TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025060227
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170822
出願日
2023-09-29
発明の名称
運転支援装置、運転支援方法、およびプログラム
出願人
本田技研工業株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
G08G
1/16 20060101AFI20250403BHJP(信号)
要約
【課題】自車両の運転支援を適切に行うことが可能な技術を提供する。
【解決手段】運転支援装置は、過去において自車両の走行軌跡と他車両の走行軌跡とが交差した位置をそれぞれ示す複数の交差位置を記憶している記憶手段と、周辺車両の周辺車両情報を車車間通信により取得する取得手段と、自車両情報と前記周辺車両情報とに基づいて、前記自車両の前方の対象領域内における前記自車両と前記周辺車両との衝突可能性を予測する予測手段と、前記予測手段での予測結果に基づいて前記自車両の運転支援を行う支援手段と、を備え、前記予測手段は、前記複数の交差位置のうち何れも前記自車両の前方の所定距離内に存在しない場合、前記対象領域を第1領域にして前記衝突可能性を予測し、前記複数の交差位置のうち少なくとも1つの交差位置が前記所定距離内に存在する場合、前記対象領域を前記第1領域よりも大きい第2領域に設定して前記衝突可能性を予測する。
【選択図】図1
特許請求の範囲
【請求項1】
過去において自車両の走行軌跡と他車両の走行軌跡とが交差した位置をそれぞれ示す複数の交差位置を記憶している記憶手段と、
前記自車両の周辺に存在する周辺車両の現在位置、速度および走行軌跡を含む周辺車両情報を、車車間通信により前記周辺車両から取得する取得手段と、
前記自車両の現在位置、速度および走行軌跡を含む自車両情報と、前記取得手段で取得された前記周辺車両情報とに基づいて、前記自車両の前方の対象領域内における前記自車両と前記周辺車両との衝突可能性を予測する予測手段と、
前記予測手段での予測結果に基づいて、前記自車両の乗員への報知、および、前記自車両の減速支援のうち少なくとも1つを含む前記自車両の運転支援を行う支援手段と、
を備え、
前記予測手段は、
前記記憶手段に記憶されている前記複数の交差位置のうち何れも前記自車両の前方の所定距離内に存在しない場合、前記対象領域を第1領域に設定して前記衝突可能性を予測し、
前記記憶手段に記憶されている前記複数の交差位置のうち少なくとも1つの交差位置が前記所定距離内に存在する場合、前記対象領域を前記第1領域よりも大きい第2領域に設定して前記衝突可能性を予測する、
