TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025044109
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2024024883
出願日
2024-02-21
発明の名称
光フアィバー距離計測器
出願人
個人
代理人
主分類
G01S
7/481 20060101AFI20250325BHJP(測定;試験)
要約
【課題】光ファイバー使用して簡素化し、計測精度を高めた3次元距離計測器を提供する。
【解決手段】3次元距離計測器は、空間を飛行する光の時間と光ファイバー内を伝わる時間の違いを、光ファイバー先端からの端面反射波を検出して光ファイバー内の伝搬時間を校正することで高精度化を図る。
距離計測光を発光して入射させた光ファイバーを通って先端の、光ファイバーを通った固有な時間を使って、発光した時間を共有する位置で、放光して空間を飛行した距離計測光を受光して距離を計測する方法。
放光して空間を飛行した距離計測光を、光ファイバーを通った複数の発光した時間を共有する複数の位置で受光して、複数の距離の位置を計測するする方法。
距離計測光を発光して入射させた光ファイバーを通って先端から放光して空間を飛行した距離計測光を、光ファイバーを通った固有な時間を使って、放光した時間を共有する発光した位置で距離を計測する方法。
【選択図】図57
特許請求の範囲
【請求項1】
距離計測光の空間を飛行する時間を計測して前記飛行した距離を演算する距離計測器にあって、発光して入射させた光ファイバーを通った先端の位置で放光して前記空間を飛行する前記距離計測光を、前記発光した位置又は前記発光した時間を共有する位置又は前記発光した時間を共有する複数の異なる位置で、又は、発光して放光して前記空間を飛行する前記距離計測光を、前記発光して入射させた光ファイバーを通った先端の位置の前記発光した位置又は前記発光した時間を共有する位置又は前記発光した時間を共有する複数の異なる位置で、前記計測することを特徴とする距離計測方法。
続きを表示(約 2,600 文字)
【請求項2】
距離計測光の空間を飛行する時間を計測して前記飛行した距離を演算する距離計測器にあって、発光して入射させた光ファイバーを通った先端の位置で被写体に接着して放光して前記空間を飛行する前記距離計測光を、前記発光した位置又は前記発光した時間を共有する位置又は前記発光した時間を共有する複数の異なる位置で、又は、発光して被写体に接着して放光して前記空間を飛行する前記距離計測光を、前記発光して入射させた光ファイバーを通った先端の前記発光した位置又は前記発光した時間を共有する位置又は前記発光した時間を共有する複数の異なる位置で、前記計測することを特徴とする距離計測方法。
【請求項3】
距離計測光の空間を飛行する時間を計測して前記飛行した距離を演算する距離計測器にあって、発光して入射させた光ファイバーを通った先端から放光して空間を飛行して照射した被写体から反射して前記空間を飛行する前記距離計測光を、前記発光した位置又は前記発光した時間を共有する位置又は前記発光した時間を共有する複数の異なる位置で、又は、発光して空間を飛行して照射した被写体から反射して前記空間を飛行する前記距離計測光を、前記発光して入射させた光ファイバーを通った先端の前記発光した位置又は前記発光した時間を共有する位置又は前記発光した時間を共有する複数の異なる位置で、前記計測することを特徴とする距離計測方法。
【請求項4】
距離計測光の空間を飛行する時間を計測して前記飛行した距離を演算する距離計測器にあって、発光して入射させた光ファイバーを通った先端で派生して反射する前記光ファイバーを戻る前記距離計測光を、又は、発光して入射させた光ファイバーを通して前記光ファイバーの先端を被写体に接着して放光して照射した前記被写体からの反射光を前記光ファイバーの前記先端から再入射した前記光ファイバーを戻る前記距離計測光を、又は、発光して入射させた光ファイバーを通して先端から放光して前記空間を飛行して照射した被写体から反射して前記空間を飛行する前記距離計測光を、前記放光した前記光ファイバーの先端から再入射して、前記光ファイバーを戻る前記距離計測光を、前記発光した位置又は前記発光した時間を共有する位置又は前記発光した時間を共有する複数の異なる位置で、前記計測することを特徴とする距離計測方法。
【請求項5】
距離計測光の空間を飛行する時間を計測して前記飛行した距離を演算する距離計測器にあって、幾つかの異なる位置で時間をずらせて発光して入射させた前記幾つかの異なる光ファイバーを通って同じ先端の位置から放光して、前記時間をずらせて前記空間を飛行する前記距離計測光を、前記幾つかの異なる発光した位置又は前記発光した時間を共有する前記幾つかの異なる位置で、又は、時間をずらせて発光して放光した前記時間をずらせた前記空間を飛行する前記距離計測光を、前記時間をずらせて前記発光して入射させた前記幾つかの異なる光ファイバーを通って先端の前記幾つかの異なる位置又は前記発光した時間を共有する前記幾つかの異なる位置で、前記時間をずらせて受光して前記計測することを特徴とする距離計測方法。
【請求項6】
距離計測光の空間を飛行する時間を計測して前記飛行した距離を演算する距離計測器にあって、発光した位置から入射させた光ファイバーを通った先端から放光して前記空間を飛行する前記距離計測光と、前記先端から集光して照射した被写体からの反射光の前記空間を飛行する前記距離計測光を、前記発光した位置又は前記発光した時間を共有する位置又は前記発光した時間を共有する複数の異なる位置で、前記計測することを特徴とする距離計測方法。
【請求項7】
距離計測光の空間を飛行する時間を計測して前記飛行した距離を演算する距離計測器にあって、発光した位置で放光して前記空間を飛行する前記距離計測光と、前記発光した位置から集光して照射した被写体からの反射光の前記空間を飛行する前記距離計測光を、前記発光した位置から入射させた光ファイバーを通った先端の位置又は発光した時間を共有する先端の位置又は発光した時間を共有する複数の異なる先端の位置で、前記計測することを特徴とする距離計測方法。
【請求項8】
距離計測光の空間を飛行する時間を計測して前記飛行した距離を演算する距離計測器にあって、発光して入射させた光ファイバーを通った先端の位置で前記空間に放光した前記距離計測光を、前記発光した位置又は発光した時間を共有する位置又は発光した時間を共有する複数の異なる位置で、駆動機構で撮影する方向を変えるテレビカメラを使ってテレビ画面の中央の位置に前記放光した前記距離計測光の画像の位置が映る様に前記駆動機構を駆動して、前記テレビ画面の前記中央の方向からの前記放光した前記距離計測光を受光する様に、前記テレビカメラに取り付けた受光器を使って前記放光した前記距離計測光を受光することを特徴とする距離計測方法。
【請求項9】
距離計測光の空間を飛行する時間を計測して前記飛行した距離を演算する距離計測器にあって、発光して前記空間に放光した前記距離計測光を、前記発光した前記距離計測光を入射させた光ファイバーを通った先端の位置で、駆動機構で撮影する方向を変えるテレビカメラを使ってテレビ画面の中央の位置に前記放光した前記距離計測光の画像の位置が映る様に前記駆動機構を駆動して、前記テレビ画面の前記中央の方向からの前記放光した前記距離計測光を受光する様に、前記テレビカメラに取り付けた受光器を使って前記放光した前記距離計測光を受光することを特徴とする距離計測方法。
【請求項10】
距離計測光の空間を飛行する時間を計測して前記飛行した距離を演算する距離計測器にあって、発光して放光して前記空間を飛行する前記距離計測光を、前記発光して入射した異なる光ファイバーの中を通って光フアィバーの先端の前記放光した時間を共有する位置又は放光した時間を共有する複数の異なる位置で、前記空間を飛行する前記距離計測光を受光することを特徴とする距離計測方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
距離計測器
続きを表示(約 31,000 文字)
【背景技術】
【0002】
光距離計測
【先行技術文献】
【特許文献】
【0003】
特許第5508308号
特許第5547605号
特許第5547670号
特許第6719494号
特許第7195093号
特願2022-148672
【非特許文献】
【0004】
特願2022-148668
【発明を実施するための形態】
【0005】
光ファイバーを使って、発光及び放光時間を共有する3次元空間の距離を計測する。
【発明の概要】
【0006】
光ファイバーを使って距離計測の簡易化した、本発明の光距離計測の方法を使って計測精度を高めて、コンピューターの把握する3次元空間を構築する。
機器と用語の説明
テレビカメラとレーザー距離計測器は1般の市販品。
数値制御のテレビカメラと数値制御のレーザー距離計測機と数値制御の距離計測受光機と受光器を取り付けた駆動機構とロボットは、撮影する方向と計測する方向と距離計測光を受光する方向とロボットの作業位置の駆動は、数値制御の駆動機構を駆動数値で駆動する。
高速に距離計測は、1秒間に100回から1000回程度の計測速度。
