TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025060630
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2024212329,2023169549
出願日
2024-12-05,2023-09-29
発明の名称
移動体の制御装置、移動体の制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
G06T
7/00 20170101AFI20250403BHJP(計算;計数)
要約
【課題】より精度良く光源ノイズを認識または除去することができる移動体の制御装置、移動体の制御方法、およびプログラムを提供すること。
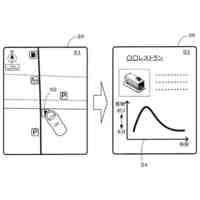
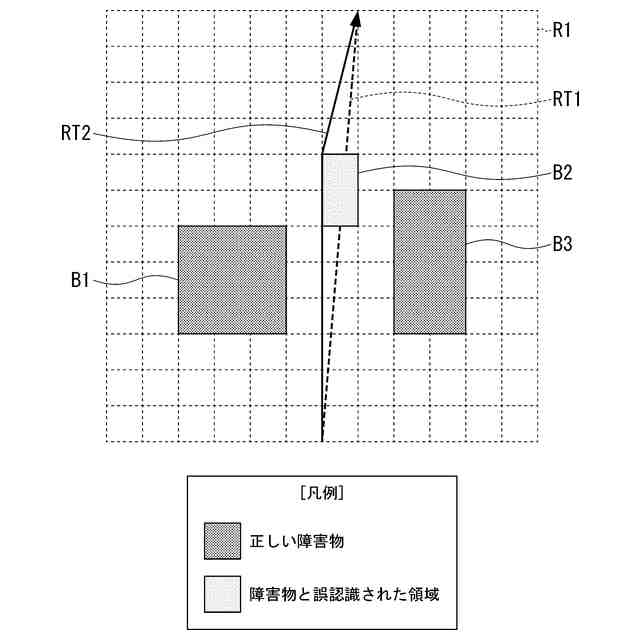
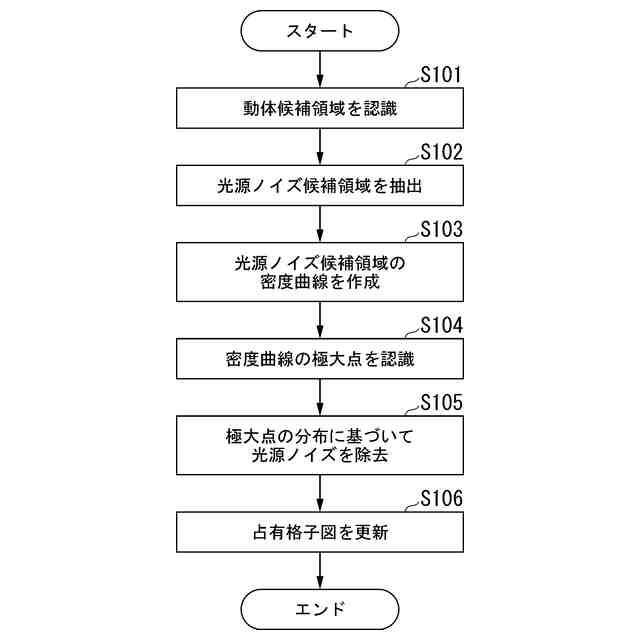
【解決手段】移動体の周辺の状況が撮像された画像に基づいて前記移動体の周辺に存在する物体に対応する点群を認識する認識部と、前記周辺の状況に基づいて前記移動体の移動経路を決定し、決定した前記移動経路を移動するように前記移動体を制御する制御部と、を備え、前記認識部は、前記移動体の周辺の所定領域において、前記物体の候補として認識された点群の高さ方向の分布を求め、当該分布において高さの条件を含む所定の条件を満たす点群を光源ノイズとして除去する、移動体の制御装置。
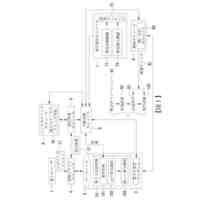
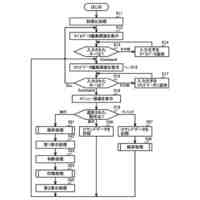
【選択図】図4
特許請求の範囲
【請求項1】
移動体の周辺の状況が撮像された画像に基づいて前記移動体の周辺に存在する物体に対応する点群を認識する認識部と、
前記周辺の状況に基づいて前記移動体の移動経路を決定し、決定した前記移動経路を移動するように前記移動体を制御する制御部と、を備え、
前記認識部は、前記移動体の周辺の所定領域において、前記物体の候補として認識された点群の高さ方向の分布を求め、当該分布において高さの条件を含む所定の条件を満たす点群を光源ノイズとして除去する、
移動体の制御装置。
続きを表示(約 1,300 文字)
【請求項2】
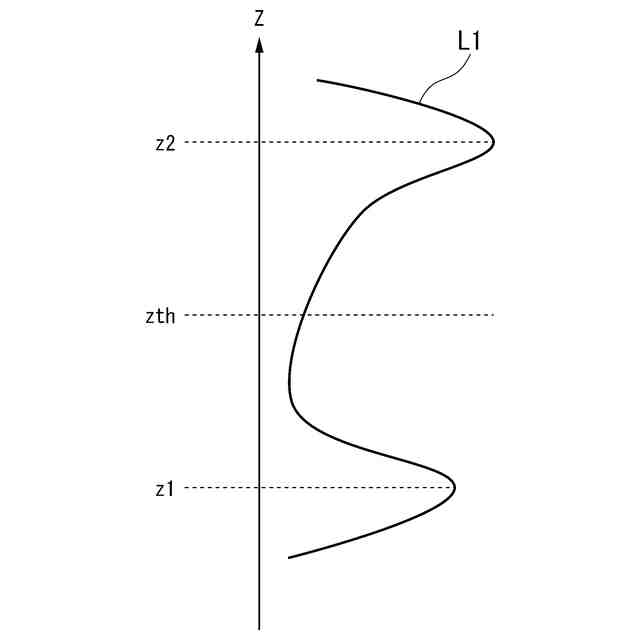
