TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025059211
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169140
出願日
2023-09-29
発明の名称
作業支援システム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
G06T
7/20 20170101AFI20250403BHJP(計算;計数)
要約
【課題】監視中の作業が中断後に再開した場合にその再開を確認可能とする。
【解決手段】端末装置10は、撮影装置20の画像から抽出した作業者の骨格座標に基づき、作業者が実施中の作業の段階を検出する。そして、端末装置10は、検出した作業の段階が既定の順序で正常に行われているか否かを判定することで作業監視を行う。さらに端末装置10は、作業の各段階が既定の順序で正常に行われていないと判定した場合には、その判定後に、同判定の直前の時点での実施順序に該当する作業の段階を作業者が行っていることを検出した場合に、作業が正常復帰したと判定する。
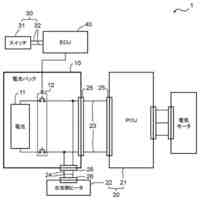
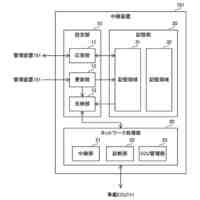
【選択図】図2
特許請求の範囲
【請求項1】
既定の順序で行われる複数の段階を通じて行われる作業者の作業を支援するシステムであって、
前記作業者を撮影する撮影装置と、処理部と、を備えており、
前記処理部は、
前記撮影装置の画像から抽出した前記作業者の骨格座標に基づき、前記作業者が実施中の前記作業の段階を検出するとともに、検出した前記作業の段階が前記既定の順序で正常に行われているか否かを判定することで作業監視を行うことと、
前記作業の各段階が前記既定の順序で正常に行われていないと判定した場合には、その判定後に、同判定の直前の時点での実施順序に該当する前記作業の段階を前記作業者が行っていることを検出した場合に、前記作業が正常復帰したと判定することと、
を行う作業支援システム。
続きを表示(約 380 文字)
【請求項2】
前記処理部は、前記作業が正常に行われていないと判定した場合に前記作業監視を中止する請求項1に記載の作業支援システム。
【請求項3】
前記処理部は、前記作業が正常に行われていないと判定した時点から既定時間以内に前記作業が正常復帰したと判定しなかった場合に前記作業監視を中止する請求項1に記載の作業支援システム。
【請求項4】
前記処理部は、前記作業が正常に行われていないと判定した後、前記順序が1番目の前記作業の段階を前記作業者が行っていることを検出した場合に、前記作業が新規に開始されたと判定する請求項1に記載の作業支援システム。