マルチ光ファイバーは幾本かの光ファイバーを、束めて配置して、各先端の位置で放光又は入射又は受光する。
識別は、テレビカメラの撮影したテレビ画面を使って、テレビ画面から検出した画像を含む、画像認識等の方法を使って必要に応じて特定した画像。
【発明が解決しようとする課題】
【0007】
距離計測追尾ロボット
歩行ロボット
ロボットを3次元空間の数値で操作する
測量
デジテル地図の作成
インターネットデジタルマップ
既存地図のデジタル化
既存衛星画像のデジタル化
【発明の効果】
【0008】
デジテル地図のインフラの構築。
【図面の簡単な説明】
【0009】
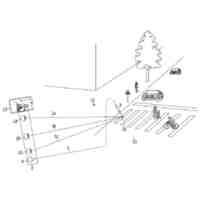
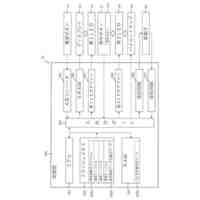
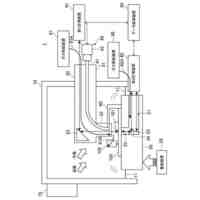
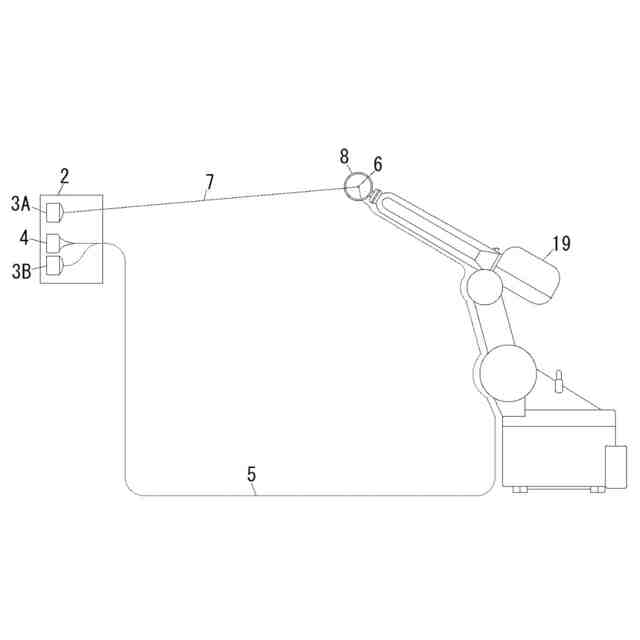
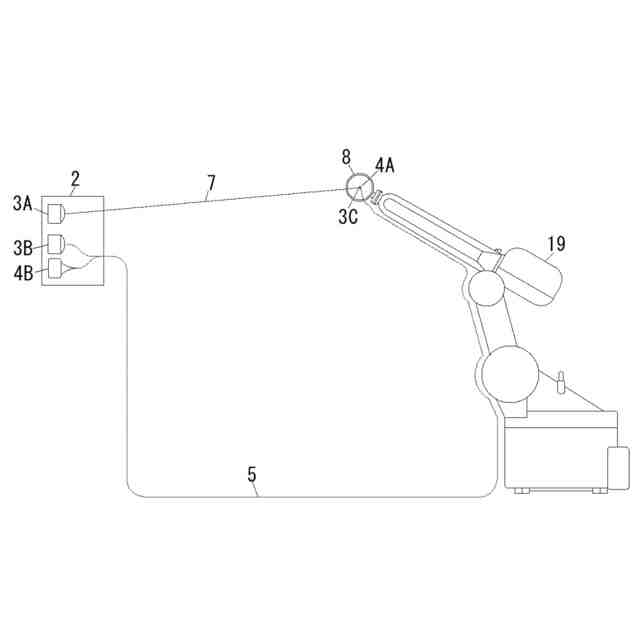
距離計測器2に組み込まれた距離計測発光器4の発光する距離計測光を入射したロボット19の駆動機構内を配置された光ファイバー5の中を通った末端の、ロボット19の作業位置8の放光位置6で空間に放光される。前記空間に放光され前記距離計測光が空間の最近の計測距離7を飛行して、距離計測2に組み込まれた距離計測受光器3Aを使って受光する。距離計測器2に組み込まれた距離計測発光器4の発光する距離計測光を入射したロボット19の駆動機構内を配置された光ファイバー5の中を通った末端の放光位置で派生する反射波の反射光がファイバー5の中を逆行して、前記入射した光ファイバー5の先端に設けた距離計測受光器3Bを使って受光して、ファイバー5の中を通った往復の時間から、放光位置6の放光した時間を算出する。放光位置6の前記算出した前記放光した時間から、距離計測受光器3Aの前記受光した時間を使って、前記空間を飛行した計測距離7の距離を演算する説明図。
ロボット19の作業位置8に組み込まれた距離計測発光器4Aが発光して空間を飛行する計測距離光7を、距離計測器2に組み込まれた距離計測受光器3Aを使って受光する。前記発光した前記計測距離光を、入射されたロボット19の駆動機構内に配置された光ファイバー5の中を通った先端の、距離計測器2に組み込まれた距離計測受光器3Aの位置の距離計測受光器3Bを使って受光する。距離計測器2に組み込まれた距離計測発光器4Bの発光した計測距離光を、入射されたロボット19の駆動機構内に配置された光ファイバー5の中を通った作業位置8の距離計測発光器4Aの位置の先端で派生する反射波の反射光がファイバー5の中を逆行して、前記入射した光ファイバー5の先端の距離計測発光器4Bに設けた距離計測受光器3Bを使って受光して、ファイバー5の中を通った往復の時間から、ファイバー5の中を通った時間を算出する。又は、作業位置8に組み込まれた距離計測発光器4Aの発光した前記計測距離光を、入射されたロボット19の駆動機構内に配置された光ファイバー5の中を通って、距離計測器2に組み込まれた距離計測受光器3Bの位置の先端で派生する反射波の反射光がファイバー5の中を逆行して、前記入射した光ファイバー5の先端の作業位置8の距離計測発光器4Aに設けた距離計測受光器3C使って受光して、ファイバー5の中を通った往復の時間から、ファイバー5の中を通った時間を算出する。前記距離計測受光器3Aの受光した時間から、前記算出したファイバー5の中を通った時間を使って、前記距離計測発光器4Aが発光した時間を逆算する。前記逆算した前記距離計測発光器4Aの発光した時間から前記距離計測受光器3Aの受光した時間を使って、作業位置8から距離計測器2までの計測距離光7を演算する説明図。
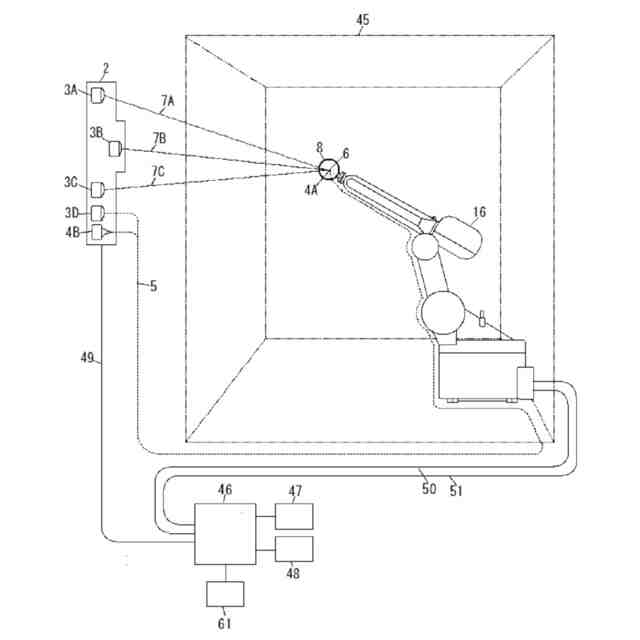
距離計測2の距離計測発光器4を発光して入射したロボット19の駆動機構に配置された光ファイバー5を通って、ロボット19の作業位置8の放光位置6で放光された距離計測光が、空間の最近の計測距離7A、7B、7Cを飛行して、距離計測器2に組み込まれた異なる位置の距離計測受光器3A、3B、3Cを使って受光する。光ファイバー5の先端の作業位置8からの反射波が光ファイバー5を逆行して、距離計測器2に組み込まれた距離計測受光器3Dを使って受光する。光ファイバー5を通った往復の時間を使って、作業位置8の放光位置6の放光した時間を算出する。作業位置8の放光位置6の前記放光した時間から距離計測2の距離計測受光器3A、3B、3Cの前記受光した各時間を使って、距離計測2の異なる位置の距離計測受光器3A、3B、3Cが計測した計測距離7A、7B、7Cからなるロボット19の作業位置8の距離の位置を演算して計測する。距離計測器2計測する計測距離7A、7B、7Cからなる位置にロボット19の作業位置8の駆動数値を関連付けた駆動させて、ロボット19の操作を距離と方向の指示する操作卓47の外部信号と、ロボット19の操作を音声指示器の距離と方向の音声を使って指示する説明図。
ロボット19の作業位置8に組み込まれた距離計測発光器4Aが発光して空間を飛行する距離計測光を、距離計測器2に組み込まれた距離計測受光器3A、3B、3Cを使って受光する。前記発光した前記計測距離光を入射されたロボット19の駆動機構内に配置された光ファイバー5の中を通った先端の、距離計測器2に組み込まれた距離計測受光器3Dを使って受光する。距離計測発光器4Aの前記発光して入射された光ファイバー5の中を通った時間を使って、距離計測発光器4Aの前記発光した時間を算出する。前記算出した発光した時間と前記空間を飛行して受光した時間を使って、前記空間を飛行した計測距離7A、7B、7Cからなる位置を演算する説明図。
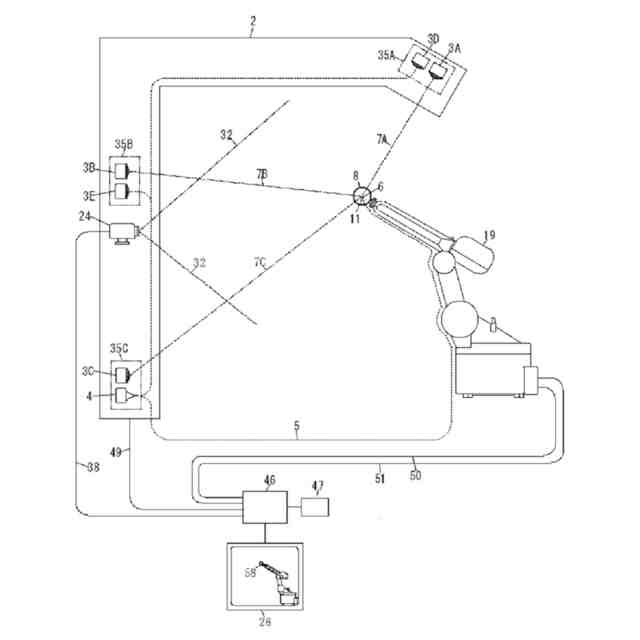
距離計測器2に組み込まれた距離計測ユニット35Cの距離計測発光器4の発光する距離計測光が入射された、ロボット19の駆動機構内を配置された光ファイバー5の中を通って、ロボット19の作業位置8の光ファイバー5の末端の放光位置6で空間に放光される。又同時に、前記入射させて光ファイバー5の中を通った前記距離計測光を、距離計測器2に組み込まれたそれぞれが離れた距離計測ユニット35A、35Bの距離計測受光器3D、3Eを使って受光して、距離計測ユニット35A、35B、35Cの距離計測発光器4の発光した時間を共有する。前記放光されて空間を飛行する前記距離計測光を、距離計測器2に組み込まれた距離計測ユニット35A、35B、35Cの前記発光した時間を共有する距離計測受光器3A、3B、3Cを使って受光する。距離計測発光器4の前記発光した時間と距離計測受光器3A、3B、3Cの前記受光した時間から前記光ファイバー5の中を通ってた時間を減じた時間を使って、ロボット19の作業位置8の放光位置6から距離計測器2の距離計測ユニット35A、35Cの距離計測受光器3A、3B、3Cまでの計測距離7A、7B、7Cからなる位置を、距離計測器2に組み込まれたテレビカメラの撮影するテレビ画面上に映る作業位置の画像58の位置と関連付ける説明図。
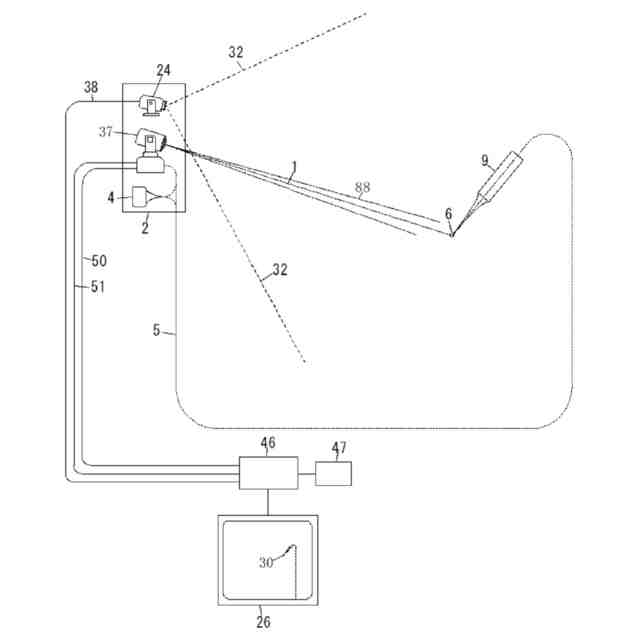
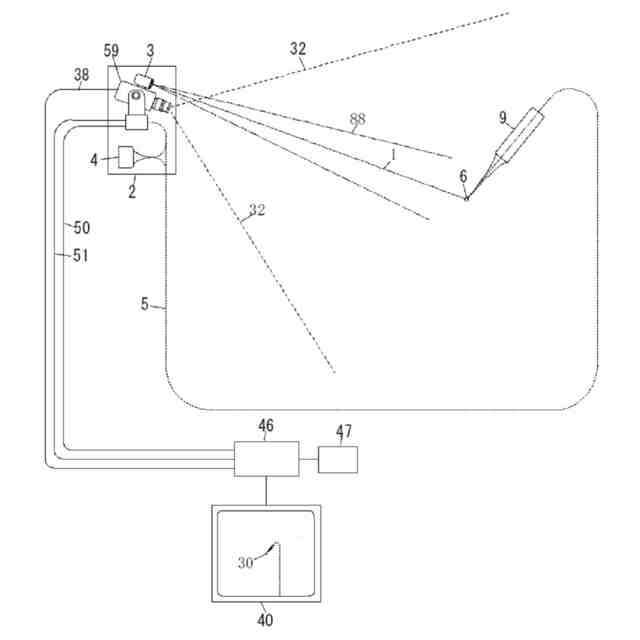
距離計測器2に組み込まれた距離計測発光器4の発光する距離計測光の入射させた光ファイバー5を通って、先端の指示具9の放光位置6で放光されたて3次元空間52を飛行する計測距離光1を、距離計測器2に組み込まれたテレビカメラ24の撮影するテレビ画面26に映る距離計測光の放射位置の画像30の位置に関連付けた、距離計測器2に組み込まれた駆動機構の数値制御の距離計測受光機37を使って受光する。数値制御の距離計測受光機37が計測した計測距離光1を使って、距離計測器2から3次元空間52の任意の指示具9の放光位置6までの距離を演算して計測する説明図
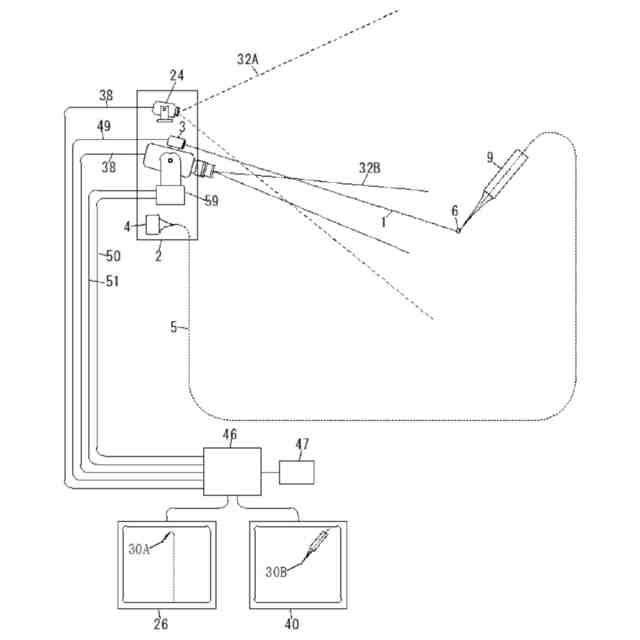
距離計測器2に組み込まれた距離計測発光器4の発光する距離計測光又は撮影用の光を入射させた光ファイバー5を通って、先端の指示具9の放光位置6で放光されたて3次元空間を飛行する距離計測光1又は撮影用の光を距離計測器2に組み込まれた駆動機構の駆動する数値制御のテレビカメラ59のテレビ画面40上の放射位置の画像30又は撮影用の光が、テレビ画面40の中央の位置に映る様に前記駆動機構を駆動して撮影する。数値制御のテレビカメラ59の前記中央の位置方向からの距離計測光1を受光する様に距離計測受光器3を、前記駆動する駆動機構に取り付ける。指示具9の放光位置6からの距離計測光1を、受光する範囲を狭めた距離計測受光器3を使って受光する。距離計測受光器3が計測した距離計測1を使って、距離計測器2から3次元空間52の任意の指示具9の放光位置6までの距離を演算して計測する説明図。