前記認識部は、前記分布を表す曲線における極大点を認識し、認識された極大点のうちの所定の高さ以上である極大点に係る点群を、前記所定の条件を満たす点群として除去する、
請求項1に記載の移動体の制御装置。
【請求項3】
前記認識部は、前記分布において高さ方向に離間して存在する複数の点群のうち、所定の高さ以上である点群を、前記所定の条件を満たす点群として除去する、
請求項1に記載の移動体の制御装置。
【請求項4】
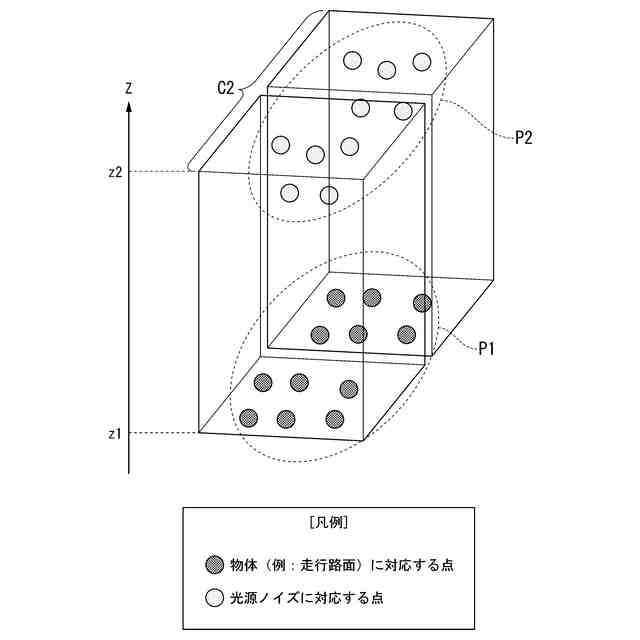
前記認識部は、前記分布において走行路面に対応する点群とは高さ方向の位置が異なる点群を、前記所定の条件を満たす点群として除去する、
請求項1に記載の移動体の制御装置。
【請求項5】
前記所定の高さは、前記移動体が走行する環境に応じて異なるように調整される、
請求項2又は3に記載の移動体の制御装置。
【請求項6】
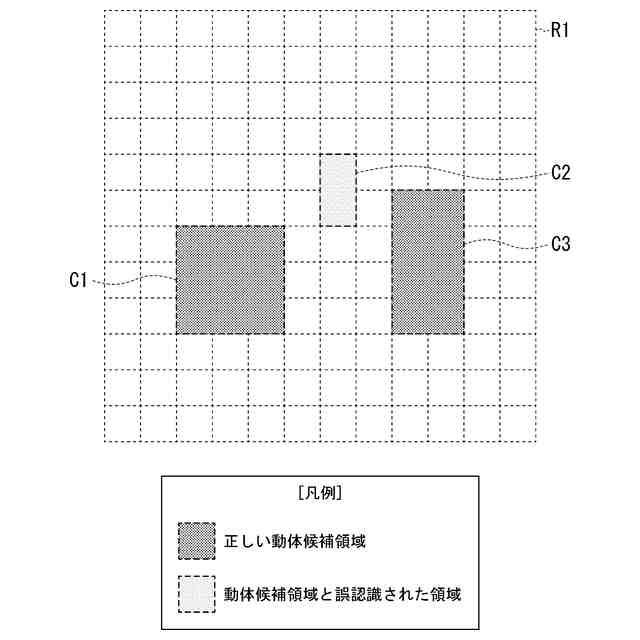
前記認識部は、前記画像から認識された点群のクラスタリングにより前記物体の候補領域を認識し、前記候補領域のうち、所定サイズ以下のものを前記光源ノイズの候補領域として認識する、
請求項1に記載の移動体の制御装置。
【請求項7】
前記認識部は、前記光源ノイズの候補領域に含まれる単位領域ごとに、前記所定の条件を満たす点群の判定および除去を実行する、
請求項6に記載の移動体の制御装置。
【請求項8】
前記認識部は、前記極大点を形成するピークの形状の条件を更に満たす点群を、前記所定の条件を満たす点群として除去する、
請求項2に記載の移動体の制御装置。
【請求項9】
コンピュータが、
移動体の周辺の状況が撮像された画像に基づいて前記移動体の周辺に存在する物体に対応する点群を認識するための認識処理と、
前記周辺の状況に基づいて前記移動体の移動経路を決定し、決定した前記移動経路を移動するように前記移動体を制御するための制御処理と、
を実行する移動体の制御方法であって、
前記認識処理では、前記移動体の周辺の所定領域において、前記物体の候補として認識された点群の高さ方向の分布を求め、当該分布において高さの条件を含む所定の条件を満たす点群を光源ノイズとして除去、
移動体の制御方法。
【請求項10】
コンピュータに、
移動体の周辺の状況が撮像された画像に基づいて前記移動体の周辺に存在する物体に対応する点群を認識するための認識処理と、
前記周辺の状況に基づいて前記移動体の移動経路を決定し、決定した前記移動経路を移動するように前記移動体を制御するための制御処理と、
を実行させるためのプログラムであって、
