TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059288
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169287
出願日
2023-09-29
発明の名称
制御装置、制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250403BHJP(制御;調整)
要約
【課題】移動体の現在地から目的地までの経路を適切に生成すること。
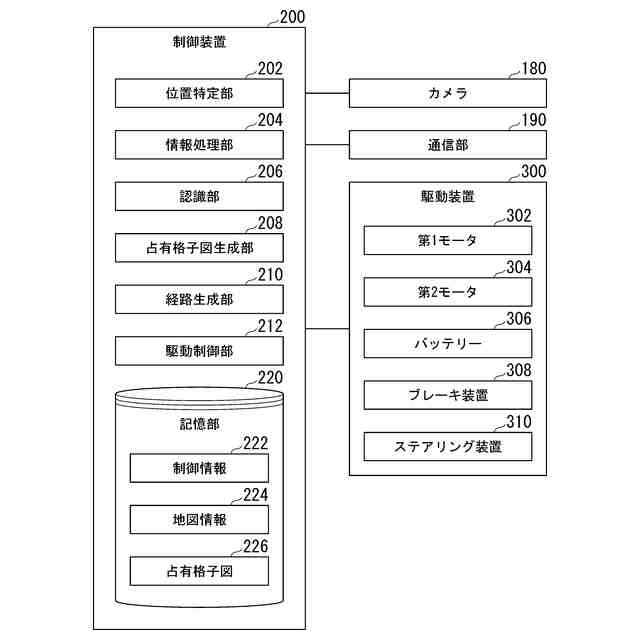
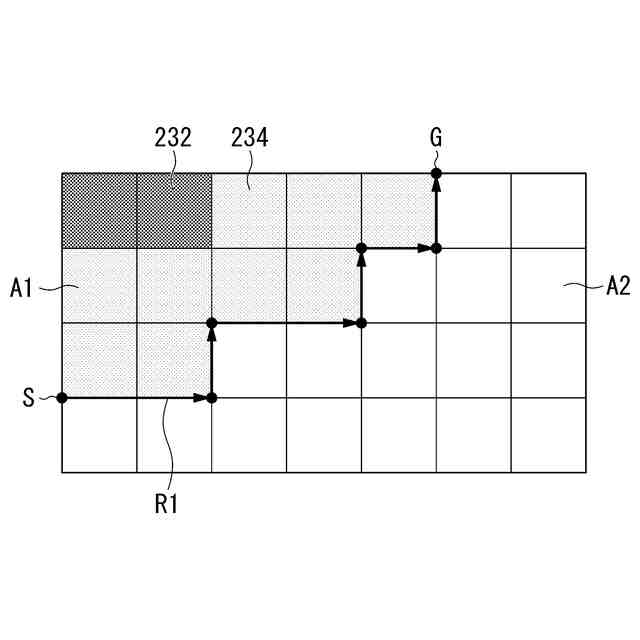
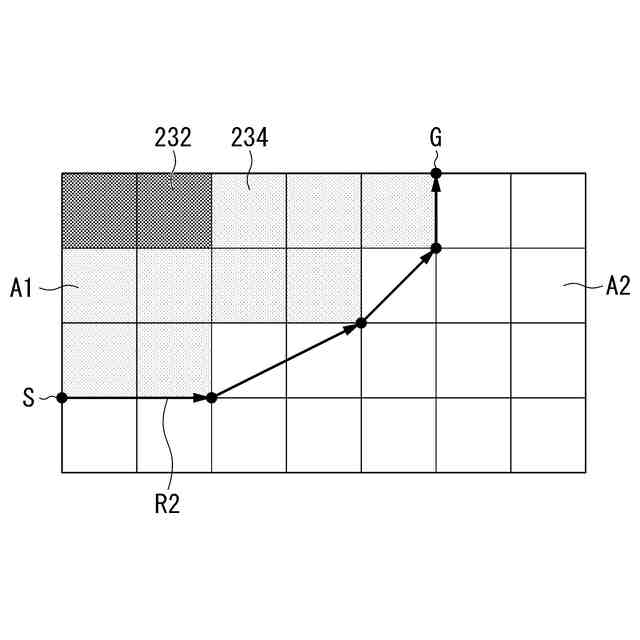
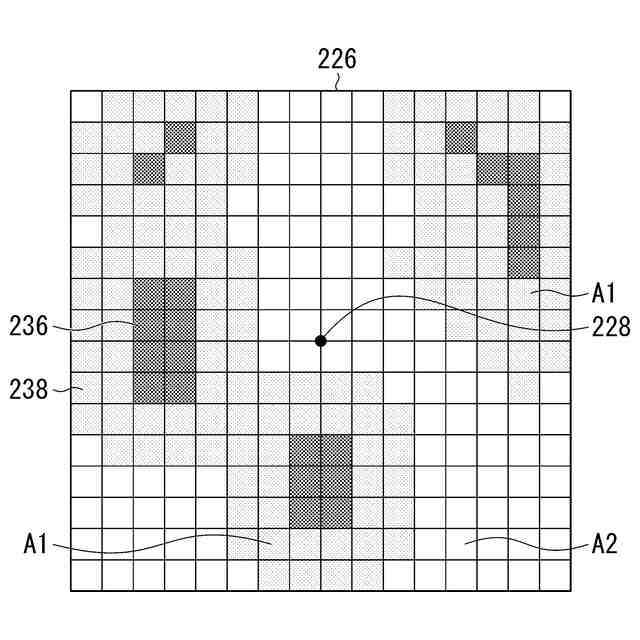
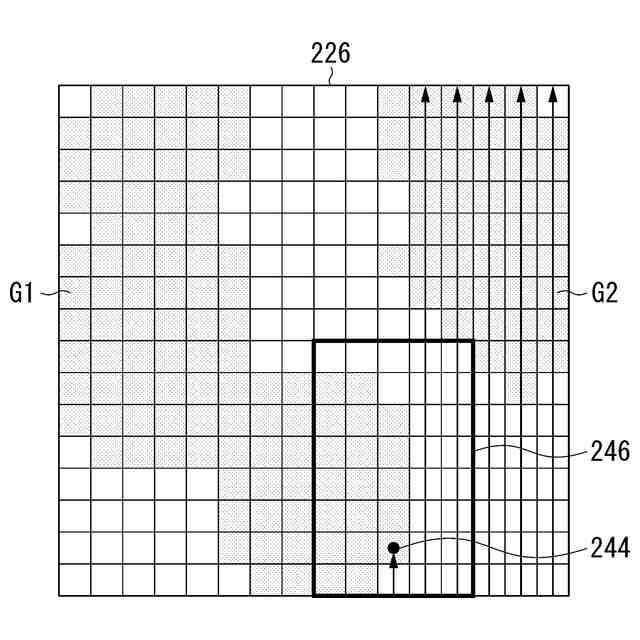
【解決手段】移動体の周辺の状況が撮像された画像に基づいて、前記移動体の周辺に存在する物体の位置を認識する認識部と、前記移動体の周辺に存在する物体の位置に基づいて、複数の格子を含む占有格子図を生成する占有格子図生成部と、前記占有格子図において示される物体の輪郭に基づいて、前記移動体が進むべき経路を生成する経路生成部と、を備え、前記占有格子図生成部は、前記移動体の周辺に存在する物体の位置に基づいて、前記占有格子図における複数の格子の各々に対して、物体が存在するか否かを判定し、物体が存在すると判定された格子を含む第1領域の輪郭を示す第1輪郭を生成し、前記第1輪郭よりも頂点数が少なく前記第1領域を包含する第2輪郭を、前記物体の輪郭として生成する、制御装置。
【選択図】図3
特許請求の範囲
【請求項1】
移動体の周辺の状況が撮像された画像に基づいて、前記移動体の周辺に存在する物体の位置を認識する認識部と、
前記移動体の周辺に存在する物体の位置に基づいて、複数の格子を含む占有格子図を生成する占有格子図生成部と、
前記占有格子図において示される物体の輪郭に基づいて、前記移動体が進むべき経路を生成する経路生成部と、を備え、
前記占有格子図生成部は、
前記移動体の周辺に存在する物体の位置に基づいて、前記占有格子図における複数の格子の各々に対して、物体が存在するか否かを判定し、
物体が存在すると判定された格子を含む第1領域の輪郭を示す第1輪郭を生成し、