ことを特徴とする運転支援装置。
続きを表示(約 1,800 文字)
【請求項2】
前記記憶手段は、前記複数の交差位置の各々を前記他車両の走行軌跡と対応付けて記憶しており、
前記予測手段は、前記少なくとも1つの交差位置が前記所定距離内に存在する場合、前記少なくとも1つの交差位置に対応付けて前記記憶手段に記憶されている前記他車両の走行軌跡に基づいて、前記衝突可能性を予測する、ことを特徴とする請求項1に記載の運転支援装置。
【請求項3】
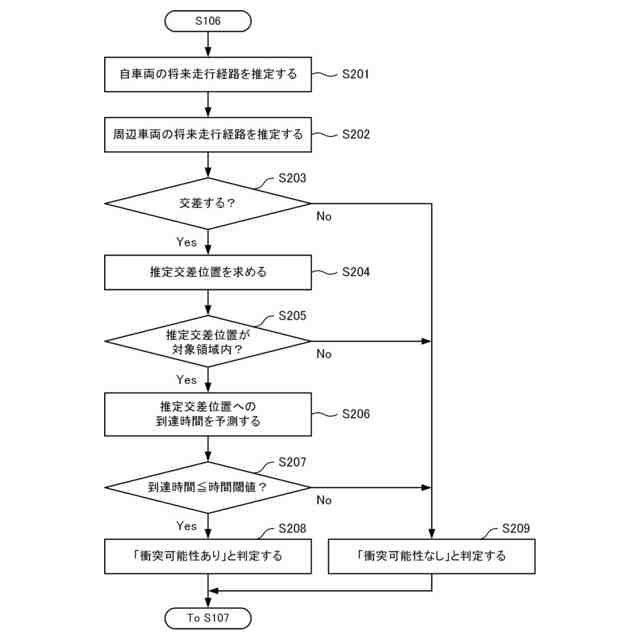
前記予測手段は、前記取得手段で取得された前記周辺車両情報に基づいて推定される前記周辺車両の将来の走行経路と、前記自車両情報に基づいて推定される前記自車両の将来の走行経路とが交差する位置を推定交差位置として求めるとともに、前記推定交差位置に前記周辺車両が到達するまでの到達時間を前記衝突可能性として予測し、
前記支援手段は、前記到達時間が時間閾値以下である場合に前記運転支援を行い、前記到達時間が前記時間閾値よりも大きい場合には前記運転支援を行わない、ことを特徴とする請求項1に記載の運転支援装置。
【請求項4】
前記記憶手段は、前記複数の交差位置の各々を前記他車両の走行軌跡と対応付けて記憶しており、
前記予測手段は、前記少なくとも1つの交差位置が前記所定距離内に存在する場合、前記少なくとも1つの交差位置に対応付けて前記記憶手段に記憶されている前記他車両の走行軌跡に基づいて、前記少なくとも1つの交差位置と前記周辺車両との間の距離を求めるとともに、前記距離と前記周辺車両情報とに基づいて、前記少なくとも1つの交差位置に前記周辺車両が到達するまでの到達時間を前記衝突可能性として予測し、
前記支援手段は、前記到達時間が時間閾値以下である場合に前記運転支援を行い、前記到達時間が前記時間閾値よりも大きい場合には前記運転支援を行わない、ことを特徴とする請求項1に記載の運転支援装置。
【請求項5】
前記支援手段は、前記周辺車両情報における前記周辺車両の速度に応じて前記時間閾値を変更する、ことを特徴とする請求項3又は4に記載の運転支援装置。
【請求項6】
前記時間閾値は、前記自車両の乗員によって設定可能である、ことを特徴とする請求項3又は4に記載の運転支援装置。
【請求項7】
前記予測手段は、前記取得手段で取得された前記周辺車両情報に基づいて推定される前記周辺車両の将来の走行経路と、前記自車両情報に基づいて推定される前記自車両の将来の走行経路とが交差する位置を推定交差位置として求めるとともに、前記周辺車両が現在位置から所定の減速度で減速したときの停止位置を前記衝突可能性として予測し、