前記認識処理は、前記移動体の周辺の所定領域において、前記物体の候補として認識された点群の高さ方向の分布を求め、当該分布において高さの条件を含む所定の条件を満たす点群を光源ノイズとして除去するものである、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の制御装置、移動体の制御方法、およびプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、LIDAR機器の出力に基づいて決定された候補障害物に対応する点(以下、対応点)を水平面の領域に投影して水平面上のグリッドに関連付け、対応点とグリッドとの関連付けの状況に基づいて候補障害物からノイズに対応する第一候補障害物セットを除去することが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特表2023-517105号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、候補障害物から光源ノイズを適切に認識できない場合があり、適切に光源ノイズを除去できない場合があった。
【0005】
本発明は、このような事情を考慮してなされたものであり、より精度良く光源ノイズを認識または除去することができる移動体の制御装置、移動体の制御方法、およびプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る移動体の制御装置、移動体の制御方法、およびプログラムは、以下の構成を採用した。
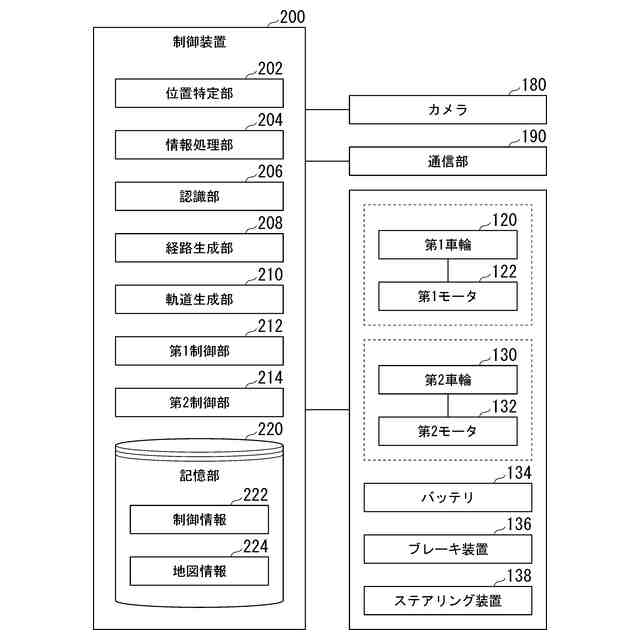
(1):この発明の一態様に係る移動体の制御装置は、移動体の周辺の状況が撮像された画像に基づいて前記移動体の周辺に存在する物体に対応する点群を認識する認識部と、前記周辺の状況に基づいて前記移動体の移動経路を決定し、決定した前記移動経路を移動するように前記移動体を制御する制御部と、を備え、前記認識部は、前記移動体の周辺の所定領域において、前記物体の候補として認識された点群の高さ方向の分布を求め、当該分布において高さの条件を含む所定の条件を満たす点群を光源ノイズとして除去する、移動体の制御装置である。
【0007】
(2):上記(1)の態様において、前記認識部は、前記分布を表す曲線における極大点を認識し、認識された極大点のうちの所定の高さ以上である極大点に係る点群を、前記所定の条件を満たす点群として除去するものである。
【0008】
(3):上記(1)の態様において、前記認識部は、前記分布において高さ方向に離間して存在する複数の点群のうち、所定の高さ以上である点群を、前記所定の条件を満たす点群として除去するものである。
