TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025054900
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023164116
出願日
2023-09-27
発明の名称
検出システム、検出方法、及び検出プログラム
出願人
シャープ株式会社
代理人
個人
,
個人
,
個人
主分類
G01S
7/497 20060101AFI20250401BHJP(測定;試験)
要約
【課題】測距部の汚れを正確に検出することが可能な検出システム、検出方法、及び検出プログラムを提供する。
【解決手段】取得処理部211は、所定の測距方向における対象物までの距離を測定するセンサー24により測定される複数の測距データを取得する。算出処理部212は、取得処理部211により取得される前記複数の測距データのばらつきを算出する。判定処理部213は、算出処理部212により算出される前記ばらつきに基づいて、センサー24の汚れ状態を判定する。
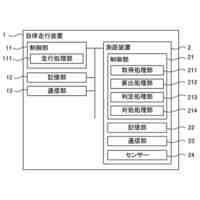
【選択図】図1
特許請求の範囲
【請求項1】
所定の測距方向における対象物までの距離を測定する測距部により測定される複数の測距データを取得する取得処理部と、
前記取得処理部により取得される前記複数の測距データのばらつきを算出する算出処理部と、
前記算出処理部により算出される前記ばらつきに基づいて、前記測距部の汚れ状態を判定する判定処理部と、
を備える検出システム。
続きを表示(約 1,300 文字)
【請求項2】
前記ばらつきは、前記複数の測距データと前記複数の測距データの平均値との差を二乗した合計を前記複数の測距データのデータ数で除して算出される、
請求項1に記載の検出システム。
【請求項3】
前記判定処理部は、前記算出処理部により算出される前記ばらつきが閾値以上の場合に、前記測距部が汚れていると判定する、
請求項1に記載の検出システム。
【請求項4】
前記測距部が移動体に設置される場合には、前記移動体が停止していることを条件として、前記算出処理部が前記ばらつきを算出し、前記判定処理部が前記測距部の汚れ状態を判定する、
請求項1に記載の検出システム。
