TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025045975
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023154083
出願日
2023-09-21
発明の名称
流速測定方法およびマイクロ流体システム
出願人
TOPPANホールディングス株式会社
代理人
弁理士法人第一国際特許事務所
主分類
G01P
5/20 20060101AFI20250326BHJP(測定;試験)
要約
【課題】本発明では、マイクロ流路の形状に左右されずマイクロ流路内の流速情報を正確に取得可能な技術を提供することを目的とする。
【解決手段】本発明の流速測定方法の一つは、マイクロ流路を備えるマイクロ流体デバイスに溶液を送液する第1工程と、前記マイクロ流路に光信号を照射し、前記マイクロ流路を透過した光信号の光強度の分布を時系列に取得する第2工程と、前記第2工程において取得された第1時刻の前記光強度の分布と第2時刻の前記光強度の分布との変化を示す時系列変化を算出し、前記光強度の分布の前記時系列変化から、前記マイクロ流路内の前記溶液の流速を算出する第3工程と、を含むものである。
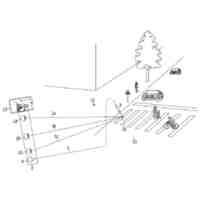
【選択図】図1
特許請求の範囲
【請求項1】
マイクロ流路を備えるマイクロ流体デバイスに溶液を送液する第1工程と、
前記マイクロ流路に光信号を照射し、前記マイクロ流路を透過した光信号の光強度の分布を時系列に取得する第2工程と、
前記第2工程において取得された第1時刻の前記光強度の分布と第2時刻の前記光強度の分布との変化を示す時系列変化を算出し、前記光強度の分布の前記時系列変化から、前記マイクロ流路内の前記溶液の流速を算出する第3工程と、を含む流速測定方法。
続きを表示(約 820 文字)
【請求項2】
請求項1に記載の流速測定方法において、
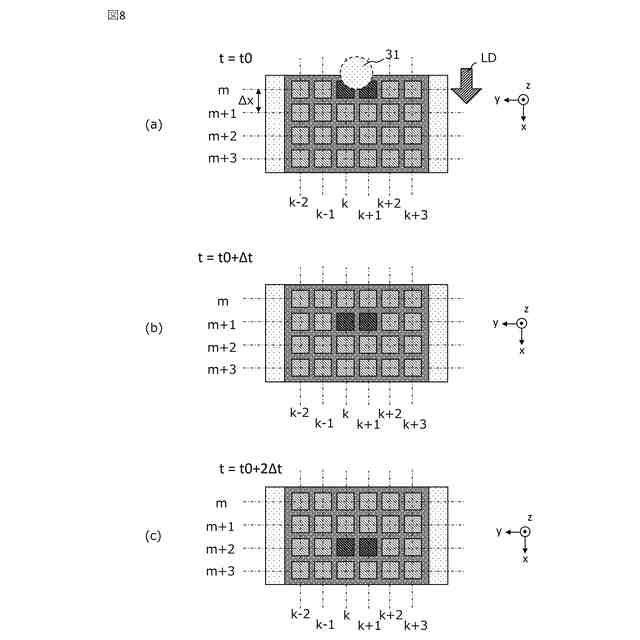
前記第2工程における前記光強度は、所定の時間間隔であるΔtごとに取得され、