距離計測器2に組み込まれた距離計測発光器4の発光する距離計測光を入射させた光ファイバー5を通って、先端の指示具9の放光位置6で放光されたて3次元空間の最近の計測距離7を飛行して距離計測器2に組み込まれたテレビカメラ24の撮影するテレビ画面26に映る前記放射位置の画像30Aの位置に関連付けた駆動数値を使って、数値制御のテレビカメラ59の撮影するテレビ画面40の中央の位置に、前記距離計測光の放射位置の画像30Bを撮影して、テレビ画面40の前記中央方向の前記距離計測光を計測する様に、数値制御のテレビカメラ59に取り付けた、距離計測器3を使って前記距離計測光を受光する説明図。
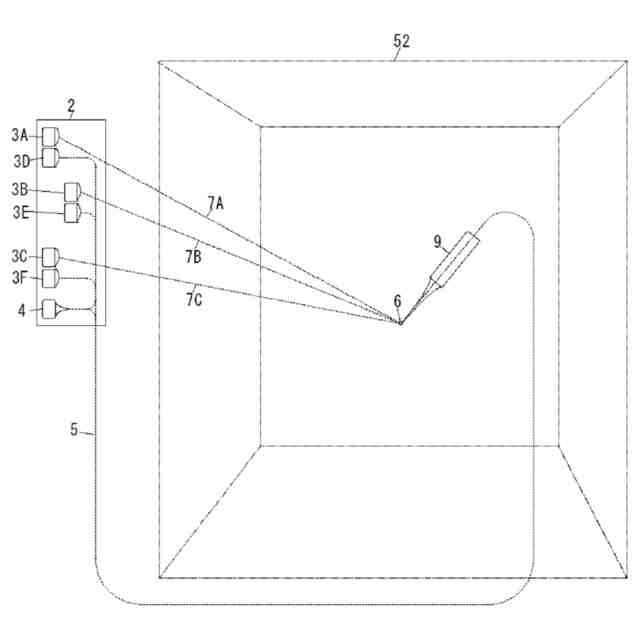
距離計測器2の距離計測発光器4の発光する距離計測光の入射させた光ファイバー5を通って、先端の指示具9の放光位置6で放光されたて離計測光が3次元空間52を最近の計測距離7A、7B、7Cを飛行して、距離計測器2に組み込まれた異なる位置の距離計測受光器3A、3B、3Cを使って受光する。距離計測発光器4の発光する距離計測光を距離計測受光器3A、3B、3Cの近くの距離計測受光器3D、3E、3Fを使って受光することで、距離計測発光器4の発光した時間を共有する。異なる位置の距離計測受光器3A、3B、3Cが計測した計測距離7A、7B、7Cからなる、3次元空間52の任意の距離の位置を距離計測器2から演算して計測する説明図。
距離計測器2に組み込まれた距離計測発光器4の発光する距離計測光の入射させた光ファイバー5を通って先端の指示具9の放光位置6で放光されたて、3次元空間52を最近の計測距離7A、7B、7Cを飛行する前記距離計測光を、距離計測器2に組み込まれたテレビカメラ24の撮影するテレビ画面26に映る距離計測光の放射位置の画像30の位置に関連付けた、距離計測器2に組み込まれた異なる位置の、駆動数値の駆動機構を駆動して、距離計測受光器37A、37B、37Cを使って距離計測光を受光する。異なる位置の数値制御の距離計測受光器37A、37B、37Cが計測した計測距離7A、7B、7Cからなる距離の位置を、計測器2から3次元空間52の任意の放光位置6までの距離の位置を演算して計測する説明図。
ロボットの作業空間45を、ロボット19を駆動させる作業位置8Aを、指示具9Aを使って距離計測器2からの計測距離7A、7B、7Cの距離すらなる位置を計測し、次にロボット19を駆動させる作業位置8Bに指示具9Bを使って距離計測器2からの計測距離7D、7E、7Fの距離すらなる位置を計測し、次にロボット19を駆動させる作業位置8Cに指示具9Cを使って距離計測器2からの計測距離7G、7H、7Iの距離すらなる位置を計測する。計測距離7A、7B、7Cからなる距離の位置と計測距離7D、7E、7Fからなる距離の位置と計測距離7G、7H、7Iからなる距離の位置を続けて計測する。ロボット19の作業空間45の作業位置8Aから作業位置8Bを通って作業位置8Cまでの距離の位置の関係を取得する説明図。
ロボット19の作業空間45にロボット19の作業位置8Aを、図4で計測した、距離計測器2からの前記計測距離7A、7B、7Cからなる距離の位置の加工をし、次に、作業位置8Bに移動して、図4で計測した距離計測器2からの前記計測距離7D、7E、7Fからなる距離の位置の加工をする。更に、作業位置8Cに移動して、図4で計測した距離計測器2からの前記計測距離7G、7H、7Iからなる距離の位置に設置をする。作業位置8Aからの距離計測光1A、1B、1Cを距離計測受光器3A、3B、3Cか受光して確認し、作業位置8Aから作業位置8Bへの移動中も計測を続けて、作業位置8Bからの距離計測光1D、1E、1Fを距離計測受光器3A、3B、3Cか受光して確認し、作業位置8Cからの距離計測光1G、1H、1Iを距離計測受光器3A、3B、3Cか受光して確認する説明図。
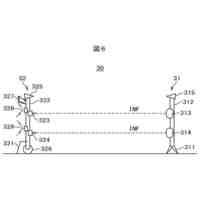
歩行する歩足ロボット20の歩行足13A、13B、13C、13D、13E、13Fの足の位置に、距離計測発光器4ABCDEFからの光ファイバー5A、5B、5C、5D、5E、5Fに繋がる放光位置6A、6B、6C、6D、6E、6Fを設けて、周期をずらせて距離計測発光器4ABCDEFの各発光する距離計測光1A、1B、1C、1D、1E、1Fを、歩足ロボット20の下部に設けた距離計測受光器3A、3B、3Cを使って、前記周期をずらせて受光して、歩行足13A、13B、13C、13D、13E、13Fの位置を演算して計測する説明図。
計測する位置を指定する指示具9を使って、指示具9を通る光ファイバー5の末端の先端の放光位置6からを、距離計測物10の計測位置11に接着させて、計測位置11から距離計測光が空間に放光12されて計測距離7を計測する。指示具9に組み込まれたスイッチを使って計測の操作と計測した距離を表示する表示器の説明図。
距離計測器2の距離計測発光器4の発光した距離計測光を注入させた光ファイバー5を通って、指示具9の先端の放光位置6から距離計測光1Dを計測位置11方向に光学レンズを使って集光させて照射する。計測位置11から放光位置6の方向に向う距離計測光1Dの反射光を、放光位置6の光ファイバー5の先端から再注入させた光ファイバー5を通って逆行する距離計測光の反射光を、距離計測発光器4の位置に設けた距離計測受光器3を使って受光する。前記発光した時間と前記受光した時間から、概知の光ファイバー5を通った時間を減じた時間を使って、距離計測光1Dの飛行距離を演算する。指示具9に取り付けたテレビカメラ24を使って計測位置11を撮影する説明図。
距離計測器2の距離計測発光器4の発光した距離計測光を注入させた光ファイバー5を通って先端の放光位置6から光学レンズを使って集光させて計測位置11の方向に距離計測光1Aを照射する。計測位置11に前記照射された反射光の距離計測光1B、1C、1Dを距離計測器2の距離計測受光器3B、3C、3Dを使って受光する。距離計測発光器4の発光した距離計測光を注入させた光ファイバー5を通って先端の放光位置6から放光して、計測位置11からの距離計測光1Aの反射光を再注入させた光ファイバー5を通って、距離計測発光器4の位置に設けた距離計測発光器3Aを使って受光した、距離計測発光器4から計測位置11までを往復した時間を使って、計測位置11の反射時間を算出する。前記反射時間から距離計測発光器4B、4C、4Dの受光した時間を使って、計測位置11から距離計測発光器3B、3C、3Dまでの距離の位置を演算するする説明図。
距離計測器2の距離計測発光器4の発光した距離計測光を注入させた光ファイバー5Aを通って先端の指示具9Aの放光位置6Aから光学レンズを使って集光させて計測位置11Aの方向に距離計測光1Aを照射する。距離計測器2の距離計測発光器4の発光した時間と、計測位置11Aからの反射光の光ファイバー5Aの先端から再注入した光ファイバー5を通って逆行する前記反射光を距離計測受光器3Aが受光する。距離計測発光器4の発光した時間から距離計測受光器3Aの受光した時間を使って、計測位置11Aの前記反射した時間を逆算する。前記逆算した計測位置11Aの反射した時間から、前記反射した距離計測光1B、1C、1Dを距離計測器2の距離計測受光器3B、3C、3Dを使って受光した時間を使って、計測位置11Aから距離計測器2の距離計測受光器3B、3C、3Dまでの3次元の距離の位置を演算する。同様にして、距離計測器2の距離計測発光器4の発光した距離計測光を注入させた光ファイバー5Bを通って先端の指示具9Bの放光位置6Bから光学レンズを使って集光させて計測位置11Bの方向に距離計測光1Eを照射する。計測位置11Bから反射した距離計測光1F、1G、1Hを距離計測器2の距離計測受光器3B、3C、3Dを使って受光した時間を使って、計測位置11Bから距離計測器2の距離計測受光器3B、3C、3Dまでの3次元の距離の位置を演算する。3次元の距離計測器2から3次元の計測位置11Aまでの距離の位置と3次元の距離計測器2から3次元の計測位置11Bまでの距離の位置を使って、3次元の計測位置11Aと3次元の計測位置11Bの3次元の計測距離7の距離の位置関係を演算する説明図。
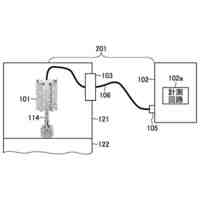
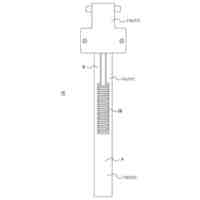
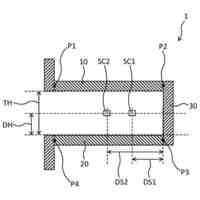
光ファイバー5の指示具9の放光位置6を距離計測受光器3Aに接着して光ファイバー5の長さを、距離計測光の通過した時間を計測して校正する説明図。
距離計測器2の距離計測発光器4Aの発光した距離計測光Aを入射した光ファイバー5Aを通って、エンジン21の計測位置11Aの放光位置6Aから放光した距離計測光1A、1B、1Ⅽを、距離計測器2の距離計測受光器3A、3B、3Ⅽを使って直接受光して距離の位置を計測する。時間をずらせて、距離計測器2の距離計測発光器4Bの発光した距離計測光Bを入射した光ファイバー5Bを通って、ロボット19の駆動機構の駆動位置8に配置した放光位置6Bから放光した距離計測光1D、1E、1Fを、距離計測器2の距離計測受光器3A、3B、3Ⅽを使って直接受光して距離の位置を計測する。ロボット19の駆動機構の駆動位置8を、エンジン21の前記計測した計測位置11Aの距離の位置に合わせる様に、ロボット19の駆動位置8を、距離計測器2から距離計測光1D、1E、1Fの距離の位置を計測しながら、エンジン21の計測位置11Aに駆動する説明図。