【請求項5】
前記取得処理部は、複数の測距方向のそれぞれについて、前記複数の測距データを取得し、
前記算出処理部は、前記複数の測距方向のそれぞれについて、前記ばらつきを算出し、
前記判定処理部は、前記複数の測距方向のそれぞれについて、前記汚れ状態を判定する、
請求項1に記載の検出システム。
【請求項6】
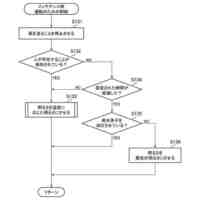
前記測距部が移動体に設置される場合に、前記判定処理部による判定結果に応じた処理を実行する対処処理部をさらに備え、
前記対処処理部は、
前記複数の測距方向のうち、前記汚れが検出された測距方向の範囲が第1範囲未満の場合に、前記範囲における前記判定処理部の判定処理を停止するとともに前記移動体の走行を継続させ、
前記複数の測距方向のうち、前記汚れが検出された測距方向の範囲が前記第1範囲以上かつ第2範囲未満の場合に、前記範囲における前記判定処理部の判定処理を停止するとともに前記移動体を減速走行させ、
前記複数の測距方向のうち、前記汚れが検出された測距方向の範囲が前記第2範囲以上の場合に、前記移動体の走行を停止させるとともにユーザーに報知する、
請求項5に記載の検出システム。
【請求項7】
前記測距部が移動体に設置される場合に、前記判定処理部は、前記移動体が走行可能な走行エリアの地図データにおける前記測距部から前記対象物までの推定距離と、前記複数の測距データとに基づいて、前記汚れ状態を判定する、
請求項1に記載の検出システム。
【請求項8】
前記判定処理部は、前記移動体が走行中に前記汚れ状態を判定する、
請求項7に記載の検出システム。
【請求項9】
所定の測距方向における対象物までの距離を測定する測距部により測定される複数の測距データを取得することと、
前記複数の測距データのばらつきを算出することと、
前記ばらつきに基づいて、前記測距部の汚れ状態を判定することと、
を一又は複数のプロセッサーが実行する検出方法。
【請求項10】
所定の測距方向における対象物までの距離を測定する測距部により測定される複数の測距データを取得することと、
前記複数の測距データのばらつきを算出することと、
前記ばらつきに基づいて、前記測距部の汚れ状態を判定することと、
