムを有する非一時的コンピュータ可読媒体を含むコンピュータプログラム製品が提供される。コンピュータ可読プログラムは、コンピューティングデバイス上で実行されるとき、コンピューティングデバイスに、ビデオに関連付けられた複数の未加工入力画像フレーム、及び複数の未加工入力画像フレームに挿入される複数の目標オブジェクトを受け取らせ、複数の未加工入力画像フレームは連続であり、複数の目標オブジェクトは、複数の静的オブジェクト、及び複数の動的オブジェクトを含む。さらに、コンピュータ可読プログラムは、コンピューティングデバイス上で実行されるとき、コンピューティングデバイスに、フローマップベースの特徴抽出技法を用いて、複数の未加工入力画像フレームの各々に関連付けられたフロー埋め込みを計算させる。さらに、コンピュータ可読プログラムは、コンピュータデバイス上で実行されるとき、コンピューティングデバイスに、パノプティックセグメンテーション技法を用いて、複数の未加工入力画像フレームの各々に関連付けられたパノプティックラベル埋め込み、及びパノプティック画像埋め込みを計算させる。そのうえ、コンピュータ可読プログラムは、コンピューティングデバイス上で実行されるとき、コンピューティングデバイスに、訓練されたマルチパノプティック地理支援正規化(multi-PGAN)ベースの画像生成器を用いて、複数の未加工入力画像フレームの各々に関連付けられたフロー埋め込み、パノプティックラベル埋め込み、及びパノプティック画像埋め込みに基づいて、複数の合成された一連の画像フレームを生成させる。さらに、コンピュータ可読プログラムは、コンピューティングデバイス上で実行されるとき、コンピューティングデバイスに、挿入される複数の目標オブジェクトの各々に関連する複数の挿入パラメータを獲得させ、複数の挿入パラメータは初期位置、複数の目標オブジェクトの各々に関連する速度情報、追加されるランダム行動、及びオブジェクトが追加されるフレーム数を含む。最後に、コンピュータ可読プログラムは、訓練されたGenAIベースの深層学習ネットワークを用いて、コンピューティングデバイス上で実行されるとき、コンピューティングデバイスに、複数の目標オブジェクト、複数の合成された一連の画像フレーム、挿入される複数の目標オブジェクトに関連する複数の挿入パラメータ、複数の背景、及び複数のスケーリングされた合成画像フレームに基づいて、複数の拡張画像フレームを生成させることにより、合成データセットを作成させる。
【0008】
上記の一般的な説明、及び次の詳細な説明の両方は、単なる例示的及び説明的であり、請求する発明の内容を制限しないことを理解されたい。
本開示の一部に組み込まれ、構成される添付の図面は、例示的な実施形態を図示し、説明とともに、開示される原理の説明を与える。
【図面の簡単な説明】
【0009】
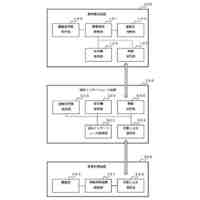
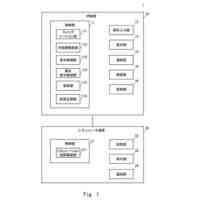
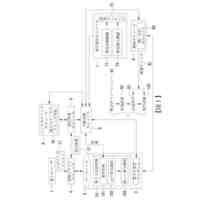
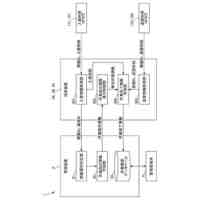
本開示のいくつかの実施形態による、視覚ベースのシステムのための生成的人工知能(GenAI)ベースの合成データ生成のためのシステムの機能ブロック図である。
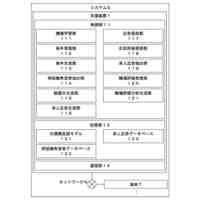
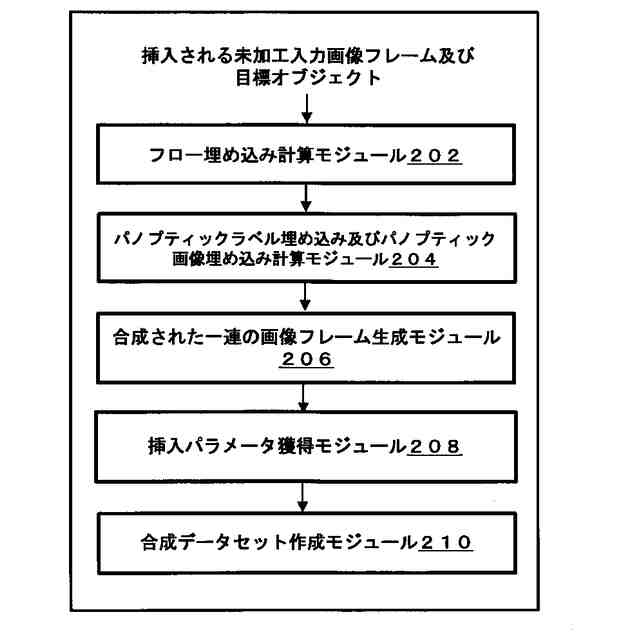
本開示のいくつかの実施形態による、視覚ベースのシステムのためのGenAIベースの合成データ生成のための図1のシステムの機能体系である。
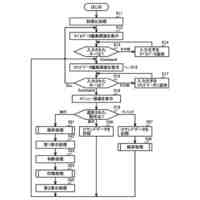
本開示のいくつかの実施形態による、図1のシステムにより実装される視覚ベースのシステムのためのGenAIベースの合成データ生成のためのプロセッサ実装方法を図示する例示的なフロー図である。
