TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025060226
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170821
出願日
2023-09-29
発明の名称
運転支援装置および運転支援を行う方法
出願人
本田技研工業株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
B60W
30/16 20200101AFI20250403BHJP(車両一般)
要約
【課題】ACCにおける走行の安定化に有利な運転支援を比較的簡便に実現する。
【解決手段】本発明に係る運転支援装置は、鞍乗型車両に搭載可能な運転支援装置であって、前記鞍乗型車両の車速を検出する第1の検出手段と、前記鞍乗型車両の前方を走行する前走車を検出する第2の検出手段と、前記鞍乗型車両の加速制御および制動制御を行う制御手段と、を備え、前記鞍乗型車両の車速が基準より低い場合、前記制御手段は、前記加速制御を前記制動制御と同時に行うことにより前記前走車に対する追従走行を行う。
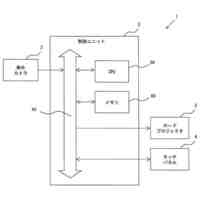
【選択図】図1
特許請求の範囲
【請求項1】
鞍乗型車両に搭載可能な運転支援装置であって、
前記鞍乗型車両の車速を検出する第1の検出手段と、
前記鞍乗型車両の前方を走行する前走車を検出する第2の検出手段と、
前記鞍乗型車両の加速制御および制動制御を行う制御手段と、を備え、
前記鞍乗型車両の車速が基準より低い場合、前記制御手段は、前記加速制御を前記制動制御と同時に行うことにより前記前走車に対する追従走行を行う
ことを特徴とする運転支援装置。
続きを表示(約 1,300 文字)
【請求項2】
前記鞍乗型車両の車速が前記基準より低い場合、前記制御手段は、該車速が低くなるほど前記加速制御の制御量および前記制動制御の制御量の双方を大きくする
ことを特徴とする請求項1記載の運転支援装置。
【請求項3】
前記鞍乗型車両の車速が前記基準より低い場合であって、前記前走車が減速したことが前記検出手段により検出された場合、前記制御手段は、前記加速制御を抑制して前記制動制御の制御量を大きくする
ことを特徴とする請求項1記載の運転支援装置。
【請求項4】
その後、前記前走車が加速したことが前記検出手段により検出された場合、前記制御手段は、前記制動制御の制御量を維持しつつ前記加速制御の制御量を大きくする