前記第1輪郭よりも頂点数が少なく前記第1領域を包含する第2輪郭を、前記物体の輪郭として生成する、
制御装置。
続きを表示(約 1,800 文字)
【請求項2】
前記経路生成部は、前記占有格子図における前記第2輪郭に囲まれない領域である第2領域において前記移動体が進むべき経路を生成し、
前記経路に沿って前記移動体が移動するよう、前記移動体を駆動する駆動装置を制御する駆動制御部を更に備える、
請求項1に記載の制御装置。
【請求項3】
前記占有格子図生成部は、
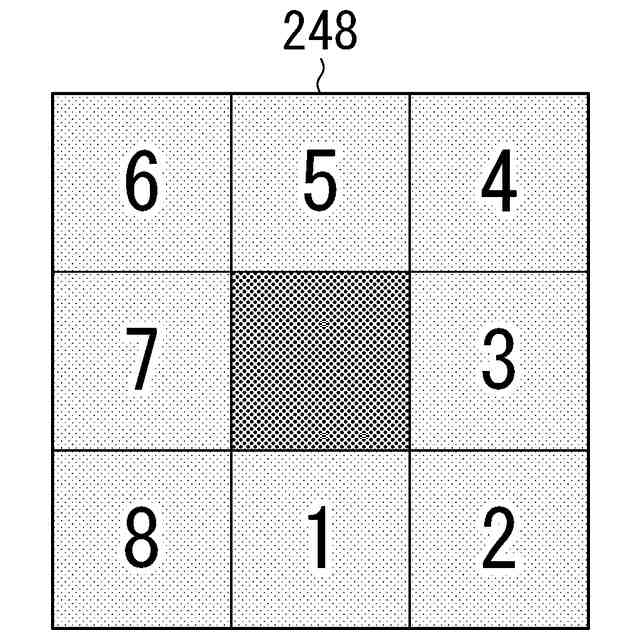
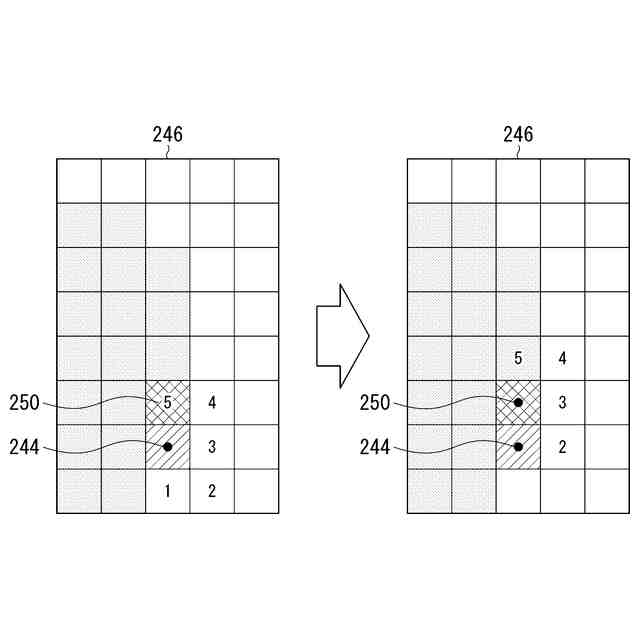
前記第1輪郭に含まれる複数の頂点の中から第1頂点を選択し、
前記第1頂点を中心とした第1範囲内における前記第1領域の占める割合に基づいて、前記第1頂点を前記第1輪郭から削除するか否かを判定する、
請求項1に記載の制御装置。
【請求項4】
前記占有格子図生成部は、
前記割合が第1閾値以上である場合、前記第1頂点を前記第1輪郭から削除し、
前記割合が前記第1閾値未満である場合、前記第1頂点を前記第1輪郭から削除しない、
請求項3に記載の制御装置。
【請求項5】
前記占有格子図生成部は、
前記第1頂点が削除された前記第1輪郭に含まれる複数の頂点の中から第2頂点を選択し、
前記第2頂点から前記第2頂点と隣接する2つの頂点に伸ばした2つの線分によって形成される角度および前記2つの線分の長さの合計に基づいて、前記第2頂点を前記第1輪郭から削除するか否かを判定する、
請求項3に記載の制御装置。
【請求項6】
前記占有格子図生成部は、
前記角度と180度との差が第2閾値未満であり、かつ、前記2つの線分の長さの合計が第3閾値以上である場合、前記第2頂点を前記第1輪郭から削除する、
請求項5に記載の制御装置。
【請求項7】
前記占有格子図生成部は、
前記第2頂点が削除された前記第1輪郭に含まれる複数の頂点の中から第3頂点を選択し、
前記占有格子図における前記移動体の位置から前記第3頂点までのユークリッド距離に基づいて、前記第3頂点を前記第1輪郭から削除するか否かを判定する、
請求項5に記載の制御装置。
【請求項8】
前記占有格子図生成部は、
前記第1領域の複数の頂点を凸包で接続することにより前記第1輪郭を生成し、
前記第1輪郭に含まれる複数の直線の各々に対応する複数の平行線を生成し、