距離計測器2の距離計測発光器4Aの発光した距離計測光1を入射した光ファイバー5Aを通って、ロボット19の駆動機構の駆動位置8に配置した放光位置6から放光した距離計測光1A、1B、1Dを、距離計測器2の距離計測受光器3A、3B、3Ⅽを使って直接受光して距離の位置を計測する。時間をずらせて、距離計測器2の距離計測発光器4Bの発光した距離計測光2を入射した光ファイバー5Bを通って、ロボット19の駆動機構の駆動位置8に配置した放光位置6から光学レンズを使って集光して照射した距離計測光1Gを、エンジン21の照射位置42に照射した反射光の距離計測光1D、1E、1Fを距離計測受光器3A、3B、3Ⅽを使って受光して距離の位置を計測する。距離計測光1A、1B、1Dからなる駆動位置8の距離の位置を、距離計測光1D、1E、1Fからなる照射位置42の距離の位置に駆動位置8の距離の位置を駆動する説明図。
ロボット19の駆動機構の駆動位置に設けた距離計測発光器4Aの発光した距離計測光1を入射した光ファイバー5Aを通って距離計測器2の距離計測受光器3Dを使って受光する。距離計測発光器4Aの放光した距離計測光1A、1B、1Dを、距離計測器2の距離計測受光器3A、3B、3Ⅽを使って直接受光して距離の位置を計測する。時間をずらせて、ロボット19の駆動機構の駆動位置に設けた距離計測発光器4Bの発光した距離計測光2を入射した光ファイバー5Bを通って距離計測器2の距離計測受光器3Eを使って受光する。距離計測発光器4Bの発光した距離計測光2の光学レンズを使って集光した距離計測光1Gを、エンジン21の照射位置42に照射した反射光の距離計測光1D、1E、1Fを距離計測受光器3A、3B、3Ⅽを使って受光して距離の位置を計測する。距離計測光1A、1B、1Dからなる駆動位置8の距離の位置を、距離計測光1D、1E、1Fからなる照射位置42の距離の位置に駆動位置8を駆動する説明図。
距離計測器2の距離計測発光器4Aの発光した距離計測光Aを入射した光ファイバー5Aを通って、ロボット19の作業位置8に取付けた指示具9の先端から放光した距離計測光1A、1B、1Ⅽを距離計測器2の距離計測受光器3A、3B、3Ⅽを使って直接受光して距離計測光1A、1B、1Ⅽからなる作業位置8の距離の位置を計測する。時間をずらせて、距離計測器2の距離計測発光器4Bの発光した距離計測光Bを入射した光ファイバー5Bを通って、ロボット19の作業位置8に取付けた指示具9の先端から光学レンズを使って集光した距離計測光1Gをエンジン21の加工位置41付近に照射する。前記照射した照射位置42をテレビカメラ24の撮影するテレビ画面26A上に映る照射位置の画像44Aの位置が、テレビ画面26Aの中央の位置に映る様に、指示具9に取り付けたテレビカメラ24の撮影する、テレビ画面26A上に映る加工位置の画像43Aが、テレビ画面26B上の照射位置の画像44Bの位置に映る様にロボット19の駆動機構を駆動する。距離計測光1Gの照射位置が加工位置41に照射された反射光の距離計測光1D、1E、1Fを、距離計測器2の距離計測受光器3A、3B、3Ⅽを使って受光して、距離計測光1D、1E、1Fからなる距離の位置を計測する。図19で説明した距離計測光1Gの飛行した時間を使って、指示具9から加工位置41までの距離を演算して、前記演算した距離を減ずる様にロボット19の駆動機構を駆動する説明図。
距離計測ユニット35に組み込まれた距離計測器2の距離計測発光器4を発光して入射した光ファイバー5の先端のロボット19の作業位置8から放光した距離計測光を、距離計測器2の距離計測受光器3A、3B、3Cを使って受光して、距離計測器2の距離計測受光器3A、3B、3Cからロボット19の作業位置8の放光位置6までの距離計測光7A、7B、7Cからなる距離の位置を演算する。距離計測ユニット35に組み込まれた、テレビカメラ24を使ってテレビカメラの撮影範囲32にロボット19の作業位置8の駆動範囲を撮影する。テレビ画面26上の作業位置の画像58に映る固有の前記距離計測光の放光位置の画像30を識別する。テレビ画面26上の2次元空間の位置に、前記識別した作業位置の画像58の2次元の位置に、前記計測した距離の位置を付して、コンビューターの把握する3次元空間に展開する説明図。
距離計測ユニット35に組み込まれた、テレビカメラ24の撮影するテレビ画面26上で画像認識の方法で識別した加工物の画像57の位置に関連付けられた、距離計測ユニット35に組み込まれた、数値制御の駆動機構で駆動するレーザー距離計測機55の前記駆動数値を使って、距離計測用のレーザー光を前記画像に映る加工物54に照射して、距離計測ユニット35のレーザー距離計測機55から加工物54までの距離と方向を計測する。距離計測ユニット35に組み込まれた距離計測器2の距離計測発光器4の発光する距離計測光1を入射させた光ファイバー5を、ロボット19の駆動する作業位置8に配置させた、光ファイバー5の末端の放光位置6で空間に放光される。前記放光されて空間を飛行する距離計測光を、距離計測器2の距離計測受光器3A、3B、3Cを使って受光して、距離計測ユニット35の距離計測器2からロボット19の駆動する作業位置8までの計測距離7A、7B、7Ⅽからなる距離の位置を計測する。距離計測ユニット35の距離計測器2から作業位置8までの前記計測した距離の位置に相当する前記した加工物54までの距離と方向に前記関連付けた、ロボット19の前記駆動数値を使って作業位置8を加工物54の位置に駆動する。前記計測した計測距離7A、7B、7Ⅽからなる距離の位置を、レーザー距離計測機55の前記計測した距離と方向に合わせる様にロボット19の駆動機構を駆動して加工物54に作業位置8の加工作業する説明図。
距離計測ユニット35に組み込まれた、テレビカメラ24の撮影するテレビ画面26上で画像認識の方法で識別した加工物の画像57Aの位置に関連付けられた、距離計測ユニット35に組み込まれた、数値制御の駆動機構で駆動する数値制御のテレビカメラ59の前記駆動数値を使って、数値制御のテレビカメラ画面40上の中央の位置に映る加工物の画像57Bを撮影する。距離計測用のレーザー光56を前記中央の位置を照射する様に、数値制御のテレビカメラ59に取り付けたレーザー距離計測器60を使って、数値制御のテレビカメラ画面40上に映る加工物54との距離と方向を計測する。距離計測ユニット35に組み込まれた距離計測器2の距離計測発光器4の発光する距離計測光を入射させた光ファイバー5をロボット19の駆動する作業位置8に配置させた光ファイバー5の末端の放光位置6で空間に放光される。前記放光されて空間を飛行する距離計測光を、距離計測器2の距離計測受光器3A、3B、3Cを使って受光して、距離計測ユニット35の距離計測器2からロボット19の駆動する作業位置8までの計測距離7A、7B、7Ⅽからなる距離の位置を計測する。レーザー距離計測器60の前記計測した距離と方向に相当する、前記計測した計測距離7A、7B、7Ⅽからなる距離の位置に関連付けた駆動数値を使って、ロボット19の駆動機構を駆動して加工物54に作業位置8の駆動して加工作業する説明図。
距離計測ユニット35に組み込まれた、テレビカメラ24の撮影するテレビ画面26上で画像認識の方法で識別した加工物の画像57Aの位置に関連付けられた、距離計測ユニット35に組み込まれた、数値制御の駆動機構で駆動するレーザー距離計測機55の前記駆動数値を使って、距離計測用のレーザー光56を前記画像に映る加工物54に照射して、距離計測ユニット35のレーザー距離計測機55から加工物54までの距離と方向を計測する。同時に、加工物の画像57Aの位置に関連付けられた、距離計測ユニット35に組み込まれた、数値制御の駆動機構の撮影方向を駆動する数値制御のテレビカメラ59の前記駆動数値を使って、数値制御のテレビカメラ画面40A上の中央の位置に映る加工物の画像57Bを撮影する。前記計測した距離と方向を使って数値制御の駆動機構の画角のズーム機構を駆動して、数値制御のテレビカメラ画面40B上の拡大した加工物の画像57Cを撮影する。テレビカメラ画面40B上に映る加工物の画像57Cを再度画像認識の方法で識別する。同時に、テレビカメラ画面40B上に映る照射位置の画像44Aを識別する。前記識別した射位置の画像44Aが加工物の画像57Cの位置に映る様に、レーザー距離計測機55の駆動機構の駆動位置を修正する。テレビカメラ画面40C上に映る加工物の画像57Dの位置に照射位置の画像44Bが照射される事を識別する。前記駆動位置を前記修正したレーザー距離計測機55から加工物の画像57Dまでの距離と方向を再度計測する。距離計測ユニット35に組み込まれた距離計測器2の距離計測発光器4の発光する距離計測光を入射させた光ファイバー5を、ロボット19の駆動する作業位置8に配置させた、光ファイバー5の末端の放光位置6で空間に放光される。前記放光されて空間を飛行する距離計測光を、距離計測器2の距離計測受光器3A、3B、3Cを使って受光して、距離計測ユニット35の距離計測器2からロボット19の駆動する作業位置8までの計測距離7A、7B、7Ⅽからなる距離の位置を計測する。レーザー距離計測機55の前記再度の計測した距離と方向に相当する、前記計測した計測距離7A、7B、7Ⅽからなる距離の位置に関連付けられた、ロボット19の駆動機構を駆動して加工物54に作業位置8を駆動して加工作業する説明図。