t0を所定の時刻とした場合、前記マイクロ流路の所定の位置において、時刻t0+Δt・n(nは正の整数)における流速v
n
と時刻t0+Δt・(n-1)における流速v
n-1
を比較し、流速の増減を判断する第4工程と、をさらに含む流速測定方法。
【請求項3】
請求項2に記載の流速測定方法において、前記流速の増減から前記マイクロ流路の前記所定の位置においてつまりが発生したことを判断する第5工程と、をさらに含む流速測定方法。
【請求項4】
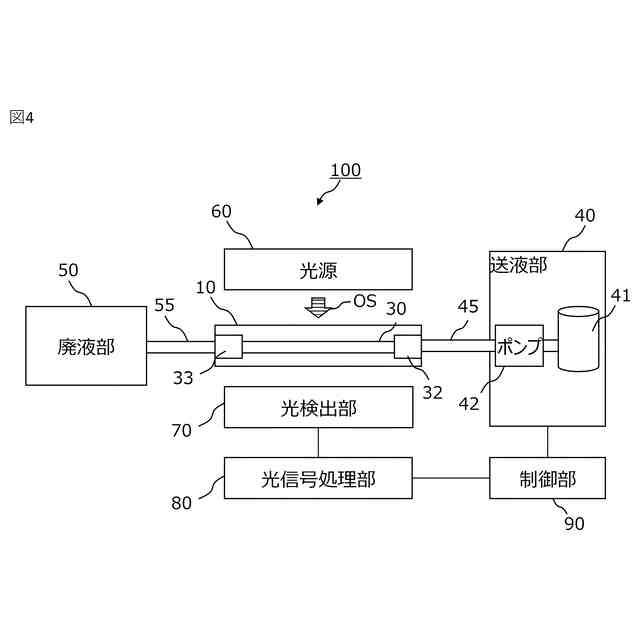
請求項1記載の流速測定方法が実行されるマイクロ流体システムであって、
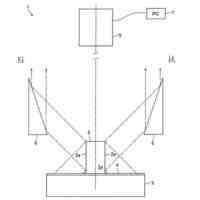
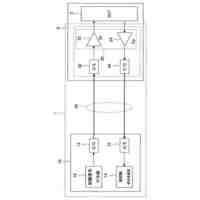
前記マイクロ流体システムは、少なくとも前記マイクロ流体デバイスと、前記第2工程において前記光強度を取得する光検出部と、前記第2工程において前記光信号を照射する光源部とを含み、
前記マイクロ流体デバイスは、前記光検出部と前記光源部との間であって、かつ前記光源部から照射される前記光信号の照射方向と前記マイクロ流路の送液方向が垂直になるように配置され、
前記マイクロ流路と前記光検出部の間に、複数の光透過領域と遮光領域によって構成される光学フィルタが配置される、
マイクロ流体システム。
【請求項5】
請求項4に記載のマイクロ流体システムであって、前記光学フィルタは、前記複数の光透過領域の内の1つ以上の光透過領域が特定の波長領域の光を透過させることができる、マイクロ流体システム。
【請求項6】
請求項4または請求項5に記載のマイクロ流体システムであって、
前記光学フィルタは、前記マイクロ流体デバイス内に配置される、マイクロ流体システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、流速測定方法およびマイクロ流体システムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来から、おおよそ1μmから1mm程度の毛管寸法のマイクロ流路やマイクロウェルを含むマイクロ構造によって微小容量の流体を操作できる、Lab-on-a-Chipもしくは、マイクロTAS、マイクロ化学チップなどと呼ばれるマイクロ流体デバイスが知られている。