【請求項5】
前記処理部は、前記骨格座標に基づく前記作業の段階の検出を、機械学習により学習された学習モデルを用いて行う請求項1に記載の作業支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業支援システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
製造現場での部品組付けなどの作業を支援するシステムとして、特許文献1に記載の作業支援システムが知られている。この作業支援システムは、作業者の手元を撮影する撮影装置を備えている。そして、この作業支援システムは、撮影装置の映像から取得した手指の骨格座標に基づき、部品が正確に組付けられたか否かを判定している。
【先行技術文献】
【特許文献】
【0003】
特開2021-163293号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業者が一時的に作業を中断する場合がある。上記作業支援システムには、こうした中断後の作業の再開を確認する手段が用意されていない。
【課題を解決するための手段】
【0005】
上記課題を解決する作業支援システムは、既定の順序で行われる複数の段階を通じて行われる作業者の作業を支援するシステムであって、前記作業者を撮影する撮影装置と、処理部と、を備えている。そして、同作業支援システムの処理部は、前記撮影装置の画像から抽出した前記作業者の骨格座標に基づき、前記作業者が実施中の前記作業の段階を検出するとともに、検出した前記作業の段階が前記既定の順序で正常に行われているか否かを判定することで作業監視を行うことと、前記作業の各段階が前記既定の順序で正常に行われていないと判定した場合には、その判定後に、同判定の時点での実施順序に該当する前記作業の段階を行っていることを検出した場合に、前記作業が正常復帰したと判定することと、を行うように構成されている。
【0006】
上記作業支援システムの処理部は、前記骨格座標に基づく前記作業の段階の検出を、機械学習により学習された学習モデルを用いて行うように構成可能である。
【発明の効果】
【0007】
上記作業支援システムには、監視中の作業が中断後に再開した場合、その再開を確認できるという効果がある。
【図面の簡単な説明】
【0008】
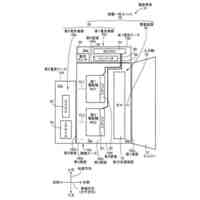
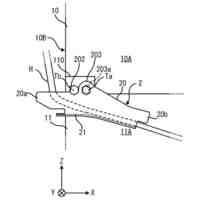
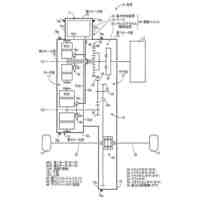