距離計測ユニット35に組み込まれた、テレビカメラ24の撮影するテレビ画面26上に映る加工物の画像57Aを、画像認識の方法で識別する。作業台36上の前記識別した加工物の画像57Aの位置に、関連付けられた駆動数値を使って、数値制御のレーザー距離計測機55の駆動機構を駆動して、加工物54Aとの距離と方向を計測する。前記距離と方向に相当する前記距離の位置に関連付けたロボット19の駆動数値を使って、作業台36の加工物54Aの位置に作業位置8を駆動して加工物54Aを取得する。次に、テレビ画面26上に映る画像を、画像認識の方法で識別した加工位置の画像43Aの位置に関連付けられた駆動数値を使って、数値制御のレーザー距離計測機55の駆動機構を駆動して、加工位置41との距離と方向を計測する。前記距離と方向に相当する前記距離の位置に関連付けたロボット19の駆動数値を使って、数値制御のレーザー距離計測機55を使って計測した距離と方向に合わせる様に作業位置8を駆動して加工位置41の加工物54Bを加工する説明図。
距離計測ユニット35に組み込まれた距離計測器2の距離計測発光器4の発光する距離計測光を入射させた光ファイバー5を、ロボット19の駆動する作業位置8に配置させた、光ファイバー5の末端の放光位置6で空間に放光される。前記放光されて空間を飛行する距離計測光を、距離計測器2の距離計測受光器3A、3B、3Cを使って受光して、距離計測ユニット35の距離計測器2からロボット19の駆動する作業位置8までの計測距離7A、7B、7Ⅽからなる距離の位置を計測する。前記計測した距離の位置に相当する距離と方向に関連付けられた駆動数値を使って、数値制御のテレビカメラ59の駆動機構を駆動して、数値制御のテレビ画面40Ⅽ上の前記中央の位置に作業位置の画像58を撮影し、作業位置8に取り付けたテレビカメラ24を使って近接したテレビ画面26上に加工物の画像57Ⅽを撮影する説明図。
距離計測ユニット35に組み込まれた、距離計測器2の距離計測発光器4の発光する距離計測光1を入射させた光ファイバー5を、前記ロボット19の3次元空間を駆動する作業位置8に配置させた光ファイバー5の末端の放光位置6で空間に放光される。前記放光されて空間を飛行する距離計測光を、距離計測器2の距離計測受光器3A、3B、3Cを使って受光して、距離計測ユニット35の距離計測器2からロボット19の駆動する前記作業位置8までの計測距離7A、7B、7Ⅽとからなる距離の位置を計測する。前記計測した距離の位置に相当する前記距離と方向に前記関連付けた、数値制御のテレビカメラ59の駆動機構の前記駆動数値とズーム駆動機構の前記駆動数値を使って駆動して、数値制御のテレビ画面40C上の前記中央の位置に作業位置の画像58Cを追尾して撮影する説明図。
距離計測器2の距離計測発光器4の発光する距離計測光を入射させた光ファイバー5を、ロボット19の駆動する作業位置8に配置させた光ファイバー5の末端の放光位置6で空間に放光される。前記放光されて空間を飛行する距離計測光を、距離計測器2の距離計測受光器3A、3B、3Cを使って受光して、距離計測ユニット35の距離計測器2からロボット19の駆動する作業位置8までの計測距離7A、7B、7Ⅽからなる距離の位置を計測する。前記計測した距離の位置に相当する前記計測した距離と方向に関連付する数値制御のテレビカメラ59の駆動数値を使って、数値制御のテレビカメラ59の撮影方向を変える駆動機構と撮影の画角を変える駆動機構を駆動して、数値制御のテレビ画面40C上の中央の位置に映る様に作業位置の画像58Cが映る様に撮影する。ロボット19の駆動する作業位置8を、数値制御のテレビカメラ59を使って、数値制御のテレビ画面40C上の中央の位置に作業位置の画像58Cが映る様に撮影する説明図。
数値制御の駆動機構のロボット19の3次元空間を駆動する作業位置8を、インターネット網77を介して映る、距離計測ユニット35に組み込まれた、距離計測器2の距離計測発光器4の発光した距離計測光を入射した光ファイバー5を通って、ロボット19の作業位置8に取付けた指示具9の先端から放光した距離計測光を距離計測器2の距離計測受光器3A、3B、3Ⅽを使って直接受光して計測した計測距離7A、7B、7Ⅽからなる距離の位置を計測する。前記した距離の位置に相当する距離と方向に前記関連する駆動数値を使って、数値制御のレーザー距離計測機58の駆動機構を駆動して、ロボット19の作業位置8との距離を計測して、前記関連する駆動数値と前記計測した距離を使って、数値制御のテレビカメラ59の駆動機構を駆動して数値制御のテレビ画面40Ⅽ上の中央の位置に作業位置の画像58Ⅽを撮影する説明図。
ロボット19と作業員86の協業する場において、テレビカメラ24の撮影するテレビ画面26に映る作業員の画像87Aを、画像認識の方法を使って追尾して識識する。テレビ画面26上の前記識別して映る作業員の画像87Aの位置に関連付けた、数値制御のレーザー距離計測機55の駆動数値を使って、距離計測用のレーザー光56Aを作業員86に照射して、作業員86との距離と方向を追尾して計測する。 同時に、テレビ画面26上の前記識別して映る作業員の画像87Aの位置に関連付けた、数値制御のテレビカメラ59の撮影する方向を変える駆動数値と前記計測した作業員86との距離を使って、撮影する画角を変える駆動数値を使って、数値制御のテレビ画面40に拡大した作業員の画像87Bを撮影する。協業する場のロボット19の駆動機構の駆動する位置に配置された、距離計測器の光ファイバーを使って、ロボット19の駆動する位置を連続して距離の位置を計測する。コントローラー46に組み込まれたコンピューター上に構築する3次元空間内に、前記計測した作業員86の距離と方向とロボット19の駆動する位置を連続して距離の位置を展開して、コンピューター上に構築する3次元空間内に、作業員86の距離と方向とロボット19の駆動機構の駆動する距離の位置の間隔を演算して協業する場を安全を監視する。数値制御のテレビカメラ59の撮影する数値制御のテレビ画面40に拡大した作業員78Bの動きを、AI等の学習機能を使って、ロボット19の駆動機構の接近を監視する説明図。
距離計測発光器4が発光して入射した光ファイバー5を通った距離計測光を指示具9Aの先端の放光位置6を、エンジン21の計測位置11に接着して放光し、距離計測受光器3A、3B、3Cまでを飛行した最近の計測距離7A、7B、7Cを計測して距離計測器2と計測位置11との距離の位置関係を計測する。距離計測発光器4A、4B、4C、4Dが時間をずらせて発光して入射した光ファイバー5A、5B、5C、5Dを通った距離計測光を指示具9Aの手元に設けた放光位置6A、6B、6C、6Dから時間をずらせて放光して、距離計測受光器3A、3B、3Cまでの飛行した距離を計測して距離計測器2と指示具9Aの手元に設けた放光位置6A、6B、6C、6Dとの距離の位置関係を計測する。指示具9Aと計測位置11との距離を計測して、エンジン21の計測位置11の加工作業をする作業位置8に取り付けた工具の加工方向を、指示具9Aの手元に設けた放光位置6A、6B、6C、6Dの距離の位置を計測して取得する。ロボットの作業位置に取付ける加工具の加工方向を、実施する加工具又は加工具の治具を使って、距離計測受光器3A、3B、3Cまでの実測した距離を記憶させる説明図。
距離計測用の指示具9の先端を、エンジン21の計測位置11に接着して、距離計測発光器4A、4B、4C、4Dが時間をずらせて発光して入射した光ファイバー5A、5B、5C、5Dを通った距離計測光を指示具9の手元に設けた放光位置6A、6B、6C、6Dから時間をずらせて放光する。前記放光した放光位置6A、6B、6C、6Dから空間の最近の距離を飛行した各距離計測光を距離計測受光器3A、3B、3Cを使って受光する。距離計測器2の距離計測受光器3A、3B、3Cと指示具9の手元に設けた放光位置6A、6B、6C、6Dとの距離の位置関係を計測する。距離計測器2の各距離計測受光器3A、3B、3Cからの指示具9の各放光位置6A、6B、6C、6Dとの距離の位置の関係を使って、エンジン21の計測位置11に接着する指示具9の方向を演算する。前記演算した指示具9の方向と概知の指示具9の先端までの距離と、離計測器2の距離計測受光器3A、3B、3Cと放光位置6A、6B、6C、6Dとの距離の位置を使って、指示具9の放光位置6A、6B、6C、6Dを介して、距離計測器2からエンジン21の計測位置11の距離の位置を計測する説明図。