近年、このようなデバイスは、化学実験をダウンサイジングするための機器として、あるいは検体発生現場等において検体分析、いわゆるPOCT(point-of-care-testing)を簡便にかつ速やかに行うための機器として注目されている。特にPOCTにおいて、検体分析で対象となる検体としては、主に動物の体液、例えば、血液や唾液、尿などが挙げられる。一般に、体液内にはタンパク質や細胞などの生物由来の微粒子が含まれており、これらの微粒子を光学センサや電気的センサなどで検出することにより、生体情報を取得することが可能となる。
【0003】
マイクロ流体デバイスへ微粒子を含む検体である懸濁液を送液し、生体情報が検出されるまでの間で、マイクロ流体デバイス中で懸濁液の濃縮やフィルタリング、混合など様々な前処理が実施される。そして、こうした前処理を行うことによって、より精度の高い解析が可能となる。これら前処理のなかには、マイクロ流体デバイス中のマイクロ構造を懸濁液が通過する際に行われる処理も含まれている。このような場合は、懸濁液がマイクロ流体デバイス内を正常に通過することによって適切な前処理が実現される。
【0004】
一方で、マイクロ構造に微粒子や夾雑物、気泡が付着すると、マイクロ流体デバイス内につまりが発生する場合がある。この場合、送液が正常に行われず、適切な前処理が実行されないまま検出および解析が行われ、その精度が低下することがある。このような解析精度の低下を防止するため、あるいは解析精度の低下の発生を予測するためには、マイクロ流体デバイス中における流速や流量、圧力など送液の情報をリアルタイムに取得する必要がある。
【0005】