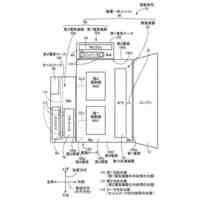
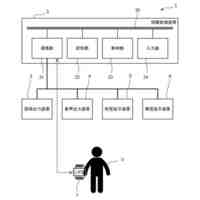
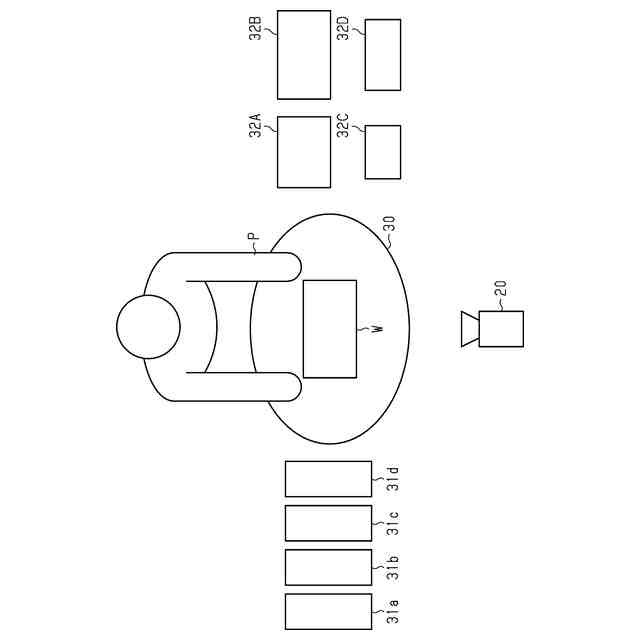
作業場の模式的な平面図である。
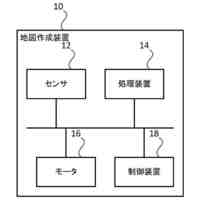
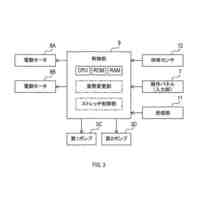
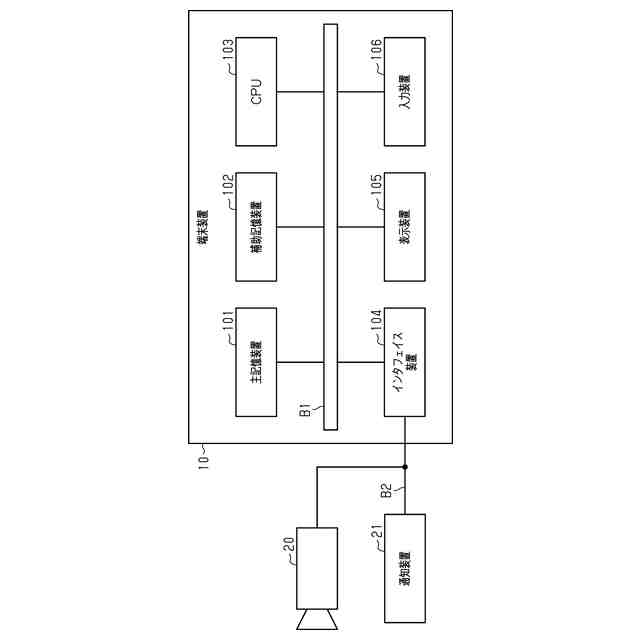
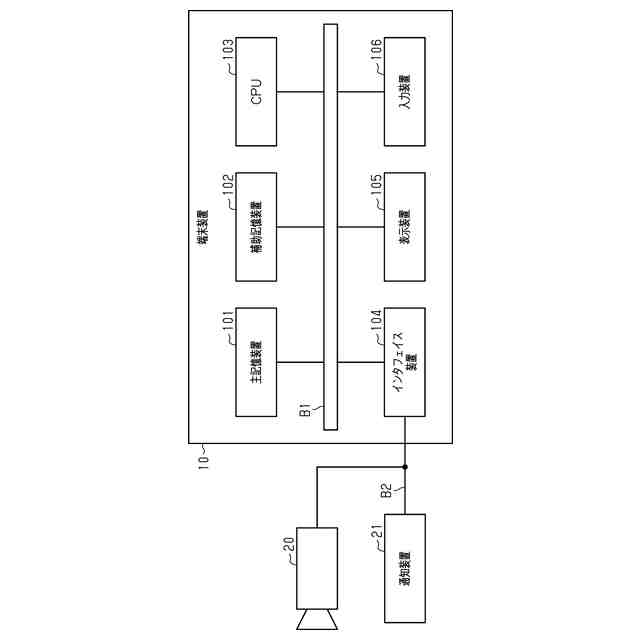
作業支援システムの一実施形態の構成を模式的に示す図である。
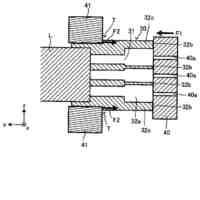
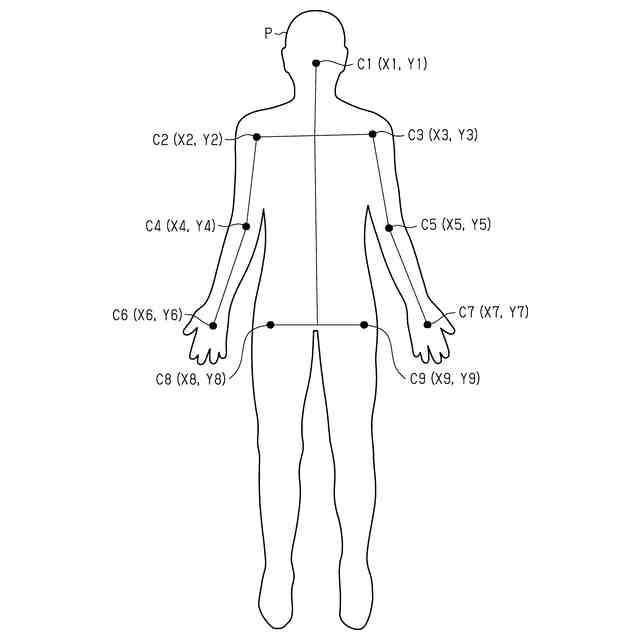
骨格座標の設定態様の一例を示す図である。
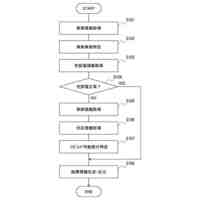
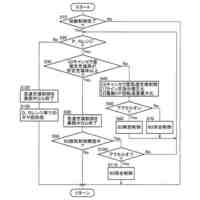
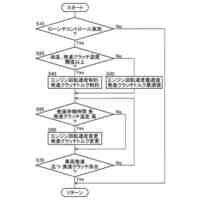
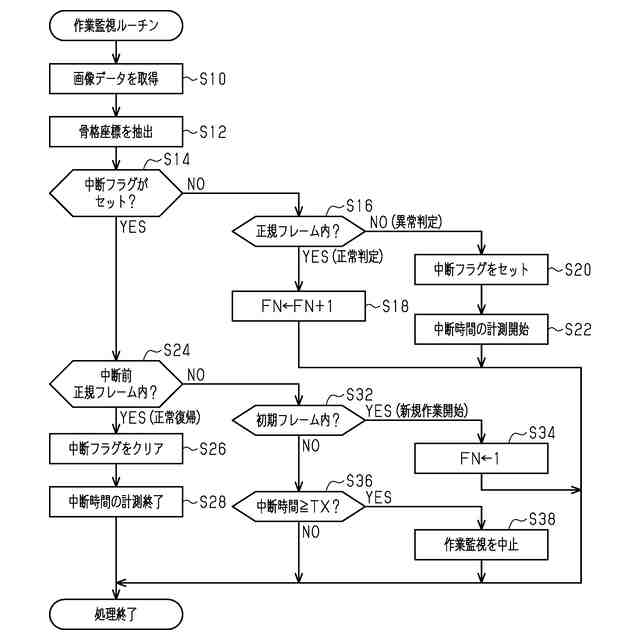
作業支援システムにおいて実行される作業監視ルーチンのフローチャートである。
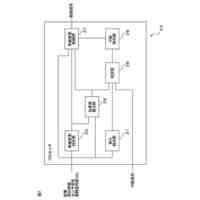
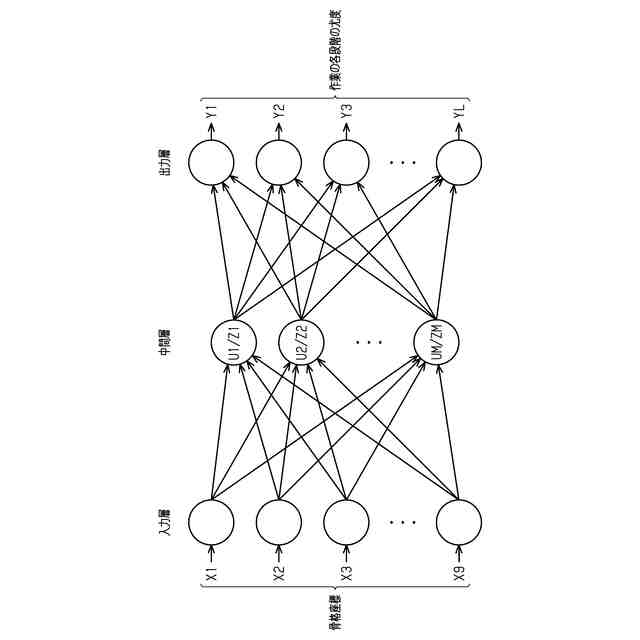
作業の正誤判定用の学習モデルの構成を模式的に示す図である。
【発明を実施するための形態】
【0009】
以下、作業支援システムの一実施形態を、図1~図5を参照して詳細に説明する。
<支援対象の作業について>
まず、図1を参照して、本実施形態の作業支援システムが支援の対象とする作業について説明する。本実施形態では、ワークWに対する部品の組付作業を支援するように作業支援システムを構成した場合を例として説明する。本実施形態の作業支援システムは、溶接作業、塗装作業、検査作業などの組付作業以外の作業を支援するように構成することも可能である。
【0010】
図1には、部品の組付作業が行われる作業場の模式的な平面図が示されている。ここでの組付け作業は、一人の作業者Pにより行われる。作業場には、作業中にワークWが載置される作業台30が設置されている。作業台30の側方には、ワークWに組付ける各部品A~Dがそれぞれ収容された部品箱32A~32Dが設置されている。