距離計測用の指示具9の先端に設けた距離計測発光器4を発光して集光した距離計測発光7Gを、エンジン21の計測位置11に照射して、計測位置11からの反射光を指示具9に設けた距離計測発光器3を使って受光して、指示具9の先端から計測位置11との距離を計測する。距離計測器2の距離計測発光器4A、4B、4C、4Dが時間をずらせて発光して入射した光ファイバー5A、5B、5C、5Dを通った距離計測光を指示具9の手元に設けた放光位置6A、6B、6C、6Dから時間をずらせて放光する。前記放光した放光位置6A、6B、6C、6Dから空間の最近の距離を飛行した各距離計測光を距離計測受光器3A、3B、3Cを使って受光して、指示具9の向きと、距離計測器2の距離計測受光器3A、3B、3Cと指示具9の手元に設けた放光位置6A、6B、6C、6Dとの距離の位置関係を計測する。前記計測した指示具9の先端から計測位置11との距離と、前記計測した指示具9の向きと前記距離計測受光器3A、3B、3Cと放光位置6A、6B、6C、6Dとの距離の位置関係を使って、距離計測器2から計測位置11との距離の位置を演算する説明図。
距離計測用の指示具9の先端に設けた距離計測発光器4を発光して光学レンズを使って集光した距離計測発光7Gを、エンジン21の計測位置11に照射して、計測位置11からの反射光を指示具9の先端から入射させて光ファイバー5を通って距離計測器2の距離計測受光器3を使って受光する。概知の指示具9を通った時間を減じて、指示具9の先端から計測位置11までの距離を演算する。距離計測器2の距離計測発光器4A、4B、4C、4Dが時間をずらせて発光して入射した光ファイバー5A、5B、5C、5Dを通った距離計測光を指示具9の手元に設けた放光位置6A、6B、6C、6Dから時間をずらせて放光する。前記放光した放光位置6A、6B、6C、6Dから空間の最近の距離を飛行した各距離計測光を距離計測受光器3A、3B、3Cを使って受光して、距離計測器2の距離計測受光器3A、3B、3Cと指示具9の手元に設けた放光位置6A、6B、6C、6Dとの距離の位置関係と指示具9の向きとを演算して計測する。前記計測した指示具9の先端から計測位置11との距離と、前記計測した指示具9の向きと前記距離計測受光器3A、3B、3Cと放光位置6A、6B、6C、6Dとの距離の位置関係を使って、距離計測器2から計測位置11との距離の位置を演算して計測する。距離計測発光7Gの照射した照射位置42を撮影する様に、指示具9にテレビカメラ24を取り付ける説明図。
距離計測器2に組み込まれた、距離計測発光器4が発光して入射した光ファイバー5を通った距離計測光を熔接工具の治具に合わせた指示具9の先端の放光位置6を、加工物54Aと加工物54Bの熔接作業をする加工位置41Aに接着して放光して、距離計測受光器3A、3B、3Cまでを飛行した最近の計測距離1A、1B、1Cからなる距離の位置を計測して距離計測器2と加工位置41Aとの距離の位置関係を計測する。指示具9を熔接する加工位置41Aから加工位置41Bまでの円周を熔接する個所に沿ってなぞる様に移動させる。同時に、指示具9の手元に設けた放光位置6Aの放光した、距離計測受光器3A、3B、3Cまでを飛行した最近の計測距離1D、1E、1Fからなる距離の位置を計測して距離計測器2と指示具9の放光位置6Aとの距離の位置関係を計測する。同様にして、放光位置6B、6C、6Dから放光して、距離計測受光器3A、3B、3Cまでを飛行した最近の計測距離を計測して距離計測器2と放光位置6B、6C、6Dとの距離の位置関係を計測する。指示具9を熔接する様に熔接する個所に沿って移動した位置の連続する距離の位置を記憶する。加工位置41Aから加工位置41Bまでの円周に沿って熔接する個所の距離の位置と、熔接する向きの距離の位置を同時に計測して記憶する。次に、加工物54Aの面取の加工する為に加工位置41Cから41Dの角に沿ってなぞる様に移動させる。ロボット19の作業具の面取の作業方向に合わせる様に面取り工具の治具に合わせた指示具9を使って、面取の作業の距離の位置と作業具の作業方向の距離を同時に計測して記憶する説明図。
熔接工具の治具に合わせた指示具9の先端の距離計測発光器4を、加工物54Aと加工物54Bの熔接作業をする加工位置41Aに接着して発光して、距離計測受光器3A、3B、3Cまでを飛行した最近の計測距離光1A、1B、1Cからなる距離の位置を計測して距離計測器2と加工位置41Aとの距離の位置関係を計測する。指示具9を熔接する加工位置41Aから加工位置41Bまでの円周を熔接する個所に沿ってなぞる様に移動させる。同時に、指示具9の手元に設けた距離計測発光器4Aの時間ずらせて放光した、距離計測受光器3A、3B、3Cまでを飛行した最近の計測距離1D、1E、1Fからなる距離の位置を計測して距離計測器2と指示具9の距離計測発光器4Aとの距離の位置関係を計測する。同様にして、距離計測発光器4B、4C、4Dから時間ずらせて放光して、距離計測受光器3A、3B、3Cまでを飛行した最近の計測距離を計測して距離計測器2と距離計測発光器4B、4C、4Dとの距離の位置関係を計測する。指示具9を熔接する様に熔接する個所に沿って移動した位置の連続する距離の位置を記憶する。加工位置41Aから加工位置41Bまでの円周を熔接する距離の位置と熔接する向きの距離の位置を同時に計測して記憶する説明図。
距離計測器2に組み込まれた、距離計測発光器4Eが発光して入射した光ファイバー5を通った距離計測光をロボット19の作業位置8に配置された先端の放光位置で放光して、距離計測受光器3A、3B、3Cまでを飛行した最近の計測距離7G、7H、7Iを計測した距離計測器2と作業位置8との距離の位置に、前記関連付けてロボット19の作業位置8を駆動する。図37、38に記載した、加工位置41Aから加工位置41Bまでの円周を熔接工具の治具に合わせた指示具9を使って熔接する個所に沿ってなぞる様に移動させて前記記憶した距離の位置を使って、距離計測器2から加工位置41Aから加工位置41Bまでの距離の位置を前記関連させたロボット19の作業位置8の熔接具を駆動して熔接する。同時に、指示具9の手元に設けた放光位置6A、6B、6C、6Dを使って計測した、距離計測器2から放光位置6A、6B、6C、6Dまでを前記記憶した距離の位置に前記関連させた作業位置8の熔接具の熔接する向きを合わせる様に熔接具を駆動する説明図。
前記記載した、加工物54Bの加工位置41Cから加工位置41Dまでを面取り工具の治具に合わせた指示具9を使って角に沿ってなぞる様に連続して移動させて計測して記憶した、距離計測器2からの加工位置41Cから加工位置41Dまでの連続する距離の位置に、前記関連させたロボット19の作業位置8の面取り工具を連続して駆動して面取り加工をする。同時に、指示具9Aの手元に設けた放光位置6A、6B、6C、6Dを使って計測した、距離計測器2から放光位置6A、6B、6C、6Dまでを前記記憶した距離の位置に、前記関連させた作業位置8の面取り工具の加工する向きを合わせる様に駆動する。ロボット19に加工位置41Cから加工位置41Dを、前記前もって計測して記憶した方向からロボット19の作業位置8の面取り工具を使って作業をさせる説明図。
ロボット19の作業位置8の熔接工具にテレビカメラ24を取りつけて、指示具9を使って熔接する個所に沿ってなぞる様に移動させて前記計測して前記記憶した前記距離の位置を使って、作業位置8を前記記憶に従って駆動して、放光位置6から撮影用の光を前記熔接する個所に放光して、テレビカメラ24を使って撮影する。テレビカメラ24の撮影したテレビカメラ画面26Aに映る熔接の位置の画像57と照射位置の画像44を使って、熔接する個所を前記記憶に従って駆動して確認する。前記確認して、作業位置8を前記記憶に従って駆動して熔接工具を使って熔接作業をする。前記熔接作業の後に、再度、作業位置8を前記記憶に従って駆動して、熔接工具に取りつけたテレビカメラ24の撮影したテレビカメラ画面26Bに映る熔接加工後の熔接位置の画像43と、熔接加工前のカメラ画面26Aに映る前記識別した位置の画像44を検査する説明図。
熔接操作をテレビカメラ24Aを使ってテレビ画面26A上の計測する位置の画像75Aの位置に関連付けた、数値制御レーザー距離計測機55の駆動機構を駆動して、距離計測用のレーザー光を計測する位置74に照射して、距離計測ユニット35から計測する位置74までの距離と方向を計測する。前記計測した距離と方向を使って、計測する位置の画像75Aの位置に関連付けた、数値制御のテレビカメラ59の駆動機構を駆動して、テレビ画面40A上に拡大した計測する位置の画像75Bを撮影する。前記撮影した計測する位置の画像75Bを識別する。前記識別して、前記計測した距離と方向に相当する距離の位置に関連付けた、距離計測用のロボット19Aの駆動機構を駆動して、距離計測用のロボット19Aの距離計測用の治具の指示具9Aを計測する位置74に接着させる。距離計測用のロボット19Aに取り付けたテレビカメラ24Bを使って、テレビ画面26B上に接近した計測する位置の画像75Cを撮影して熔接する位置を確認する。距離計測器2の距離計測発光器4Dを発光して入射した光ファイバー5Dを通った距離計測用の治具の指示具9Aの先端を計測する位置74に接着して放光した反射光を、距離計測器2の距離計測受光器3A、3B、3Cを使って受光して、距離計測器2から計測する位置74までの距離の位置を計測する。距離計測器2の距離計測発光器4A、4B、4Cを発光して入射した光ファイバー5A、5B、5Cを通った距離計測用の治具の指示具9Aの先端を計測する位置74に接着して治具の指示具9Aの手元から放光した反射光を、距離計測器2の距離計測受光器3A、3B、3Cを使って受光して、距離計測器2から治具の指示具9Aの手元の向きの距離の位置を計測する。インターネット網77を介して、前記関連付けたテレビ画面26Aの画像と、前記識別したテレビ画面40Aの画像と、前記確認したテレビ画面26Bと、数値制御レーザー距離計測機55の前記計測した距離計測ユニット35から計測する位置74までの距離と方向と、光ファイバーを使って前記計測した距離計測器2から計測する位置74までの距離の位置と、光ファイバーを使って前記計測した距離計測器2から治具の指示具9Aの手元の向きの距離の位置を記憶する説明図。