特許文献1では、マイクロ流路に第1液を導入する第1ステップと、マイクロ流路に溶質を含む第2液を導入し、層流で送流させる第2ステップと、マイクロ流路に導入された第1液と第2液とを含む液体の屈折率を時系列的に測定する第3ステップと、上記屈折率の時系列データから、液体中の溶質の濃度が第1液と第2液とが接触する前の第2液中の溶質の濃度の半分となる濃度境界の位置の時間変化を示す濃度境界データを生成する第4ステップと、濃度境界データを第2液の拡散係数とマイクロ流路の厚さ方向の長さに基づいて換算した換算データを生成する第5ステップと、換算データに基づいて、マイクロ流路内の第1液および第2液を含む液体の流速を算出する第6ステップとを含むことを特徴とする流速測定法が提示されている。
【先行技術文献】
【特許文献】
【0006】
特開2018-9794号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の流速測定法では、流れが層流かつ均一であることが必要であるため、流路の形状が直線型に限定される。しかし、マイクロ流体デバイスにおいては、検体を前処理する際に、マイクロ流路の形状を曲線型や蛇行型など直線流路よりも複雑な形状にしたり、流路内にマイクロピラーなどマイクロ流路より微細な構造を設けたりすることで、流れを不均一または乱流にすることが多い。しかし、特許文献1で提示される流速測定法では、直線以外の形状のマイクロ流路を持つマイクロ流体デバイスに適用することは想定されていない。
そこで、本発明では、マイクロ流路の形状に左右されずマイクロ流路内の流速情報を正確に取得可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、代表的な本発明の流速測定方法の一つは、マイクロ流路を備えるマイクロ流体デバイスに溶液を送液する第1工程と、前記マイクロ流路に光信号を照射し、前記マイクロ流路を透過した光信号の光強度の分布を時系列に取得する第2工程と、前記第2工程において取得された第1時刻の前記光強度の分布と第2時刻の前記光強度の分布との変化を示す時系列変化を算出し、前記光強度の分布の前記時系列変化から、前記マイクロ流路内の前記溶液の流速を算出する第3工程と、を含むものである。
【発明の効果】
【0009】