を一又は複数のプロセッサーに実行させるための検出プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、測距部(測距センサー)の汚れを検出する技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、障害物を検知して回避しながら自律走行可能な自律走行装置(自律走行車、AGVなど)が知られている。また、前記自動走行装置に搭載され、障害物を検知する測距部(例えばライダーセンサー)において、光学窓に付着した異物などの汚れを検出する技術が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-70796号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
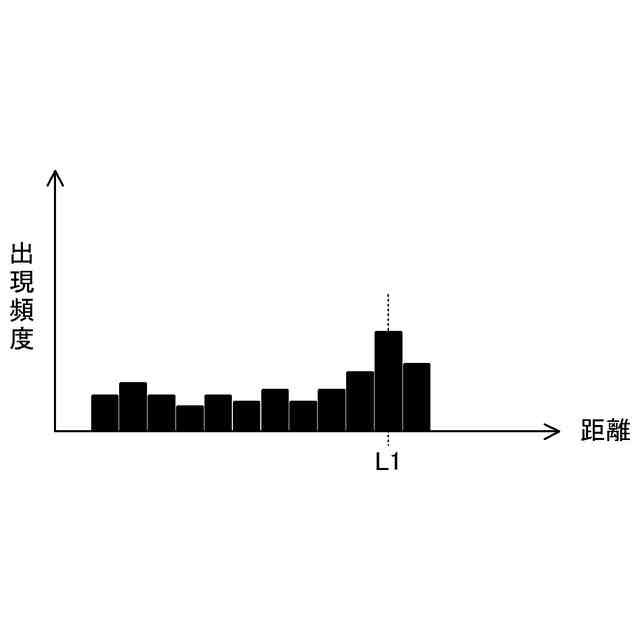
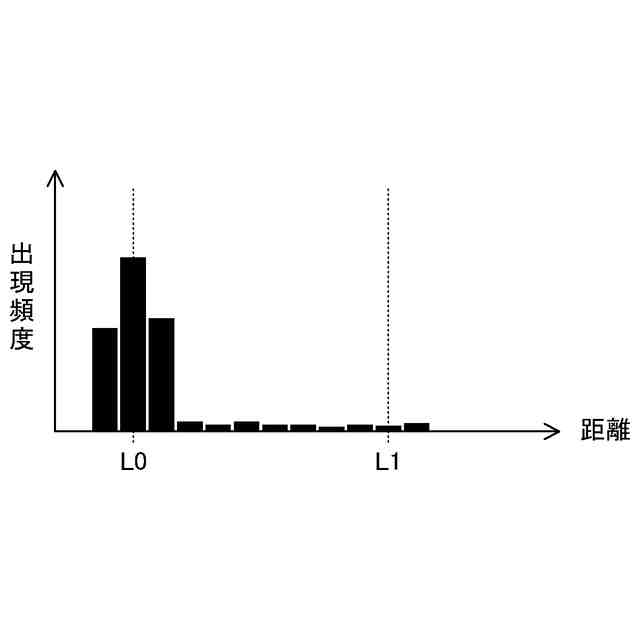
従来の技術では、測距部の光学窓に大きなゴミや汚れが付着した場合には、汚れが付着した部分の測距部の検出データの値が大きく変化するため、測距部の汚れを検出することができるが、例えば光学窓に微小な埃が付着した場合には、測距部の検出データが正常値になったり異常値になったりするなど、不安定な検出データが取得されるため、正確に汚れを検出することが困難になる。
【0005】
本開示の目的は、測距部の汚れを正確に検出することが可能な検出システム、検出方法、及び検出プログラムを提供することにある。
【課題を解決するための手段】
【0006】
本開示の一の態様に係る検出システムは、取得処理部と算出処理部と判定処理部とを備える。前記取得処理部は、所定の測距方向における対象物までの距離を測定する測距部により測定される複数の測距データを取得する。前記算出処理部は、前記取得処理部により取得される前記複数の測距データのばらつきを算出する。前記判定処理部は、前記算出処理部により算出される前記ばらつきに基づいて、前記測距部の汚れ状態を判定する。
【0007】