インターネット網77を介して、説明図40に記載した前記記憶した、前記関連付けたテレビ画面26Aの画像と、前記識別したテレビ画面40Aの画像と、前記確認したテレビ画面26Bと、数値制御レーザー距離計測機55の前記計測した距離計測ユニット35から計測する位置74までの距離と方向と、光ファイバーを使って前記計測した距離計測器2から計測する位置74までの距離の位置と、光ファイバーを使って前記計測した距離計測器2から治具の指示具9Aの手元の向きの距離の位置を確認する。距離計測器2から前記計測する位置74までの前距離の位置に前記関連づけた駆動数値を使って、熔接用のロボット19Bの駆動機構の熔接機78を熔接位置80に駆動させる。熔接機78に取り付けたテレビカメラ24C使って、熔接位置80を撮影したテレビ画面26Cの熔接位置の画像81Cを前記記憶画面と比較参照する。前記比較参照して、前記記憶した距離の位置に前記関連づけた駆動数値を使って、熔接用のロボット19Bを駆動して、熔接位置80の熔接加工をする。熔接加工の後に、再度熔接用のロボット19Bを前記記憶した距離の位置を使って駆動して、熔接機78に取り付けたテレビカメラ24C使って、熔接位置80を撮影したテレビ画面26Cを検収する説明図。
地表22の概知の位置15に指示具9Aを接着して概知の位置15と距離計測器2との距離の位置関係を取得して、未知の位置16に指示具9Bを接着して未知の位置16と距離計測器2との距離の位置関係を取得することで、概知の位置15から未知の位置16までの距離の位置関係を演算する説明図。
地表22の概知の位置15Aに指示具9Aを接着して概知の位置15Aと距離計測器2との距離の位置関係の維持をして、指示具9Cを未知の位置16Cの形状に合わせて接着して未知の位置16Cの形状と距離計測器2との距離の位置関係を取得する。未知の位置16Cの形状を概知の位置15Aから計測する説明図。
距離計測器2Aの距離計測発光器4の発光した距離計測光を入射した光ファイバー5Aを通って、上空を飛行するドローンの14に繋がる光ファイバー5Aの先端の放光位置6から放光した距離計測光を、距離計測器2Aの距離計測受光器3A、3B、3Ⅽを使って受光して計測した計測距離光1A、1B、1Ⅽからなる飛行するドローンの14の距離の位置を計測する。同時に、距離計測発光器4の発光した距離計測光を入射した光ファイバー5Bを通って、距離計測器2Bの距離計測受光器3Mを使って受光して、距離計測発光器4の発光した時間を共有する。距離計測器2Bの距離計測受光器3D、3E、3Fを使って受光して計測した計測距離光1D、1E、1Fからなる距離の位置を計測する。距離計測器2Aから飛行するドローン14までの計測距離光1A、1B、1Ⅽからなる距離の位置と距離計測器2Bから飛行するドローン14までの計測距離光1D、1E、1Fからなる距離の位置を介して、距離計測器2Aから距離計測器2Bまでの計測距離7を演算する説明図。
距離計測器2Aの距離計測発光器4の発光した距離計測光を入射した光ファイバー5Aを通って、巻取機88に繋がれて上空に飛行して留まるドローンの14に繋がる光ファイバー5Aの先端の放光位置6から安定して放光した距離計測光を、距離計測器2Aの距離計測受光器3A、3B、3Ⅽを使って受光して計測した計測距離光1A、1B、1Ⅽからなる距離の位置を安定して計測する。同時に、距離計測発光器4の発光した距離計測光を入射した光ファイバー5Bを通って、距離計測器2Bの距離計測受光器3Mを使って受光して、距離計測発光器4の発光した時間を共有する。距離計測器2Bの距離計測受光器3D、3E、3Fを使って受光して計測した計測距離光1D、1E、4Fからなる距離の位置を計測する。距離計測器2Aから巻取機88に繋がれて上空に飛行して留まるドローン14までの計測距離光1A、1B、1Ⅽからなる距離の位置と距離計測器2Bから飛行するドローン14までの計測距離光1D、1Eからなる距離の位置を介して、距離計測器2Aから距離計測器2Bまでの計測距離7を演算する説明図。
距離計測器2Aの距離計測発光器4の発光した距離計測光を入射した光ファイバー5Aを通って、上空を飛行するドローンの14に繋がる光ファイバー5Aの先端の放光位置6Aから放光した距離計測光を、距離計測器2Aの距離計測受光器3A、3B、3Ⅽを使って受光して計測した計測距離光1A、1B、1Ⅽからなる距離の位置を計測する。同時に、距離計測発光器4の発光した距離計測光を入射した光ファイバー5Bを通って、指示具9の放光位置6Bから上空に放光した計測距離光を、上空を飛行するドローンの14の前記発光した時間を共有する距離計測受光器3D、3E、3Fを使って受光して、計測した計測距離光1D、1E、1Fからなる距離の位置を計測する。距離計測器2Aから飛行するドローン14までの計測距離光1A、1B、1Ⅽからなる距離の位置と飛行するドローン14から指示具9までの計測距離光1D、1E、1Fからなる距離の位置を介して、距離計測器2Aから指示具9までの計測距離7を演算する説明図。
地上の概知の位置15の距離計測発光器4Aの発光した距離計測光Aを入射した光ファイバー5Aを通って、上空を飛行するドローンの14に繋がる光ファイバー5Aの先端の放光位置6Aから放光した距離計測光Aを、概知の位置15からテレビカメラ24Bの撮影したテレビ画面26B上に映る上空を飛行するドローンの画像85Aの位置に、上空を飛行するドローンの14からの距離計測光を受光する様に関連付けた、駆動機構84に取り付けた距離計測受光器3A、3B、3Ⅽを使って受光して計測した計測距離光1A、1B、1Ⅽからなる距離の位置を計測する。同時に、ドローンの14から放光した距離計測光を、未知の位置16の距離計測発光器4Bの発光した距離計測光Bを入射した光ファイバー5Bを通って、上空を飛行するドローンの14に繋がる光ファイバー5Bの先端の放光位置6Bから放光した距離計測光Bを、数値制御のテレビカメラ59のテレビ画面40Bの中央の位置に上空を飛行するドローンの画像85Bを撮影する、数値制御のテレビカメラ59に取り付けた距離計測受光器3D、3E、3Fを使って受光して、計測した計測距離光1D、1E、1Fからなる距離の位置を計測する。概知の位置15から飛行するドローン14までの計測距離光1A、1B、1Ⅽからなる距離の位置と未知の位置16から飛行するドローン14までの計測距離光1D、1E、1Fからなる距離の位置を使って、概知の位置15から未知の位置16までの計測距離7を演算する説明図。
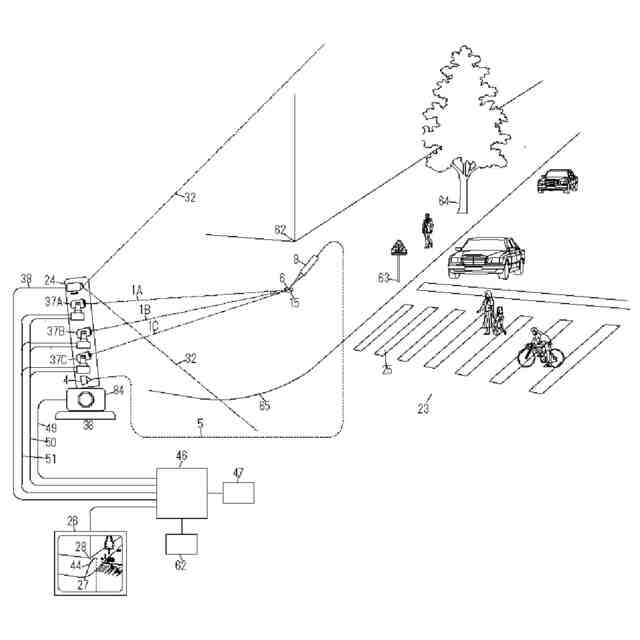
雲台33に組み込まれた距離計測器2を使って、走行路23の交差点付近の概知の位置15に指示具9を接着して、概知の位置15と距離計測器2との距離の位置関係を取得する。雲台33に取り付けたスマートフォン34に組み込まれたテレビカメラを使って、計測する交差点の概知の位置15を撮影するする説明図。
前記概知の位置15と距離計測器2との距離の位置関係を取得して、道路の交差点の右角17の位置に指示具9を接着して、道路の交差点の右角17と距離計測器2との距離の位置関係を取得する。交差点の右角17を概知の位置15に関係付ける。又は、雲台33に取り付けたスマートフォン34に組み込まれたGPS測位機能を使って測位した測位値と前記計測した距離の位置を使って、交差点の右角17の位置のGPS測位値を演算して、スマートフォン34に組み込まれたテレビカメラを使って撮影する説明図。
前記概知の位置15と距離計測器2との位置関係を取得して、道路の交差点の左角18の位置に指示具9を接着して、道路の交差点の左角18と距離計測器2との距離の位置関係を取得する。道路の交差点の左角18を概知の位置15に関係付ける。更に、交差点の右角17と交差点の左角18の道路幅を演算する。雲台33に取り付けたスマートフォンを使って、距離計測する交差点の概知の位置15と右角17と左角18を撮影するする説明図。
雲台33に組み込まれた距離計測器2を使って、走行路23の交差点付近の概知の位置15に指示具9を接着して、概知の位置15の絶対方位値と距離計測器2の距離の位置関係を取得する。雲台33に取り付けたテレビカメラ24の撮影するテレビ画面上に、概知の位置の画像27と指示具の画像28の距離計測用の光を映す説明図。