本発明によれば、マイクロ流路の形状に左右されずマイクロ流路内の流速情報を正確に取得可能な技術を提供することができる。
上記した以外の課題、構成および効果は、以下の発明を実施するための形態における説明により明らかにされる。
【図面の簡単な説明】
【0010】
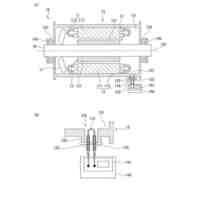
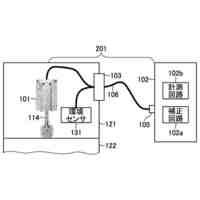
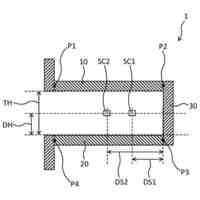
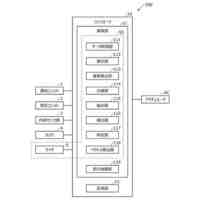
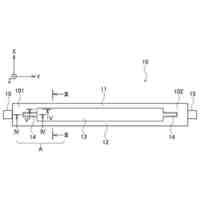
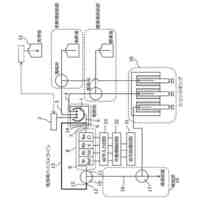
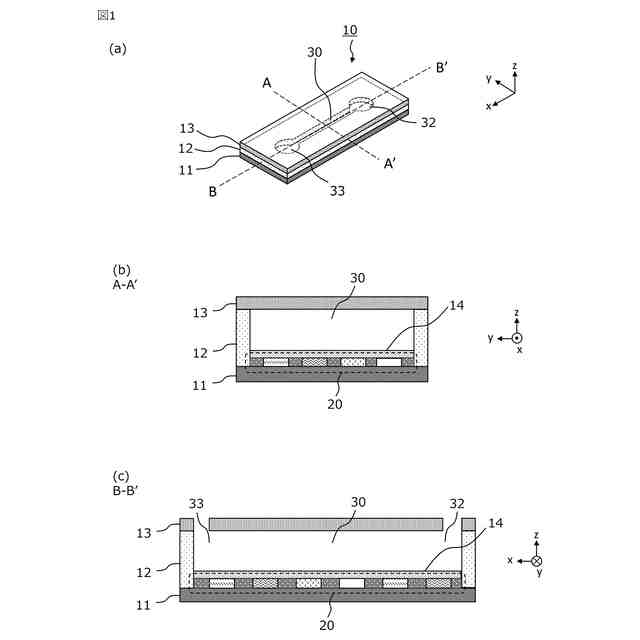
図1は、マイクロ流体デバイスの構成を模式的に示す図である。
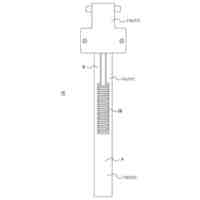
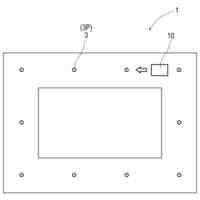
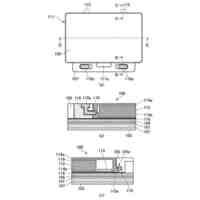
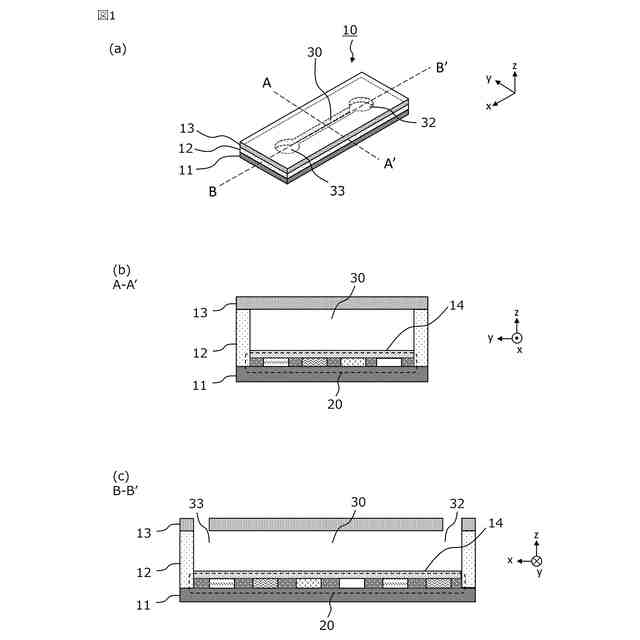
図2は、光学フィルタの構造を模式的に示す図である。
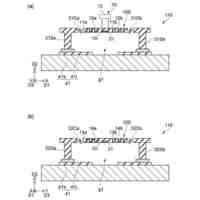
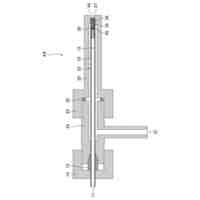
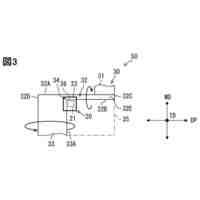
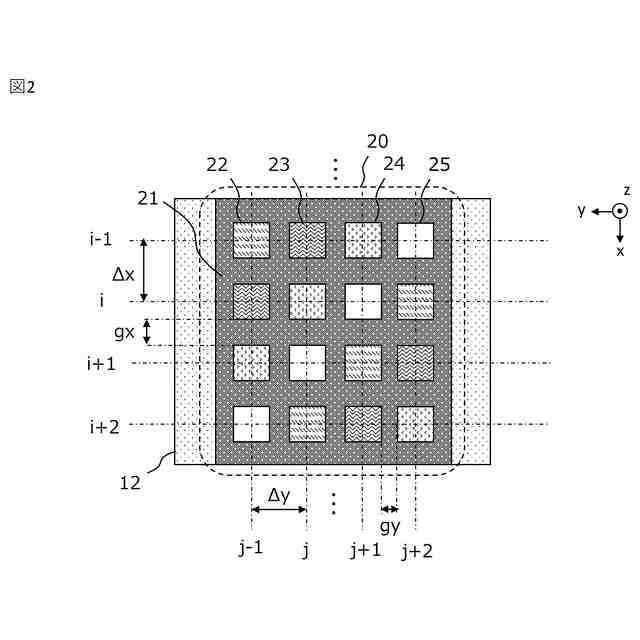
図3は、光学フィルタの形成工程の一例を示す図である。
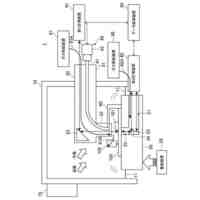
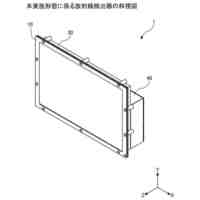
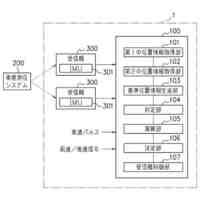