前記複数の平行線を接続することで前記第1領域を膨張させ、
膨張させた前記第1領域を凹包で接続することにより、前記第2輪郭を生成する、
請求項1に記載の制御装置。
【請求項9】
コンピュータが、
移動体の周辺の状況が撮像された画像に基づいて、前記移動体の周辺に存在する物体の位置を認識し、
前記移動体の周辺に存在する物体の位置に基づいて、複数の格子を含む占有格子図を生成し、
前記占有格子図において示される物体の輪郭に基づいて、前記移動体が進むべき経路を生成し、
前記移動体の周辺に存在する物体の位置に基づいて、前記占有格子図における複数の格子の各々に対して、物体が存在するか否かを判定し、
物体が存在すると判定された格子を含む第1領域の輪郭を示す第1輪郭を生成し、
前記第1輪郭よりも頂点数が少なく前記第1領域を包含する第2輪郭を、前記物体の輪郭として生成する、
制御方法。
【請求項10】
コンピュータに、
移動体の周辺の状況が撮像された画像に基づいて、前記移動体の周辺に存在する物体の位置を認識する処理と、
前記移動体の周辺に存在する物体の位置に基づいて、複数の格子を含む占有格子図を生成する処理と、
前記占有格子図において示される物体の輪郭に基づいて、前記移動体が進むべき経路を生成する処理と、
前記移動体の周辺に存在する物体の位置に基づいて、前記占有格子図における複数の格子の各々に対して、物体が存在するか否かを判定する処理と、
物体が存在すると判定された格子を含む第1領域の輪郭を示す第1輪郭を生成する処理と、
前記第1輪郭よりも頂点数が少なく前記第1領域を包含する第2輪郭を、前記物体の輪郭として生成する処理と、
を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御方法、およびプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、予め設定された目的地まで自律的に移動する移動体が知られている。また、障害物等の物体との距離を感知して確率的に分布する格子点からなる占有率格子地図を作成し、移動体の半径または大きさに基づき占有率格子地図内の物体の厚さを厚くすることにより構成空間地図を作成する技術が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2008-47095号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術では、移動体の現在地から目的地までの経路を適切に生成できない場合があった。