前記支援手段は、前記停止位置が前記推定交差位置よりも前記周辺車両の進行方向前方である場合に前記運転支援を行い、前記停止位置が前記推定交差位置よりも前記周辺車両の進行方向後方である場合には前記運転支援を行わない、ことを特徴とする請求項1に記載の運転支援装置。
【請求項8】
前記支援手段は、前記予測手段で予測された前記衝突可能性に関わらず、前記周辺車両情報における前記周辺車両の速度が規定範囲外である場合には前記運転支援を行わない、ことを特徴とする請求項1に記載の運転支援装置。
【請求項9】
前記自車両情報と前記周辺車両情報とに基づいて、前記自車両と前記周辺車両とが交差した位置を新規交差位置として特定する特定手段と、
前記特定手段によって特定された前記新規交差位置を前記記憶手段に登録する登録手段と、
を更に備える、ことを特徴とする請求項1に記載の運転支援装置。
【請求項10】
前記周辺車両情報における前記周辺車両の走行軌跡は、前記周辺車両が通過した複数の通過点によって構成され、
前記登録手段は、前記複数の通過点のうち所定の条件を満たす通過点を前記新規交差位置に対応付けて前記記憶手段に登録し、
前記所定の条件は、通過点が前記新規交差位置から規定距離内にあるとの条件と、通過点を通過するときの前記周辺車両の方位と前記新規交差位置を通過するときの前記周辺車両の方向との差が閾値未満であるとの条件とを含む、ことを特徴とする請求項9に記載の運転支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転支援装置、運転支援方法、およびプログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
他車両(周辺車両)等との衝突を防止するための運転支援を、地図情報を使用せずに行う装置が知られている。特許文献1には、自車両の走行軌跡と他車両の走行軌跡とが交差した交差点の位置情報を記憶部に登録しておき、当該交差点を再び通過する際に自車両の運転支援を行う運転支援装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第7054636号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
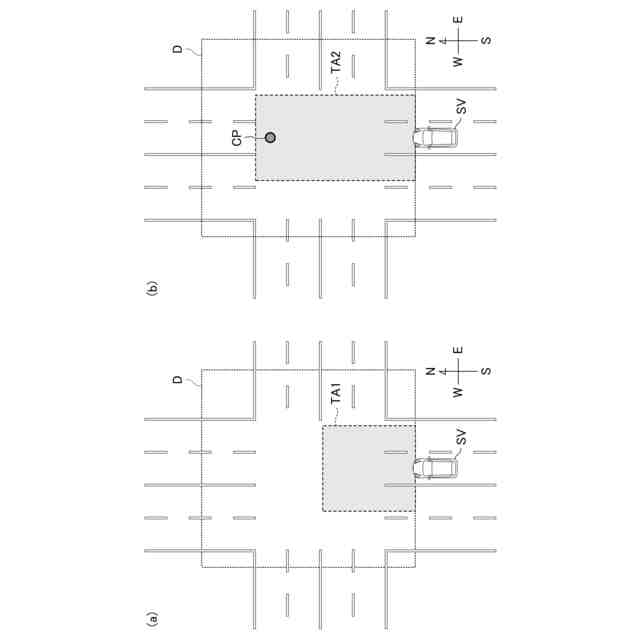