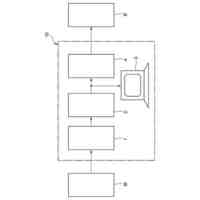
図4は、マイクロ流体システムの構成を模式的に示す図である。
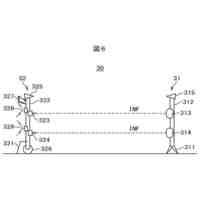
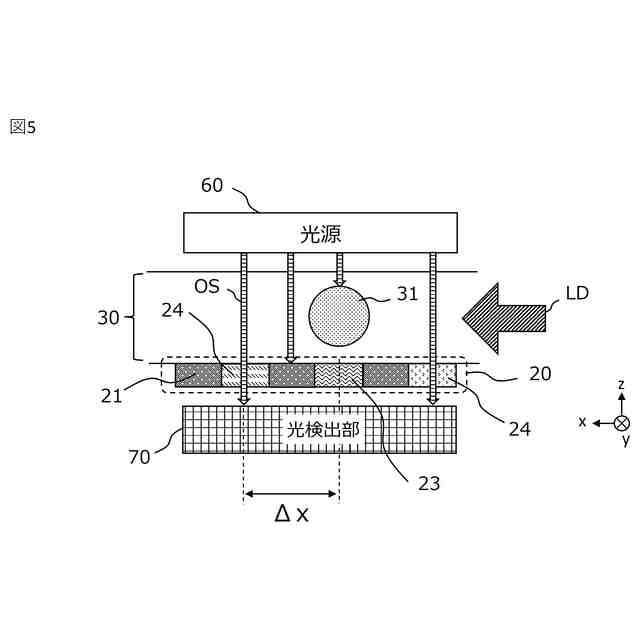
図5は、光源部から照射された光信号がマイクロ流路を透過する場合を示す図である。
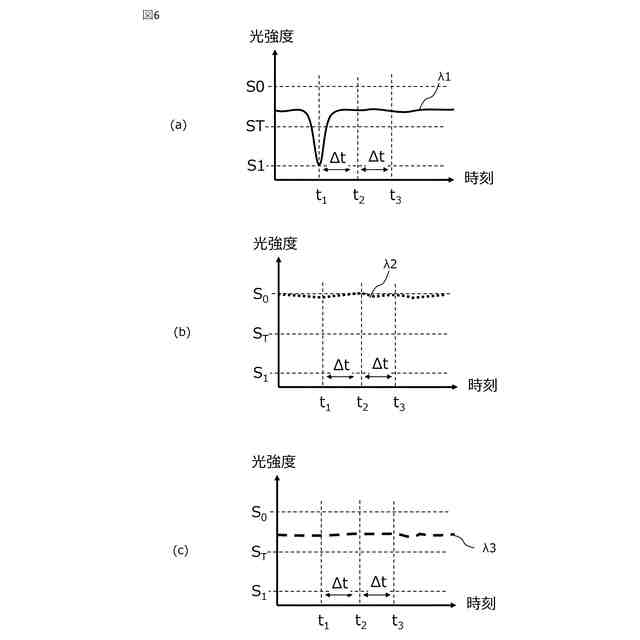
図6は、図5の第2透過領域において、光検出部によって検出された光信号の光強度を時系列に示す図である。
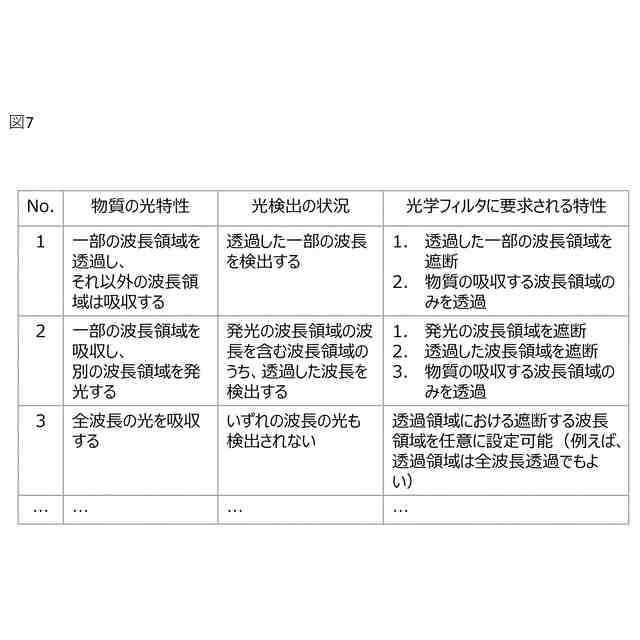
図7は、物質の光特性と光学フィルタに要求される特性との関係を示す図である。
図8は、光検出部によって検出された光強度の分布を示す図である。
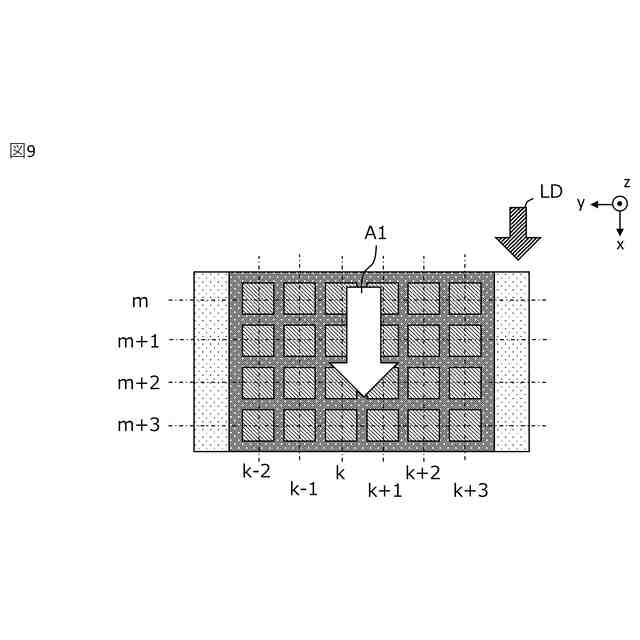
図9は、図8に示される光強度の分布の時系列変化から溶液の流速を算出する場合を示す図である。
図10は、光強度の分布の時系列変化から溶液の流速を算出する別の場合を示す図である。
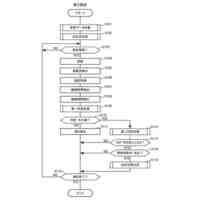
図11は、流速測定のフローチャートである。
図12は、マイクロ流路におけるつまりの発生を判断する方法のフローチャートである。
図13は、第2実施形態の変形例のフローチャートである。
図14は、光強度を用いてマイクロ流路におけるつまりの発生を判断する方法のフローチャートである。
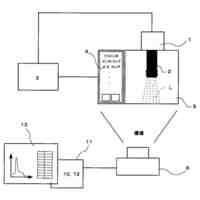
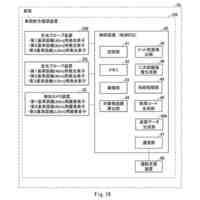
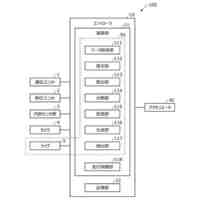
図15は、マイクロ流体システムの構成を模式的に示す図である。
図16は、S0とS
n
の関係を示す図である。
図17は、第3実施形態の変形例のフローチャートである。