【0005】
本発明は、このような事情を考慮してなされたものであり、移動体の現在地から目的地までの経路を適切に生成することができる情報処理システムを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る制御装置、制御方法、およびプログラムは、以下の構成を採用した。
(1):この発明の一態様に係る制御装置は、移動体の周辺の状況が撮像された画像に基づいて、前記移動体の周辺に存在する物体の位置を認識する認識部と、前記移動体の周辺に存在する物体の位置に基づいて、複数の格子を含む占有格子図を生成する占有格子図生成部と、前記占有格子図において示される物体の輪郭に基づいて、前記移動体が進むべき経路を生成する経路生成部と、を備え、前記占有格子図生成部は、前記移動体の周辺に存在する物体の位置に基づいて、前記占有格子図における複数の格子の各々に対して、物体が存在するか否かを判定し、物体が存在すると判定された格子を含む第1領域の輪郭を示す第1輪郭を生成し、前記第1輪郭よりも頂点数が少なく前記第1領域を包含する第2輪郭を、前記物体の輪郭として生成する、制御装置である。
【0007】
(2):上記(1)の態様において、前記経路生成部は、前記占有格子図における前記第2輪郭に基づき、前記第1領域を含まない第2領域において前記移動体が進むべき経路を生成し、前記制御装置は、前記経路に沿って前記移動体が移動するよう、前記移動体を駆動する駆動装置を制御する駆動制御部を更に備えるものである。
【0008】
(3):上記(1)の態様において、前記占有格子図生成部は、前記第1輪郭に含まれる複数の頂点の中から第1頂点を選択し、前記第1頂点を中心とした第1範囲内における前記第1領域の占める割合に基づいて、前記第1頂点を前記第1輪郭から削除するか否かを判定するものである。
【0009】
(4):上記(3)の態様において、前記占有格子図生成部は、前記割合が第1閾値以上である場合、前記第1頂点を前記第1輪郭から削除し、前記割合が前記第1閾値未満である場合、前記第1頂点を前記第1輪郭から削除しないものである。
【0010】
(5):上記(3)の態様において、前記占有格子図生成部は、前記第1頂点が削除された前記第1輪郭に含まれる複数の頂点の中から第2頂点を選択し、前記第2頂点から前記第2頂点と隣接する2つの頂点に伸ばした2つの線分によって形成される角度および前記2つの線分の長さの合計に基づいて、前記第2頂点を前記第1輪郭から削除するか否かを判定するものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