運転支援装置では、自車両の前方の対象領域内について自車両の衝突可能性を予測し、その予測結果に基づいて自車両の運転支援を行いうる。しかしながら、例えば複数車線を含む幹線道路に進入する場合などでは、過去において自車両の走行軌跡と他車両の走行軌跡とが交差した交差位置(交差点)が当該幹線道路に対して記憶されていても、運転支援が行われる対象領域内に当該交差位置が含まれず、適切に運転支援が行われないことがある。
【0005】
そこで、本発明は、自車両の運転支援を適切に行うことが可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の一側面としての運転支援装置は、過去において自車両の走行軌跡と他車両の走行軌跡とが交差した位置をそれぞれ示す複数の交差位置を記憶している記憶手段と、前記自車両の周辺に存在する周辺車両の現在位置、速度および走行軌跡を含む周辺車両情報を、車車間通信により前記周辺車両から取得する取得手段と、前記自車両の現在位置、速度および走行軌跡を含む自車両情報と、前記取得手段で取得された前記周辺車両情報とに基づいて、前記自車両の前方の対象領域内における前記自車両と前記周辺車両との衝突可能性を予測する予測手段と、前記予測手段での予測結果に基づいて、前記自車両の乗員への報知、および、前記自車両の減速支援のうち少なくとも1つを含む前記自車両の運転支援を行う支援手段と、を備え、前記予測手段は、前記記憶手段に記憶されている前記複数の交差位置のうち何れも前記自車両の前方の所定距離内に存在しない場合、前記対象領域を第1領域にして前記衝突可能性を予測し、前記記憶手段に記憶されている前記複数の交差位置のうち少なくとも1つの交差位置が前記所定距離内に存在する場合、前記対象領域を前記第1領域よりも大きい第2領域に設定して前記衝突可能性を予測する、ことを特徴とする。
【発明の効果】
【0007】
本発明によれば、例えば、自車両の運転支援を適切に行うことが可能な技術を提供することができる。
【図面の簡単な説明】
【0008】
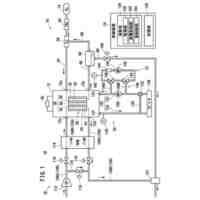
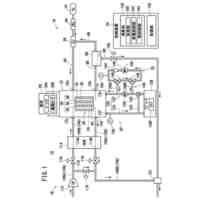
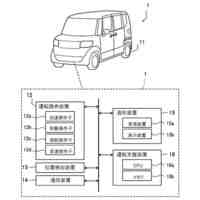
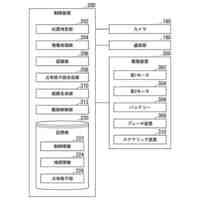
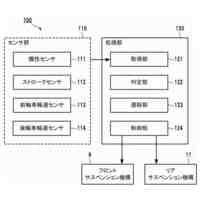
本発明に係る一実施形態の運転支援装置の構成例を示す図
交差位置データベースの構成例を示す図
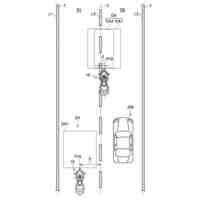
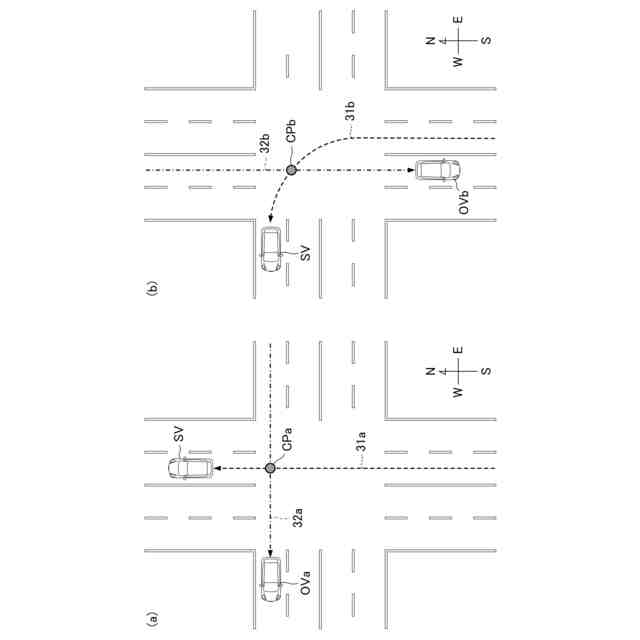
交差位置を説明するための図