本開示の他の態様に係る検出方法は、所定の測距方向における対象物までの距離を測定する測距部により測定される複数の測距データを取得することと、前記複数の測距データのばらつきを算出することと、前記ばらつきに基づいて、前記測距部の汚れ状態を判定することと、を一又は複数のプロセッサーが実行する方法である。
【0008】
本開示の他の態様に係る検出プログラムは、所定の測距方向における対象物までの距離を測定する測距部により測定される複数の測距データを取得することと、前記複数の測距データのばらつきを算出することと、前記ばらつきに基づいて、前記測距部の汚れ状態を判定することと、を一又は複数のプロセッサーに実行させるためのプログラムである。
【発明の効果】
【0009】
本開示によれば、測距部の汚れを正確に検出することが可能な検出システム、検出方法、及び検出プログラムを提供することができる。
【図面の簡単な説明】
【0010】
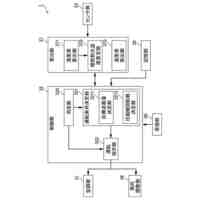
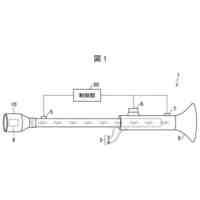
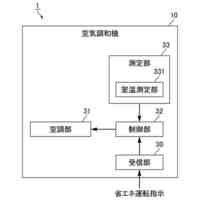
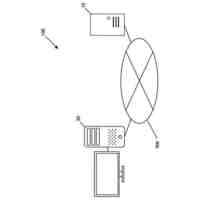
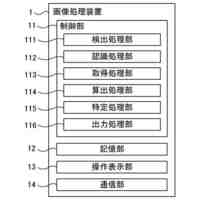
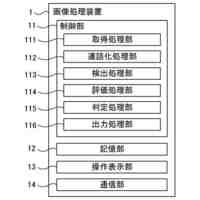
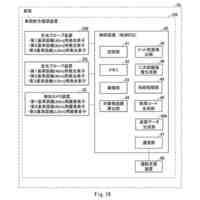
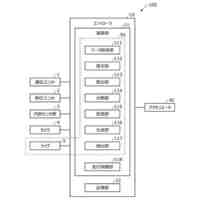
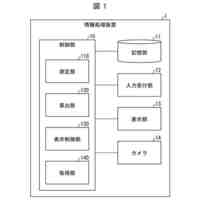
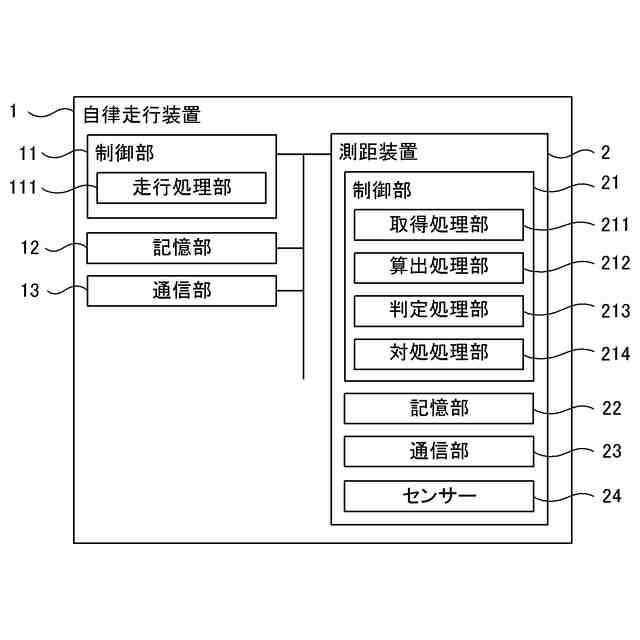
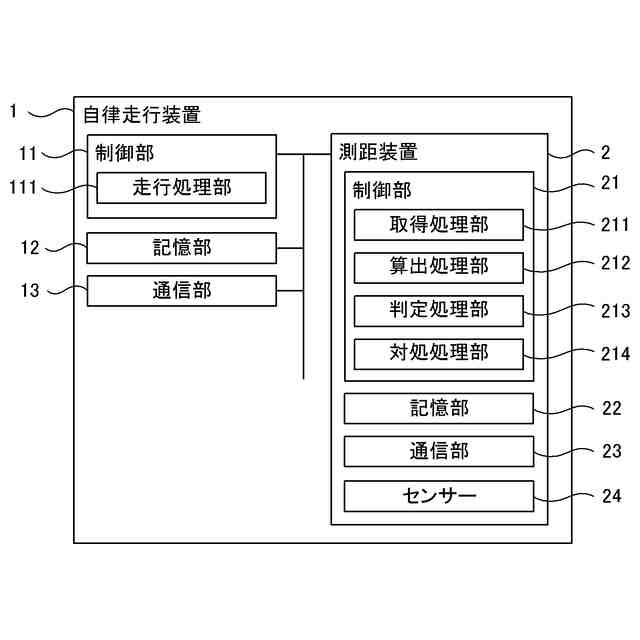
図1は、本開示の実施形態に係る自律走行装置の全体構成を示すブロック図である。
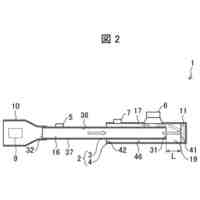
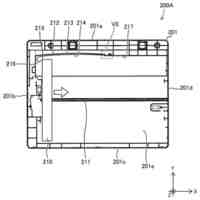
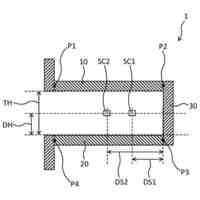
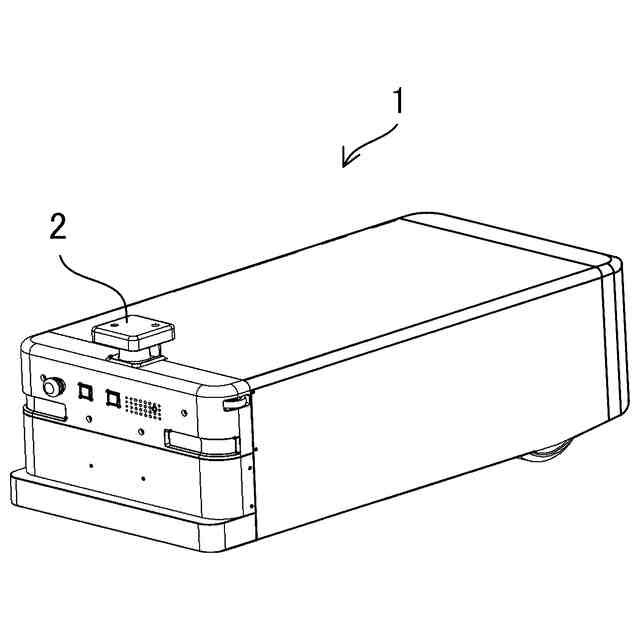