ことを特徴とする請求項3記載の運転支援装置。
【請求項5】
前記鞍乗型車両の車速が前記基準より低い場合であって、前記前走車が加速したことが前記検出手段により検出され且つ其の加速度が所定値より大きい場合、前記制御手段は、前記鞍乗型車両の車速が前記基準に達するまでの間、前記前走車の加速度より小さい加速度で前記鞍乗型車両を加速させる
ことを特徴とする請求項1記載の運転支援装置。
【請求項6】
前記鞍乗型車両の車速が前記基準より低い場合であって、前記前走車が加速したことが前記検出手段により検出され且つ其の加速度が所定値より小さい場合、前記制御手段は、前記鞍乗型車両の車速が前記基準に達するまでの間、前記制動制御の制御量を維持しつつ前記加速制御の制御量を大きくすることにより前記鞍乗型車両を加速させる
ことを特徴とする請求項1記載の運転支援装置。
【請求項7】
前記鞍乗型車両を発進させるための操作入力を取得する取得手段を更に備え、
前記制御手段は、前記鞍乗型車両が停止状態となった場合には前記加速制御および前記制動制御を中断し、前記操作入力に応答して該中断された加速制御および制動制御を再開する
ことを特徴とする請求項1記載の運転支援装置。
【請求項8】
前記基準は、時速30キロメートルである
ことを特徴とする請求項1記載の運転支援装置。
【請求項9】
前記制御手段は、
前記鞍乗型車両の動力源を制御して前記加速制御を行い、
前記鞍乗型車両の制動装置を制御して前記制動制御を行う、
ように前記動力源および前記制動装置のそれぞれに対して制御信号を出力する
ことを特徴とする請求項1から請求項8の何れか1項記載の運転支援装置。
【請求項10】
鞍乗型車両の運転支援を行う方法であって、
前記鞍乗型車両の車速を検出するステップと、
前記鞍乗型車両の前方を走行する前走車を検出するステップと、
前記鞍乗型車両の加速制御および制動制御を行うステップと、を備え、
前記鞍乗型車両の車速が基準より低い場合、前記制御するステップでは、前記加速制御を前記制動制御と同時に行うことにより前記前走車に対する追従走行を行う
ことを特徴とする方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、主に車載用運転支援装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
運転操作の一部/全部を支援する運転支援の一態様として、前走車に追従するように自車両の運転支援を行うものがあり、そのような技術はACC(アダプティブクルーズコントロール)等と称されうる。