従来の運転支援装置の課題を説明するための図
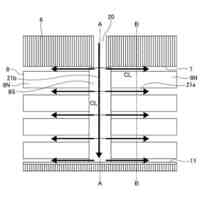
自車両の運転支援を行う対象領域の寸法の変更を説明するための図
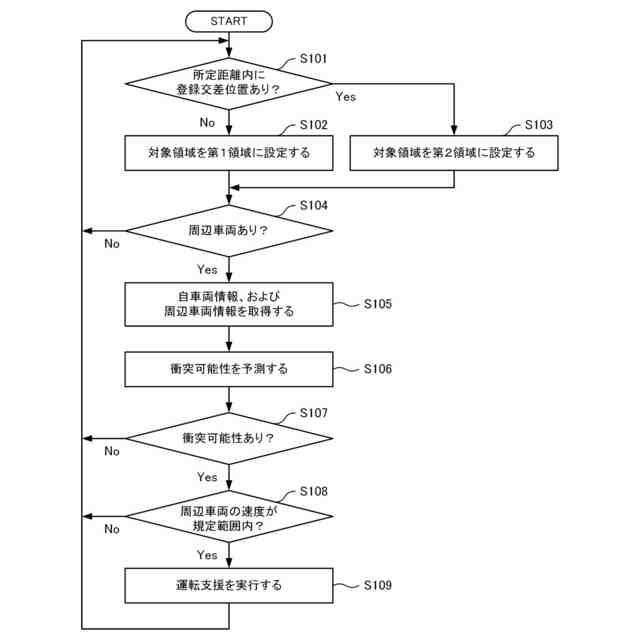
本発明に係る一実施形態の運転支援処理を示すフローチャート
自車両の衝突可能性を予測する方法(実施例1)を示すフローチャート
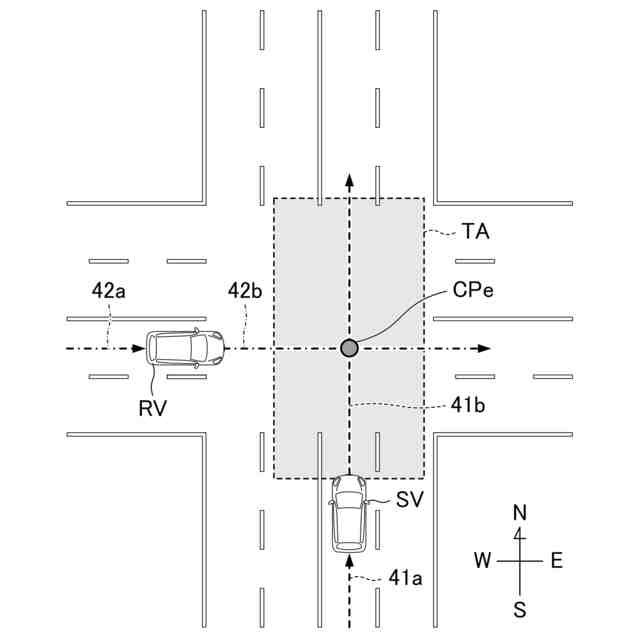
実施例1における衝突可能性の予測方法を説明するための図
周辺車両の速度と停止時間との関係を示す図
自車両の衝突可能性を予測する方法(実施例2)を示すフローチャート
実施例2における衝突可能性の予測方法を説明するための図
自車両の衝突可能性を予測する方法(実施例3)を示すフローチャート
実施例3における衝突可能性の予測方法を説明するための図
新規交差位置の登録方法を示すフローチャート
自車両と周辺車両との交差について説明するための図
周辺車両の走行軌跡(通過点)の登録について説明するための図
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図を参照しながら説明する。本発明は、以下の実施形態に限定されるものではなく、本発明の趣旨の範囲内での構成の変更や変形も含む。また、本実施形態で説明されている特徴の組み合わせの全てが本発明に必須のものとは限らない。なお、同一の構成要素には同一の参照番号を付して、その説明を省略する。
【0010】
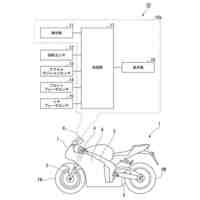
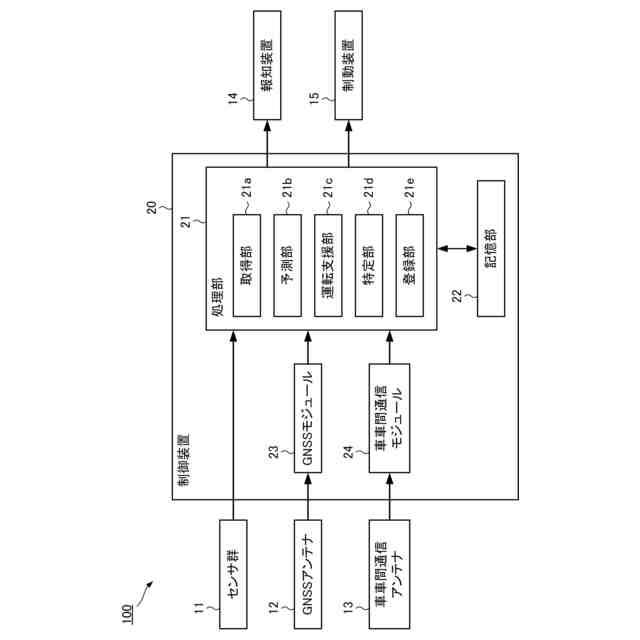
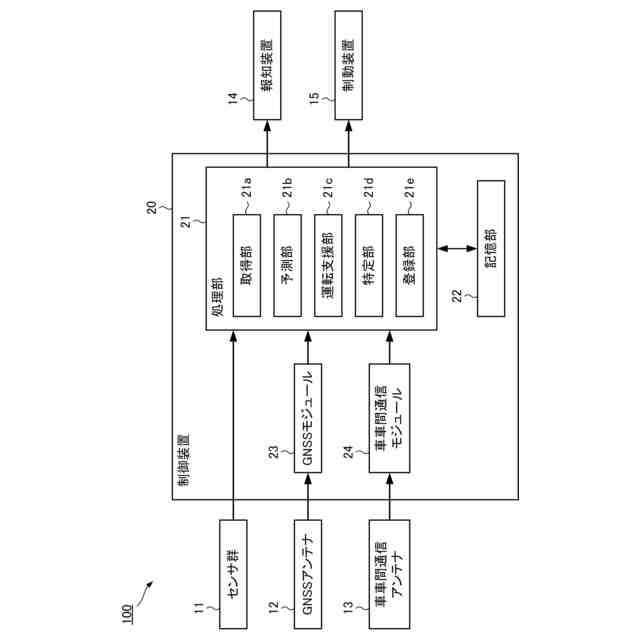
<運転支援装置の構成>
図1は、本発明に係る一実施形態の運転支援装置100の構成例を示す図である。運転支援装置100は、自車両の運転支援を行うために当該自車両に搭載される装置である。本実施形態の場合、運転支援装置100は、自車両の運転支援として、周辺車両との衝突を防止(低減)するための衝突防止支援を、地図情報を用いずに実行する。また、本実施形態の運転支援装置100は、センサ群11と、GNSS(Global Navigation Satellite System)アンテナ12と、車車間通信アンテナ13と、報知装置14と、制動装置15と、制御装置20とを備えうる。なお、以下の説明において、「他車両」は、自車両とは異なる車両全般を示しており、具体的には、自車両と車車間通信が行われた車両として定義されうる。また、「周辺車両」は、現在において自車両の周辺に存在する車両を示しており、具体的には、現在において自車両と車車間通信が行われている車両として定義される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両
