TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025056964
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023166526
出願日
2023-09-27
発明の名称
ロボットの制御方法、システム、物品の製造方法、プログラム、記録媒体
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B25J
13/08 20060101AFI20250401BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットの制御において、2つの物体を適切な目標位置関係にする上で有利な技術が求められていた。
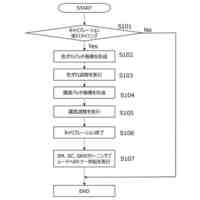
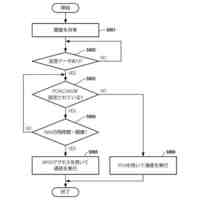
【解決手段】コンピュータが、ロボットに保持された第1物体と、第2物体と、の位置関係を反映した現在画像を取得し、前記現在画像に基づいて、前記第1物体と前記第2物体が基準位置関係にあると判定したら、前記第1物体と前記第2物体が目標位置関係になるように、前記判定の前に設定された前記ロボットの動作または前記現在画像の取得の後にユーザから指示された前記ロボットの動作に従って、前記ロボットの位置姿勢を制御する、ことを特徴とするロボットの制御方法である。
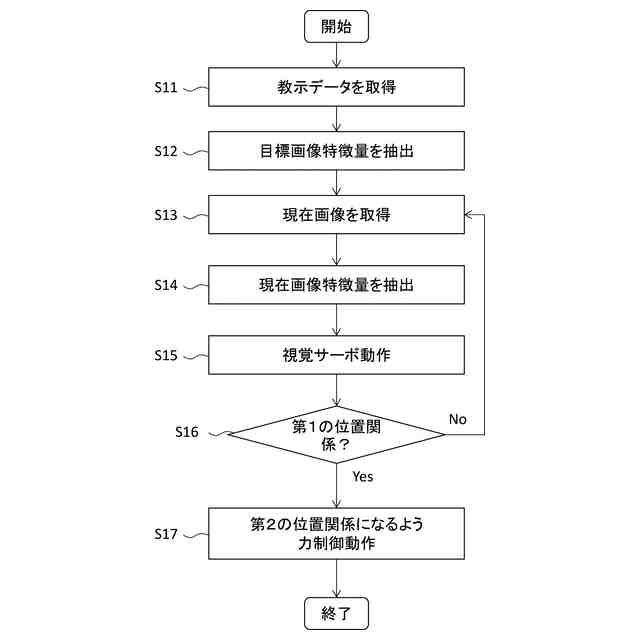
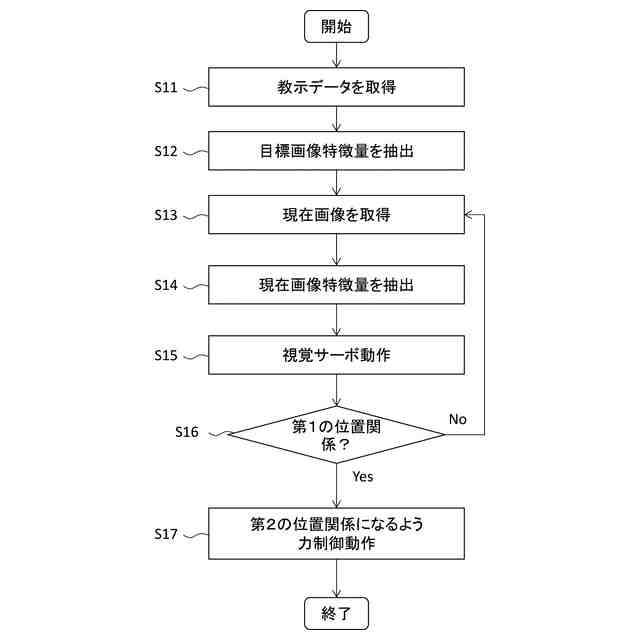
【選択図】図5
特許請求の範囲
【請求項1】
コンピュータが、ロボットに保持された第1物体と、第2物体と、の位置関係を反映した現在画像を取得し、前記現在画像に基づいて、前記第1物体と前記第2物体が基準位置関係にあると判定したら、
前記第1物体と前記第2物体が目標位置関係になるように、前記判定の前に設定された前記ロボットの動作または前記現在画像の取得の後にユーザから指示された前記ロボットの動作に従って、前記ロボットの位置姿勢を制御する、
ことを特徴とするロボットの制御方法。
続きを表示(約 1,000 文字)
【請求項2】
前記現在画像には、前記第1物体と前記第2物体の両方が撮像されている、
ことを特徴とする請求項1に記載のロボットの制御方法。
【請求項3】
前記コンピュータは、前記現在画像から、前記第1物体の部位と前記第2物体の部位との位置関係に応じた画像特徴量を取得し、前記画像特徴量に基づいて前記判定を行う、