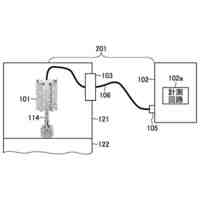
図18は、マイクロ流体システムの構成を模式的に示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
通電検査装置
3日前
個人
光フアィバー距離計測器
5日前
個人
光フアィバー距離計測器
5日前
個人
バッテリ用交流電流供給装置
5日前
株式会社ハシマ
検針機
2日前
株式会社オービット
検査装置
12日前
株式会社東芝
センサ
12日前
有限会社フィット
外観検査装置
16日前
富士電機株式会社
回転機
13日前
株式会社SUBARU
車載装置
19日前
株式会社東芝
試験装置
19日前
靜甲株式会社
液切れ性評価システム
20日前
アズビル株式会社
真空計測システム
13日前
アズビル株式会社
真空計測システム
13日前
シスメックス株式会社
分析装置
9日前
DIC株式会社
測定装置
4日前
富士電機株式会社
放射線検出器
4日前
株式会社タムラ製作所
電流検出器
9日前
オムロン株式会社
電気装置
20日前
株式会社アドバンテスト
試験装置
11日前
個人
ネブライザー
11日前
株式会社デンソー
電流検出器
16日前
日鉄テックスエンジ株式会社
情報処理装置
9日前
スタンレー電気株式会社
車両前方視認装置
2日前
スタンレー電気株式会社
車両前方視認装置
2日前
ダイハツ工業株式会社
凹部の深さ測定方法
2日前
矢崎総業株式会社
電流センサ
3日前
本田技研工業株式会社
物体検出装置
2日前
本田技研工業株式会社
物体検出装置
2日前
株式会社国際電気
調整装置
16日前
愛知製鋼株式会社
測量方法及び測量システム
9日前
株式会社日本マイクロニクス
プローブ
9日前
株式会社エイアンドティー
生体試料分析装置
9日前
株式会社レイズテック
部品寸法データ集計装置
18日前
キヤノン株式会社
放射線撮影装置及びバッテリ
13日前
株式会社テイエルブイ
厚さ測定装置及び厚さ測定方法
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