本開示のいくつかの実施形態による、図1のシステムにより実装されるフロー埋め込みを計算するためのプロセッサ実装方法を図示する、例示的なフロー図である。
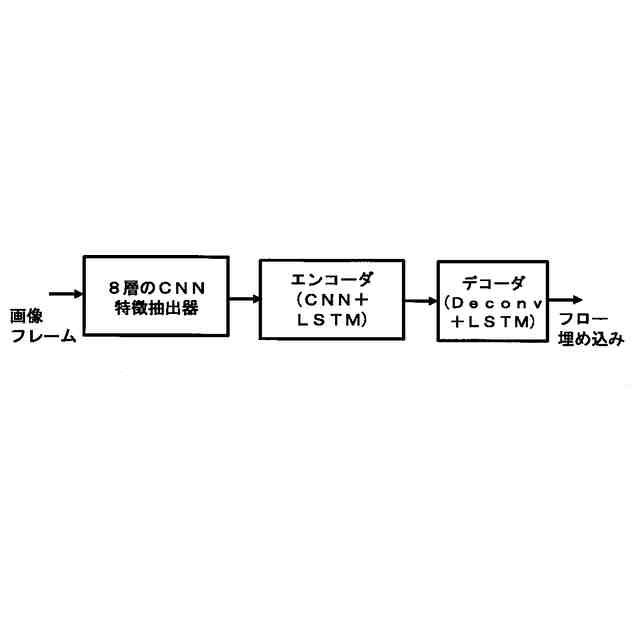
本開示のいくつかの実施形態による、図1のシステムにより実装される視覚ベースのシステムのためのGenAIベースの合成データ生成のためのフロー埋め込みを抽出する例示的な深層学習ネットワークである。
本開示のいくつかの実施形態による、図1のシステムにより実装される視覚ベースのシステムのためのGenAIベースの合成データ生成のための例示的なマルチパノプティック地理支援正規化(multi-PGAN)隊形である。
本開示のいくつかの実施形態による、図1のシステムにより実装された視覚ベースのシステムのための、GenAIベースの合成データ生成のためのmulti-PGAN構造に関連付けられたmulti-PGAN残余ブロックの構造である。
本開示のいくつかの実施形態による、図1のシステムによって実装される視覚ベースのシステムのためのGenAIベースの合成データ生成のためのPGANの構造図である。
本開示のいくつかの実施形態による、図1のシステムにより実装される視覚ベースのシステムのためのGenAIベースの合成データ生成のためのmulti-PGANベースの画像生成器の識別器の構造である。
【発明を実施するための形態】
【0010】
例示的な実施形態は、添付の図面を参照して記述される。図において、参照番号の左端の桁は、参照番号が最初に登場する図を識別する。便利な場合は、同じ参照番号は、図面を通して同じ又は類似の部分を参照するように使用される。開示された原理の例及び特徴が本明細書に記述されるが、開示される実施形態の範囲から逸脱することなく、修正、適用、及び他の実装が可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
非正規コート
8日前
個人
人物再現システム
5日前
キヤノン電子株式会社
通信システム
19日前
有限会社ノア
データ読取装置
6日前
株式会社ザメディア
出席管理システム
13日前
個人
広告提供システムおよびその方法
8日前
個人
日誌作成支援システム
5日前
トヨタ自動車株式会社
作業判定方法
14日前
株式会社タクテック
商品取出集品システム
12日前
トヨタ自動車株式会社
工程計画装置
13日前
個人
ポイント還元付き配送システム
6日前
トヨタ自動車株式会社
作業評価装置
19日前
ミサワホーム株式会社
情報処理装置
12日前
オベック実業株式会社
接続構造
5日前
株式会社NURSY
再就職の支援装置
20日前
トヨタ自動車株式会社
情報処理システム
14日前
ゼネラル株式会社
RFIDタグ付き物品
15日前
個人
公益寄付インタラクティブシステム
19日前
株式会社村田製作所
動き検知装置
12日前
株式会社実身美
ワーキングシェアリングシステム
6日前
富士フイルム株式会社
タッチセンサ
19日前
株式会社インテック
触覚ディスプレイ装置
20日前
トヨタ自動車株式会社
情報処理方法
14日前
株式会社ドクター中松創研
生成AIの適切使用法
5日前
大王製紙株式会社
作業管理システム
20日前
個人
コンテンツ配信システム
12日前
株式会社国際電気
支援システム
15日前
ブラザー工業株式会社
ラベルプリンタ
14日前
個人
プラットフォームシステム
12日前
株式会社デンソー
情報処理方法
19日前
株式会社エスシーシー
置き配システム
6日前
富士通株式会社
画像生成方法
18日前
トヨタ自動車株式会社
作業支援システム
12日前
株式会社 喜・扇
緊急事態対応円滑化システム
5日前
株式会社K-model
運用設計資料作成装置
8日前
甍エンジニアリング株式会社
屋根材買い取りシステム
18日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