ことを特徴とする請求項1に記載のロボットの制御方法。
【請求項4】
前記ロボットの位置姿勢の前記制御では、前記判定の前に設定された前記ロボットの軌道に従って、前記ロボットの位置姿勢を変更する、
ことを特徴とする請求項1に記載のロボットの制御方法。
【請求項5】
前記コンピュータが、前記第1物体と前記第2物体が前記基準位置関係にあると判定したら、前記第1物体と前記第2物体が前記目標位置関係になるように、力制御により前記ロボットを制御する、
ことを特徴とする請求項1に記載のロボットの制御方法。
【請求項6】
前記コンピュータが、前記第1物体と前記第2物体が前記基準位置関係にあると判定したら、前記第1物体と前記第2物体が前記目標位置関係になるように、位置制御により前記ロボットを制御する、
ことを特徴とする請求項1に記載のロボットの制御方法。
【請求項7】
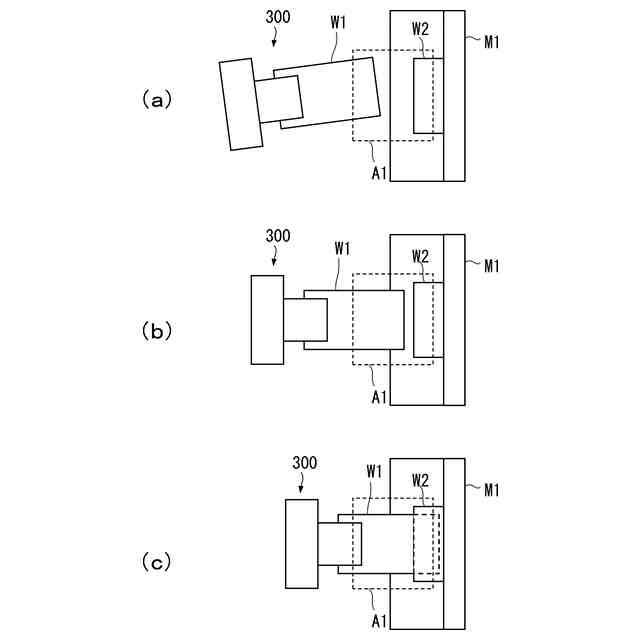
前記基準位置関係では、前記第1物体と前記第2物体は離間しており、
前記目標位置関係では、前記第1物体と前記第2物体が接触している、
ことを特徴とする請求項1に記載のロボットの制御方法。
【請求項8】
前記現在画像を撮像するための撮像部が前記ロボットの位置姿勢の変化に伴って動くように配置されている、
ことを特徴とする請求項2に記載のロボットの制御方法。
【請求項9】
前記第1物体と前記第2物体が前記基準位置関係になるように、視覚サーボによって前記ロボットの位置姿勢を制御する、
ことを特徴とする請求項1に記載のロボットの制御方法。
【請求項10】
前記コンピュータは、前記ロボットに保持された第1教示用物体と、第2教示用物体と、が前記基準位置関係にあることを反映した参照画像を取得し、前記現在画像と前記参照画像とを用いて、前記第1物体と前記第2物体が前記基準位置関係にあるかを判定する、
ことを特徴とする請求項1に記載のロボットの制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットの制御方法、等に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
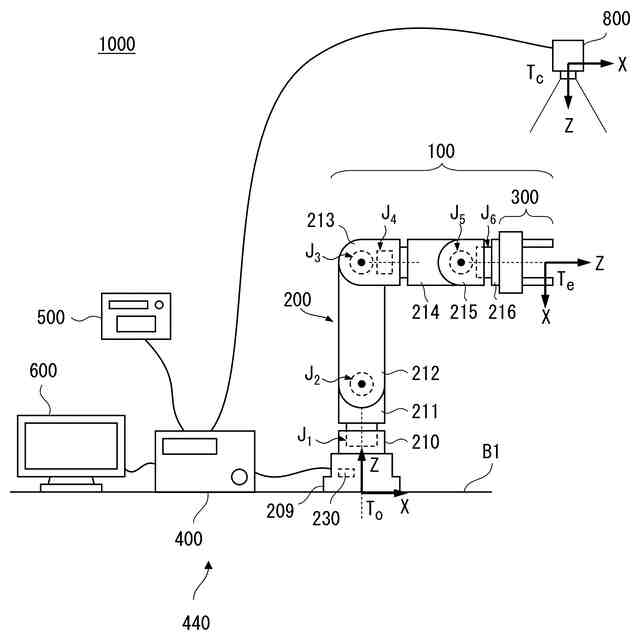
生産現場をはじめとする様々な分野において、ロボットの導入が進んでいる。ロボットの位置・姿勢を制御する一つの方法として、目標物の位置の変化を視覚情報として計測し、それをフィードバック情報として用いる視覚サーボが知られている。
【0003】