回転電機
1日前
本田技研工業株式会社
鞍乗り型車両
1日前
本田技研工業株式会社
燃料製造システム
1日前
本田技研工業株式会社
コイル分離方法及びコイル分離装置
1日前
本田技研工業株式会社
行動確率推定装置及び交通安全支援システム
今日
本田技研工業株式会社
昇温システム
5日前
本田技研工業株式会社
昇温システム
5日前
本田技研工業株式会社
ロボット遠隔操作システム、ロボット遠隔操作方法、及びプログラム
1日前
本田技研工業株式会社
ロボット遠隔操作システム、ロボット遠隔操作方法、及びプログラム
1日前
本田技研工業株式会社
回転電機コアおよびこれを用いた回転電機ならびに回転電機コアの製造方法
1日前
本田技研工業株式会社
移動体の制御装置、移動体の制御方法、およびプログラム
5日前
エイブリック株式会社
基準電圧回路
5日前
和研工業株式会社
多連レバー機構
18日前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
8日前
株式会社ダイフク
搬送車
8日前
ローム株式会社
半導体集積回路
13日前
株式会社豊田自動織機
荷役車両
2か月前
エイブリック株式会社
ボルテージレギュレータ
5日前
株式会社シンテックホズミ
搬送ロボット
1か月前
トヨタ自動車株式会社
工作機械の制御装置
7日前
トヨタ自動車株式会社
工作機械の制御装置
6日前
愛知機械テクノシステム株式会社
無人搬送車
27日前
国立大学法人広島大学
モデル誤差抑制補償器
1か月前
株式会社ダイフク
物品搬送設備
6日前
株式会社ダイフク
物品搬送設備
1か月前
アズビル株式会社
制御システムおよび制御方法
28日前
アズビル株式会社
制御システムおよび制御方法
19日前
アズビル株式会社
制御システムおよび制御方法
19日前
日本精工株式会社
制御装置および制御方法
25日前
トヨタ自動車株式会社
自律走行装置
1か月前
株式会社ダイヘン
搬送車
5日前
株式会社ダイヘン
搬送車
5日前
株式会社ダイヘン
搬送車
5日前
株式会社ダイヘン
搬送車
5日前
チームラボ株式会社
走行システム及び走行路
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