部品箱32A~32Dが設置された側とは反対側の作業台30の側方には、部品A~Dの組付けに用いる各ボルトa~dがそれぞれ収容されたボルト箱31a~31dが設置されている。ボルト箱31a~31d及び部品箱32A~32Dの正面には、それぞれインジケータ33が設置されている。さらに作業場には、撮影装置20が設置されている。撮影装置20は、作業台30、ボルト箱31a~31d、部品箱32A~32Dとともに、作業中の作業者Pを撮影するように設置されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
ドローン
3日前
トヨタ自動車株式会社
エンジン
3日前
トヨタ自動車株式会社
二次電池
2日前
トヨタ自動車株式会社
内燃機関
2日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
情報処理方法
2日前
トヨタ自動車株式会社
端子接続構造
2日前
トヨタ自動車株式会社
灯火制御装置
3日前
トヨタ自動車株式会社
駆動ユニット
2日前
トヨタ自動車株式会社
地図作成装置
3日前
トヨタ自動車株式会社
車両の制御装置
3日前
トヨタ自動車株式会社
車両の制御装置
3日前
トヨタ自動車株式会社
ラミネート型電池
3日前
トヨタ自動車株式会社
センサ取付構造体
3日前
トヨタ自動車株式会社
燃料電池ドローン
2日前
トヨタ自動車株式会社
ハイブリッド車両
2日前
トヨタ自動車株式会社
ハイブリッド車両
2日前
トヨタ自動車株式会社
車両電源システム
2日前
トヨタ自動車株式会社
電池の製造方法、及び、電池
2日前
トヨタ自動車株式会社
ハイブリッド車両の制御装置
3日前
トヨタ自動車株式会社
ハイブリッド車両の制御装置
3日前
トヨタ自動車株式会社
負極合材及びリチウム二次電池
3日前
トヨタ自動車株式会社
負極合材及びリチウム二次電池
3日前
トヨタ紡織株式会社
仮眠用シート
2日前
トヨタ自動車株式会社
リチウム二次電池、及びリチウム二次電池の製造方法
3日前
トヨタ自動車株式会社
電極活物質層、固体電池、及び電極活物質層の製造方法
3日前
トヨタ自動車株式会社
電極構造体
2日前
トヨタ自動車株式会社
車両制御装置
2日前
トヨタ自動車株式会社
固体電池用の電極合材スラリー及び電極合材スラリーの製造方法
2日前
株式会社豊田中央研究所
情報処理システム、情報処理方法及びプログラム
3日前
株式会社トヨタプロダクションエンジニアリング
鍛造キズ判定システム、鍛造キズ判定装置及び鍛造キズ判定方法
3日前
住友電気工業株式会社
車載中継装置、設定変更方法および設定変更プログラム
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