特許文献1には、視覚情報に基づく視覚サーボ制御の出力と、力検出結果に基づく力制御の出力を、目標位置からの距離に応じて異なる割合で足し合わせて制御を行うロボット制御装置が開示されている。
【0004】
特許文献2には、力制御系を視覚サーボ系に組み込み、対象物にかかる負荷情報と、対象物と被組付け部品の位置関係の、両方の情報に基づいてロボットを制御する制御装置が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2015-74058号公報
特開2013-180380号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
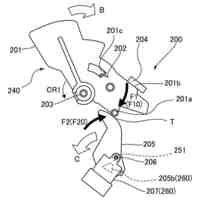
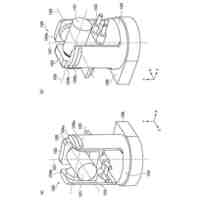
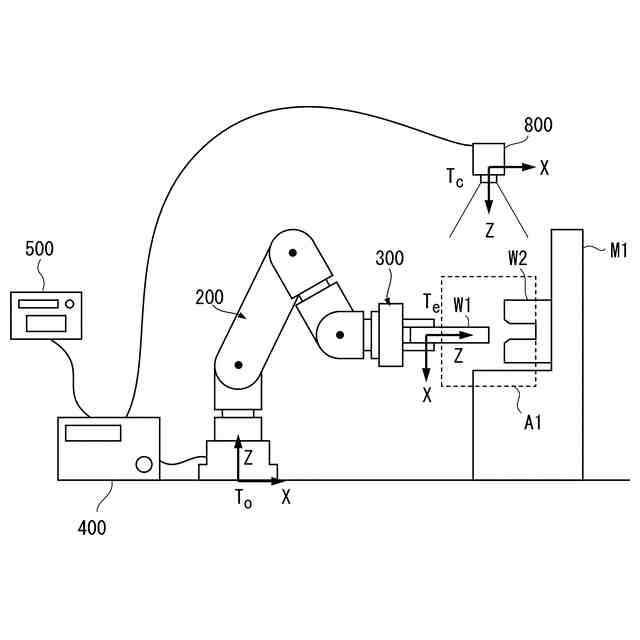
例えば、ロボットハンドに部品1を把持させ、部品1を部品2に組み付ける作業を行わせる場合に、従来の制御方法によりロボットを制御したのでは、組み付け作業が正しく行われない場合があった。具体的には、ロボットハンドが部品1を把持して移動する間に、部品1と部品2の相対位置に意図しないずれが発生した場合には、教示した軌道にしたがってロボットハンドを移動させても正しく組み付けられない場合があった。
【0007】
そこで、ロボットの制御において、2つの物体を適切な目標位置関係にする上で有利な技術が求められていた。
【課題を解決するための手段】
【0008】
本発明の第1の態様は、コンピュータが、ロボットに保持された第1物体と、第2物体と、の位置関係を反映した現在画像を取得し、前記現在画像に基づいて、前記第1物体と前記第2物体が基準位置関係にあると判定したら、前記第1物体と前記第2物体が目標位置関係になるように、前記判定の前に設定された前記ロボットの動作または前記現在画像の取得の後にユーザから指示された前記ロボットの動作に従って、前記ロボットの位置姿勢を制御する、ことを特徴とするロボットの制御方法である。
【0009】
また、本発明の第2の態様は、機械装置に保持された第1教示用物体と、第2教示用物体と、が目標位置関係になるように、前記機械装置の位置姿勢を設定し、前記第1教示用物体と前記第2教示用物体が前記目標位置関係から基準位置関係になるように、前記第1教示用物体を保持した前記機械装置の位置姿勢を変更し、前記第1教示用物体と前記第2教示用物体が前記基準位置関係にあることを反映した参照画像を取得し、コンピュータが、ロボットに保持された第1物体と、第2物体と、の位置関係を反映した現在画像を取得し、前記参照画像と前記現在画像に基づいて、前記第1物体と第2物体が前記基準位置関係にあると判定したら、前記第1物体と前記第2物体が前記目標位置関係になるように、前記第1物体を保持した前記ロボットの位置姿勢を制御する、ことを特徴とするロボットの制御方法である。