図2は、本開示の実施形態に係る自律走行装置の外観を示す斜視図である。
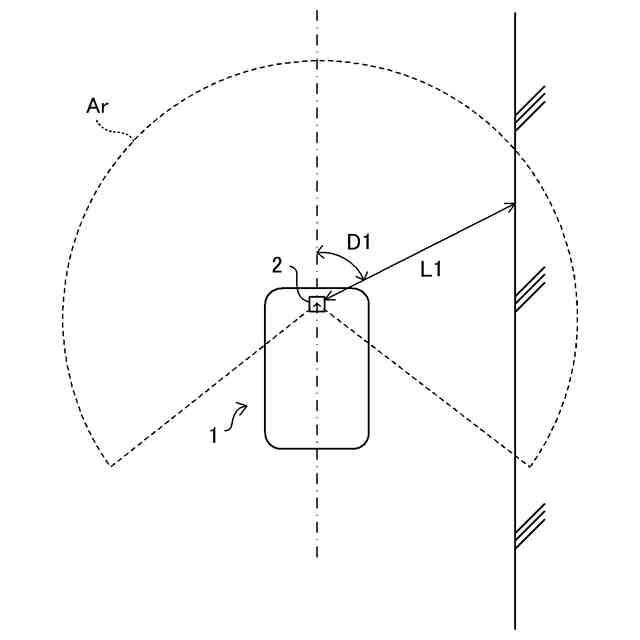
図3は、本開示の実施形態に係る測距装置の検知可能範囲の一例を示す図である。
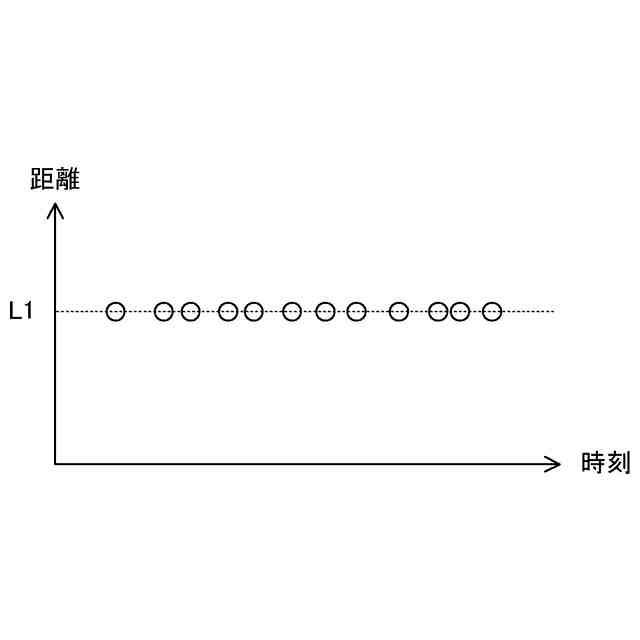
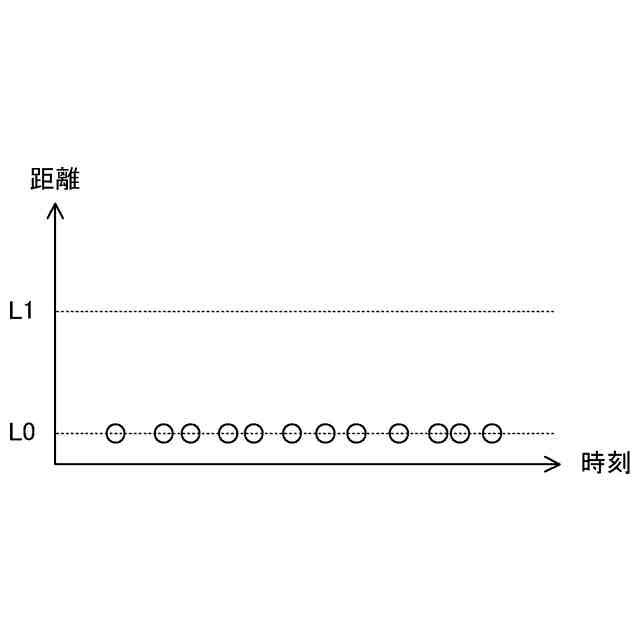
図4Aは、本開示の実施形態に係るセンサーの測定結果の一例を示すグラフである。
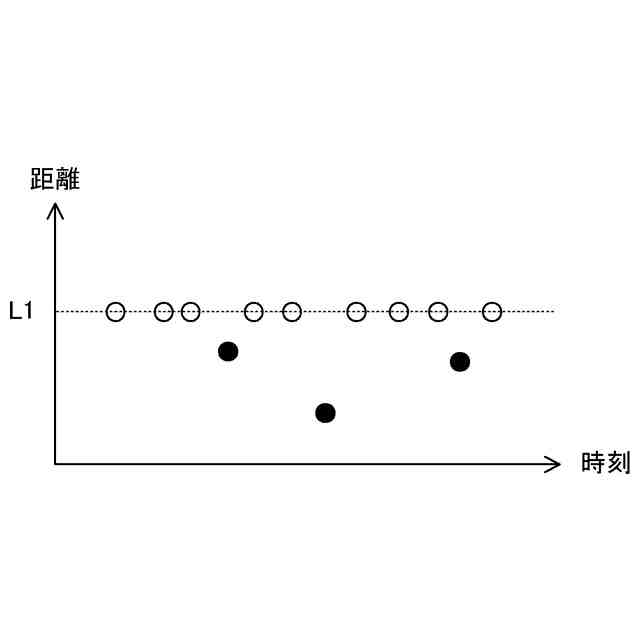
図4Bは、本開示の実施形態に係るセンサーの測定結果の一例を示すグラフである。
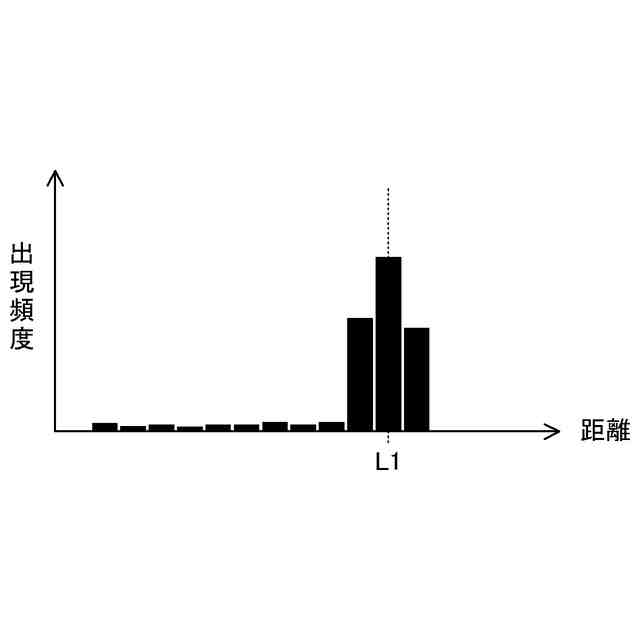
図5Aは、本開示の実施形態に係るセンサーの測定結果の一例を示すヒストグラムである。
図5Bは、本開示の実施形態に係るセンサーの測定結果の一例を示すヒストグラムである。
図6Aは、本開示の実施形態に係るセンサーの測定結果の一例を示すグラフである。
図6Bは、本開示の実施形態に係るセンサーの測定結果の一例を示すヒストグラムである。
図7は、本開示の実施形態に係るセンサーの測距例を示す図である。
図8は、本開示の実施形態に係るセンサーの測距例を示す図である。
図9は、本開示の実施形態に係る測距装置において実行される汚れ検出処理の手順の一例を示すフローチャートである。
図10は、本開示の実施形態に係る自律走行装置が走行するエリアの地図を示す図である。
図11Aは、本開示の実施形態に係るセンサーの測定結果の一例を示すグラフである。
図11Bは、本開示の実施形態に係るセンサーの測定結果の一例を示すグラフである。
図12Aは、本開示の実施形態に係るセンサーの測定結果の一例を示すヒストグラムである。
図12Bは、本開示の実施形態に係るセンサーの測定結果の一例を示すヒストグラムである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
シャープ株式会社
照明装置
2日前
シャープ株式会社
空調制御システム
2日前
シャープ株式会社
騒音低減装置および掃除機
5日前
シャープ株式会社
騒音低減装置および掃除機
5日前