【先行技術文献】
【特許文献】
【0003】
国際公開第2023/067705号
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記ACCにおいては前走車の車速が不測に/自車両に関わらず変動することが考えられる。特許文献1には、自動二輪車の旋回走行中に前輪ブレーキ及び後輪ブレーキを個別に制御して車体挙動を安定化させることが記載されているが、前走車との関係については何ら考慮されていない。
【0005】
本発明は、上記課題の認識を契機として成されたものであり、ACCにおける走行の安定化に有利な運転支援を比較的簡便に実現することを例示的目的とする。
【課題を解決するための手段】
【0006】
本発明の一つの側面は運転支援装置に係り、前記運転支援装置は、
鞍乗型車両に搭載可能な運転支援装置であって、
前記鞍乗型車両の車速を検出する第1の検出手段と、
前記鞍乗型車両の前方を走行する前走車を検出する第2の検出手段と、
前記鞍乗型車両の加速制御および制動制御を行う制御手段と、を備え、
前記鞍乗型車両の車速が基準より低い場合、前記制御手段は、前記加速制御を前記制動制御と同時に行うことにより前記前走車に対する追従走行を行う
ことを特徴とする。
【発明の効果】
【0007】
本発明によれば、ACCにおける走行の安定化に有利な運転支援を実現可能となる。
【図面の簡単な説明】
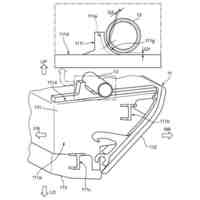
【0008】
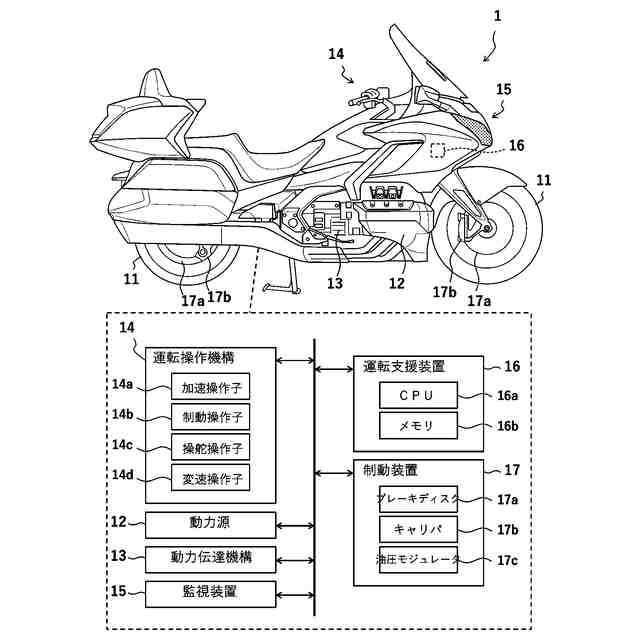
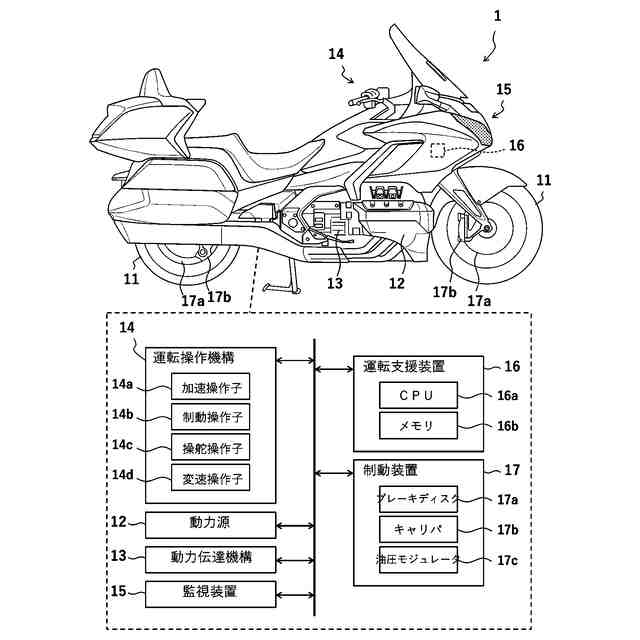
実施形態に係る鞍乗型車両の構成例を示す図である。
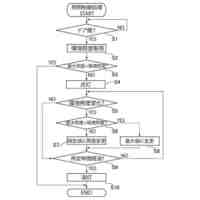
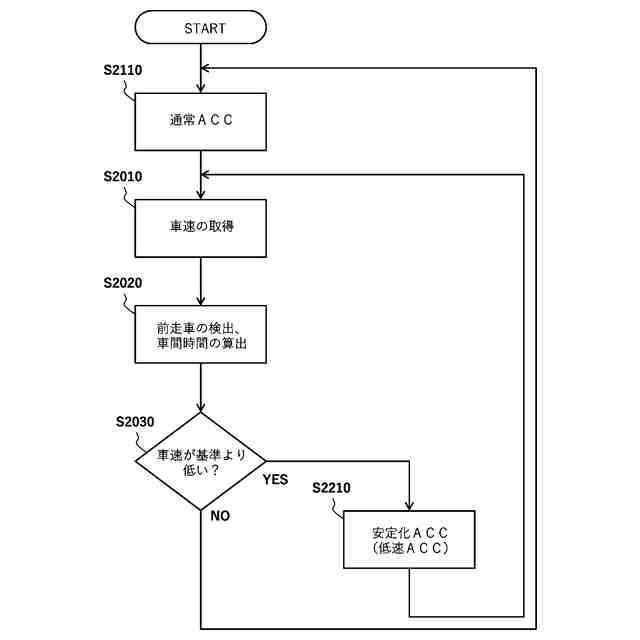
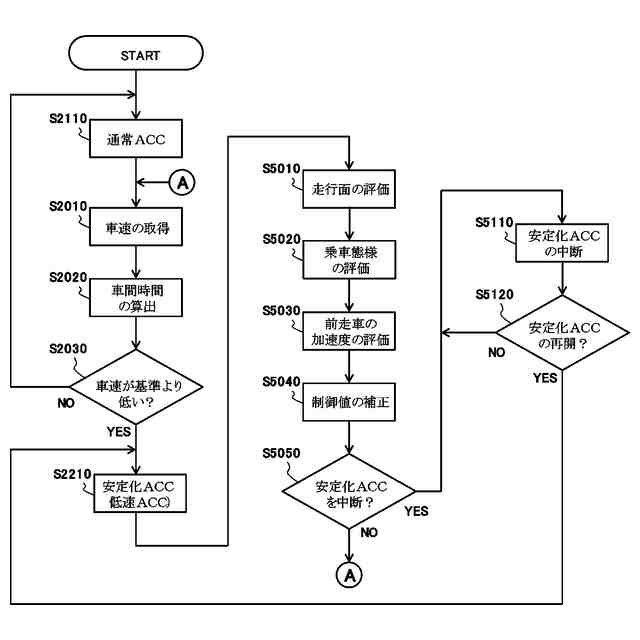
運転支援装置による運転支援の概要を示すフローチャートである。
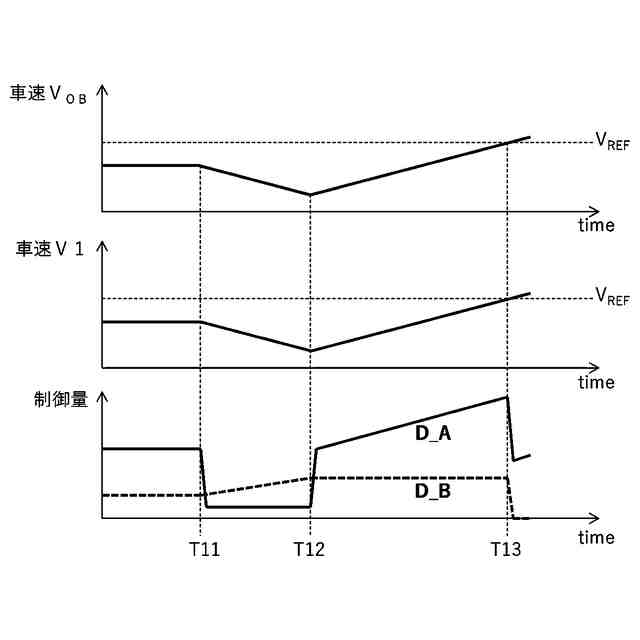
安定化ACCの制御内容の例を説明するためのタイミングチャートである。
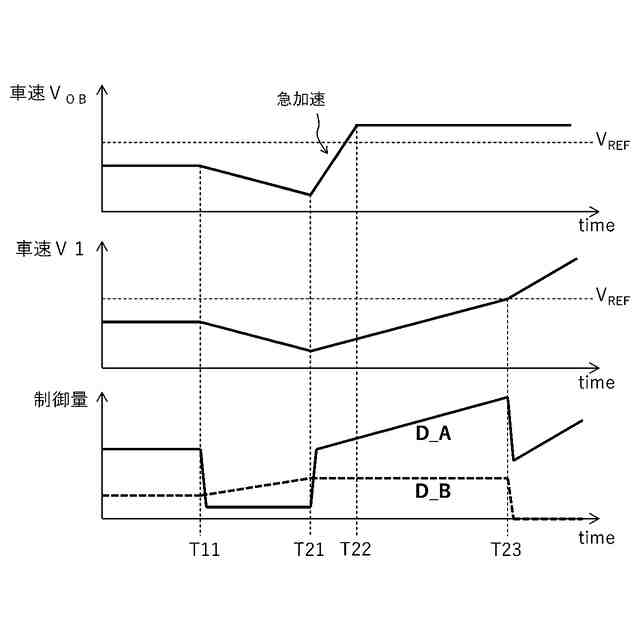
安定化ACCの制御内容の例を説明するためのタイミングチャートである。