【発明の効果】
【0010】
本発明によれば、現在画像に基づいて基準位置関係にあること判定するため、2つの物体を適切な目標位置関係にする上で有利な技術を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
6日前
キヤノン株式会社
撮像装置
5日前
キヤノン株式会社
記録装置
7日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
撮像装置
7日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
情報処理装置
5日前
キヤノン株式会社
液体吐出装置
7日前
キヤノン株式会社
情報処理装置
5日前
キヤノン株式会社
推論処理装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
光電変換装置
5日前
キヤノン株式会社
画像読取装置
6日前
キヤノン株式会社
欠陥検査装置
7日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像表示装置
5日前
キヤノン株式会社
画像処理システム
6日前
キヤノン株式会社
放射線撮影システム
6日前
キヤノン株式会社
光学装置及び撮像装置
5日前
キヤノン株式会社
光学系および撮像装置
5日前
キヤノン株式会社
光学装置及び撮像装置
5日前
キヤノン株式会社
光学装置、及び撮像装置
6日前
キヤノン株式会社
電源装置及び画像形成装置
5日前
キヤノン株式会社
伝送装置及び伝送システム
6日前
キヤノン株式会社
レンズ鏡筒、及び撮像装置
6日前
キヤノン株式会社
管理システム及び管理方法
7日前
キヤノン株式会社
撮像装置およびその制御方法
6日前
キヤノン株式会社
配置装置、配置方法、プログラム
5日前
キヤノン株式会社
情報処理装置、方法およびプログラム
5日前
キヤノン株式会社
通信装置、制御方法、及びプログラム
6日前
キヤノン株式会社
撮像装置、制御方法およびプログラム
9日前
キヤノン株式会社
撮像装置、制御方法およびプログラム
5日前
キヤノン株式会社
撮像部支持装置および撮像装置システム
5日前
キヤノン株式会社
画像形成装置、制御方法およびプログラム
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