4日前
本田技研工業株式会社
車両
4日前
本田技研工業株式会社
車両
4日前
本田技研工業株式会社
車両
4日前
本田技研工業株式会社
電動車両
4日前
本田技研工業株式会社
排気装置
4日前
本田技研工業株式会社
触媒構造
4日前
本田技研工業株式会社
排気装置
4日前
本田技研工業株式会社
回転電機
4日前
本田技研工業株式会社
回転電機
今日
本田技研工業株式会社
鞍乗り型車両
4日前
本田技研工業株式会社
鞍乗り型車両
今日
本田技研工業株式会社
燃料電池システム
4日前
本田技研工業株式会社
燃料電池システム
4日前
本田技研工業株式会社
車両用前照灯装置
4日前
本田技研工業株式会社
燃料製造システム
今日
本田技研工業株式会社
車両用前照灯装置
4日前
本田技研工業株式会社
チェーンスプロケット
4日前
本田技研工業株式会社
運転支援装置及び運転支援方法
4日前
本田技研工業株式会社
鞍乗型車両の電装部品支持構造
4日前
本田技研工業株式会社
運転支援装置及び運転支援方法
4日前
本田技研工業株式会社
コイル分離方法及びコイル分離装置
今日
本田技研工業株式会社
運転支援装置、方法およびプログラム。
4日前
本田技研工業株式会社
制御装置、制御方法、およびプログラム
4日前
本田技研工業株式会社
運転支援装置および運転支援を行う方法
4日前
本田技研工業株式会社
運転支援装置、方法およびプログラム。
4日前
本田技研工業株式会社
電力供給システム、及び電力供給管理装置
4日前
本田技研工業株式会社
燃料電池用セパレータおよび燃料電池スタック
4日前
本田技研工業株式会社
運転支援装置、運転支援方法、およびプログラム
4日前
本田技研工業株式会社
運転支援装置、運転支援方法、およびプログラム
4日前
本田技研工業株式会社
車両用制御装置、車両制御方法、およびプログラム
4日前
本田技研工業株式会社
車両用制御装置、車両制御方法、およびプログラム
4日前
本田技研工業株式会社
制御システム、鞍乗型車両、制御方法、およびプログラム
4日前
本田技研工業株式会社
昇温システム
4日前
本田技研工業株式会社
昇温システム
4日前
本田技研工業株式会社
表示システム、鞍乗り型車両、速度計、携帯端末及びプログラム
4日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