運転支援装置による運転支援の詳細内容を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものでなく、また実施形態で説明されている特徴の組み合わせの全てが発明に必須のものとは限らない。実施形態で説明されている複数の特徴のうち二つ以上の特徴が任意に組み合わされてもよい。また、同一若しくは同様の構成には同一の参照番号を付し、重複した説明は省略する。
【0010】
図1は、実施形態に係る鞍乗型車両1の構成例を示す。鞍乗型車両1は、本実施形態においては車輪11として前輪および後輪を備える二輪車とするが、車輪の数量は本例に限られるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
1か月前
個人
眼科手術車
3か月前
個人
小型EVシステム
今日
個人
授乳用車両
2か月前
日本精機株式会社
ケース
6日前
日本精機株式会社
表示装置
13日前
日本精機株式会社
表示装置
13日前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
1か月前
個人
アンチロール制御装置
20日前
日本精機株式会社
表示装置
1か月前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
照明装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
株式会社松華
懸架装置
1か月前
個人
ブレーキシステム
11日前
個人
台車用車輪止め具
3か月前
個人
自走式立体型洗車場
28日前
個人
ステージカー
1か月前
横浜ゴム株式会社
タイヤ
10日前
日本精機株式会社
車両用表示装置
1か月前
井関農機株式会社
作業車両
18日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
2か月前
マツダ株式会社
車両
2か月前
帝国繊維株式会社
作業車両
5日前
マツダ株式会社
車両
1か月前
マツダ株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
1か月前
株式会社ユーシン
照明装置
13日前
株式会社青木製作所
タンクローリ
3か月前
日本精機株式会社
車両用照明装置
2か月前
トヨタ自動車株式会社
車両
3か月前
スズキ株式会社
車両制御装置
7日前
コイト電工株式会社
座席装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