シャープ株式会社
動画像符号化装置、復号装置
1日前
シャープ株式会社
画像読取装置及び画像形成装置
1日前
シャープ株式会社
空調制御システム及び空気調和機
2日前
シャープ株式会社
回転ブラシ、掃除機及び吸込口体
2日前
シャープ株式会社
端末装置、方法、および、集積回路
2日前
シャープ株式会社
端末装置、および、方法、集積回路
2日前
シャープ株式会社
UE(User Equipment)
2日前
シャープ株式会社
動画像復号装置および動画像符号化装置
1日前
シャープ株式会社
受信装置、放送システム、および、受信方法
6日前
シャープ株式会社
検出システム、検出方法、及び検出プログラム
1日前
シャープ株式会社
3Dデータ符号化装置および3Dデータ復号装置
5日前
シャープ株式会社
情報処理装置、帳票登録システム、及び帳票登録方法
2日前
シャープ株式会社
掃除機の吸込口体、掃除機及び自走式掃除機の吸込口構造
2日前
シャープ株式会社
ホワイトバランス補正装置およびホワイトバランス補正方法
2日前
シャープ株式会社
画像処理システム、画像処理方法、及び画像処理プログラム
5日前
シャープ株式会社
画像処理システム、画像処理方法、及び画像処理プログラム
5日前
シャープ株式会社
画像処理システム、画像処理方法、及び画像処理プログラム
5日前
シャープ株式会社
文字処理システム、文字処理方法、及び文字処理プログラム
5日前
シャープ株式会社
情報処理装置、テレビジョン受像機、情報処理方法、およびプログラム
6日前
個人
通電検査装置
6日前
日本精機株式会社
位置検出装置
2日前
株式会社ハシマ
検針機
5日前
東ソー株式会社
自動分析装置及び方法
2日前
DIC株式会社
測定装置
7日前
株式会社ヨコオ
シートコンタクタ
2日前
スタンレー電気株式会社
車両前方視認装置
5日前
ダイハツ工業株式会社
凹部の深さ測定方法
5日前
矢崎総業株式会社
電流センサ
6日前
スタンレー電気株式会社
車両前方視認装置
5日前
本田技研工業株式会社
物体検出装置
5日前
本田技研工業株式会社
物体検出装置
5日前
JRCモビリティ株式会社
充電用温度判定回路
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