【0009】
(4):上記(1)の態様において、前記認識部は、前記分布において走行路面に対応する点群とは高さ方向の位置が異なる点群を、前記所定の条件を満たす点群として除去するものである。
【0010】
(5):上記(2)または(3)の態様において、前記所定の高さは、前記移動体が走行する環境に応じて異なるように調整されるものである
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
非正規コート
今日
キヤノン電子株式会社
通信システム
11日前
株式会社ザメディア
出席管理システム
5日前
個人
広告提供システムおよびその方法
今日
トヨタ自動車株式会社
作業判定方法
6日前
ミサワホーム株式会社
情報処理装置
4日前
株式会社タクテック
商品取出集品システム
4日前
トヨタ自動車株式会社
工程計画装置
5日前
トヨタ自動車株式会社
作業評価装置
11日前
株式会社村田製作所
動き検知装置
4日前
トヨタ自動車株式会社
情報処理システム
6日前
個人
公益寄付インタラクティブシステム
11日前
ゼネラル株式会社
RFIDタグ付き物品
7日前
富士フイルム株式会社
タッチセンサ
11日前
株式会社国際電気
支援システム
7日前
個人
コンテンツ配信システム
4日前
トヨタ自動車株式会社
情報処理方法
6日前
個人
プラットフォームシステム
4日前
富士通株式会社
画像生成方法
10日前
株式会社デンソー
情報処理方法
11日前
ブラザー工業株式会社
ラベルプリンタ
6日前
株式会社知財事業研究所
運行計画作成システム
4日前
甍エンジニアリング株式会社
屋根材買い取りシステム
10日前
株式会社K-model
運用設計資料作成装置
今日
トヨタ自動車株式会社
作業支援システム
4日前
株式会社日立製作所
設計支援装置
5日前
日立建機株式会社
作業機械の管理装置
7日前
株式会社マーケットヴィジョン
情報処理システム
11日前
日立建機株式会社
潤滑油診断システム
5日前
アルプスアルパイン株式会社
入力装置
10日前
トヨタ自動車株式会社
車両用の情報処理装置
5日前
株式会社日立製作所
タスク管理システム
4日前
株式会社けんさんぎふと
カタログギフトの管理装置
今日
株式会社アイシン
情報提供システム
10日前
トヨタ自動車株式会社
車両用の情報処理装置
6日前
セイコーエプソン株式会社
印刷システム
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