雲台33に取り付けた距離計測器2を使って、概知の位置15の絶対方位値と距離計測器2の距離の位置関係を取得する。走行路23の交差点の横断歩道25と交差点付近の曲がり角の縁石65と交差点付近の街角62と交差点付近の街路樹63の位置に指示具9を接着して、横断歩道25と縁石65と街角62と街路樹63から距離計測器2までとの距離の位置関係を取得する。概知の位置15の絶対方位値を使って、横断歩道25と曲がり角の縁石65と街角62と街路樹63の絶対方位値を演算して取得する。 雲台33に取り付けたテレビカメラ24の撮影するテレビ画面上に映る、絶対方位値の画像27と横断歩道の画像29と曲がり角の縁石の画像67と街角の画像66と街路樹の画像68を、画像認識の方法を使って識別する。前記識別した画像に関連付けた絶対方位値の数値を付けて、コンピューター上の既存の地図上に及び既存の衛星画像に張付けて記憶する説明図。
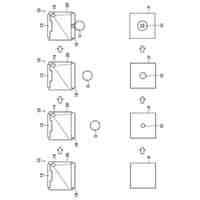
追尾システム31に組み込まれた距離計測器2を使って、走行路23の交差点付近の概知の位置15に指示具9を接着して、概知の位置15と距離計測器2との距離の位置関係を取得する。概知の位置15に指示具9を接着して放光する光を、テレヒカメラ24を使って指示具9の接着した概知の位置15に照射位置の画像44を撮影する。テレヒ画面26上に映る概知の位置の画像27の照射位置の画像44Aの位置に前記関連付けた駆動数値を使って、数値制御のテレビカメラ59を駆動して、数値制御のテレビ画面40Aの中央の位置に概知の位置の画像27に照射位置の画像44A前記放光の光を撮影する。同様にして前記計測して、数値制御のテレビ画面40B、40C、40D、40Eの中央の位置に、街角の画像62、道路標識の画像63、街路樹の画像64、縁石の画像65に照射位置の画像44B、44C、44D、44Eを撮影する。数値制御のテレビ画面40A、40B、40C、40D、40Eに拡大して映る、概知の位置の画像27、街角の画像62、道路標識の画像63、街路樹の画像64、縁石の画像65の画像を識別して、前記計測した絶対方位値の数値を付して、テレヒ画面26上に映る位置に張り付けて記憶する。前記張り付けて記憶したテレヒ画面26を使って、既存の地図をデジタル地図の絶対方位表示の地図にする説明図。
追尾システム31に組み込まれた、距離計測器2を使って、走行路23の交差点付近の概知の位置15に指示具9を接着して、概知の位置15と距離計測器2との距離の位置関係を取得する。数値制御のテレヒカメラ59の画角を広めてテレヒ画面40上の中央の位置に概知の位置の画像27に照射位置の画像44を撮影する。テレヒ画面40上に映る画像を画像認識の方法を使って識別する。前記識別した概知の位置の画像27を数値制御のテレヒカメラ59の画角を狭めてテレヒ画面40A上の中央の位置に概知の位置の画像27に照射位置の画像44Aを撮影する。同様にして指示具9を接着して、数値制御のテレビ画面40B、40C、40D、40Eの中央の位置に街角の画像66、道路標識の画像67、街路樹の画像68、縁石の画像69に照射位置の画像44B、44C、44D、44Eを撮影する。数値制御のテレビ画面40A、40B、40C、40D、40Eに拡大して、前記識別した照射位置の画像44B、44C、44D、44Eが映る概知の位置の画像27、街角の画像62、道路標識の画像63、街路樹の画像64、縁石の画像65に、前記計測した絶対方位値の数値を付して、テレヒ画面40上に映る画面の位置に張り付けて記憶する。前記張り付けて記憶したテレヒ画面40A、40B、40C、40D、40Eの画像を使って、既存の地図をデジタル地図の絶対方位表示の地図にする説明図。
雲台33に組み込まれた距離計測発光器4の発光する距離計測光の入射させた光ファイバー5を通って、先端の指示具9を概知の位置15に接着した放光位置6で放光されたて3次元空間を飛行する計測距離光1A、1B、1Cを、雲台33に組み込まれたテレビカメラ24の撮影するテレビ画面26に映る距離計測光の放射位置の画像44の位置に関連付けた、雲台33に組み込まれた異なる位置の数値制御の駆動機構の距離計測受光器37A、37B、37Cを使って受光する範囲を狭めた受光する。異なる位置の数値制御の距離計測受光器37A、37B、37Cが計測した計測距離光1A、1B、1Cからなる、雲台33から概知の位置15の距離の位置を演算して計測する説明図。
雲台33に組み込まれた距離計測発光器4の発光する距離計測光の入射させた光ファイバー5を通って、先端の指示具9を概知の位置15に接着した放光位置6で放光する、3次元空間を飛行する計測距離光1A、1B、1Cを雲台33に組み込まれた数値制御のテレビカメラ59A、59B、59Cを使って撮影する。前記撮影したテレビ画面40A、40B、40C上に映る概知の位置の画像27A、27B、27Cの位置が、テレビ画面40A、40B、40C上の中央の位置に映る様に撮影する。数値制御のテレビカメラ59A、59B、59Cに、テレビ画面40A、40B、40Cの前記中央の方向を計測する様に取り付けた距離計測受光器3A、3B、3Cを使って、テレビ画面40A、40B、40C上の中央の位置に映る概知の位置15に指示具9を接着して放光した計測距離光1A、1B、1Cを計測する。数値制御のテレビカメラ59A、59B、59Cの撮影する概知の位置15に向けて、受光する範囲を狭めて計測した距離計測受光器3A、3B、3Cを使って、計測距離光1A、1B、1Cを計測する説明図。
テレビ画面26を及び数値制御のテレビ画面40、40A、40B、40C、40D、40Eに映る、概知の位置の画像27、街角の画像62、道路標識の画像63、街路樹の画像64、縁石の画像65に照射位置の画像44、44A、44B、44C、44D、44Eを、インターネット網を介して記憶する。前記記憶を参照して、インターネット網にある衛星地図画像等に前記画像を配布する。前記画像を使って、既存の地図をデジタル地図の絶対方位表示の地図にする。
走行路23を走行する自動車98の運転者が装着した視線テレビカメラを使って撮影したテレビ画面から注視した画像を記憶する。前記記憶した注視した画像を、走行路23をテレビカメラ24の撮影するテレビ画面26上の画像に合わせる様に展開して表示する。テレビ画面26上の展開した注視した画像の位置に関連付けた、数値制御のテレビカメラ59の駆動数値を使って撮影した前記注視した画像の映る数値制御のテレビ画面40A、40B、40C、40D、40Eを見ながら、前記注視した画像の映る被写体に、距離計測器2の指示具9を接着して、距離計測器2から前記注視した画像に映る被写体との距離の位置を計測する説明図。
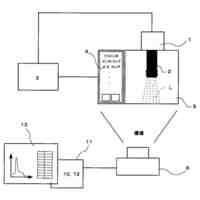
距離計測発光器4を計測物10の計測位置11に接着させて発光した飛行距離計測光1を、距離計測器2の距離計測受光器3Bを使って受光する。同時に前記発光した距離計測光を入射させた光ファイバー5を通して距離計測器2の距離計測受光器3Aを使って受光して光ファイバー5を通った概知の時間を計測して、空間を飛行した距離計測光1を算出する説明図。
指示具9に組み込まれた距離計測発光器4の発光した距離計測光を、計測物10の計測位置11に照射した反射光が、空間を飛行した飛行距離計測光1を、距離計測器2の距離計測受光器3Bを使って受光する。同時に計測位置11に照射した前記反射光を入射させた光ファイバー5を通して距離計測器2の距離計測受光器3Aを使って受光して、前記計測した光ファイバー5を通った概知の時間から、空間を飛行した距離計測光1を算出する説明図。
指示具9に組み込まれた距離計測発光器4を、計測物の計測位置11に接着させて発光して照射した距離計測光の反射光が、空間を飛行した距離計測光1A、1B、1Ⅽを、距離計測器2の距離計測受光器3A、3B、3Ⅽを使って受光する。同時に計測位置11に照射した前記を入射させた光ファイバー5を通して距離計測器2の距離計測受光器3Dを使って受光する。前記ファイバー5を通して受光した概知の時間から、距離計測発光器4の発光した時間を逆算し、前記逆算した時間から、距離計測受光器3A、3B、3Ⅽの受光した時間を使って、計測位置11から距離計測受光器3A、3B、3Ⅽまでの距離を演算し、距離計測発光器4の位置から計測位置11の距離の位置を算出する説明図。
指示具9に組み込まれた距離計測発光器4の発光した距離計測光を、計測物10の計測位置11に照射した反射光の、空間を飛行した飛行距離計測光1A、1B、1Ⅽを、距離計測器2の距離計測受光器3A、3B、3Ⅽを使って受光する。同時に計測位置11に照射した反射光を入射させた光ファイバー5を通して距離計測器2の距離計測受光器3Dを使って受光する。同時に指示具9に組み込まれた距離計測受光器3Eを使って受光する。概知の光ファイバー5を通った概知の時間と、距離計測受光器3Eを使って受光した時間から、空間を飛行した計測距離光7A、B7、7Ⅽの時間を算出し、距離計測発光器4の位置から計測位置11の距離の位置を算出する説明図。
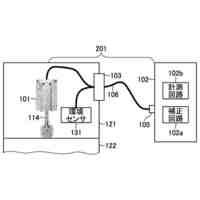
指示具9に組み込まれた距離計測発光器4の発光させた距離計測光の放光位置6を、距離計測器2の距離計測受光器3A、3B、3Ⅽに接着させて、放光位置6から光ファイバー5を通った概知の時間を計測して補正する説明図。
距離計測発光器ユニット35組み込まれた距離計測器2A、2B、2Ⅽの距離計測発光器4A、4B、4Ⅽの時間をずらせて発光した距離計測光を入射させたマルチの光ファイバー5A、5B、5Ⅽを通って、同じ放光位置6で前記時間をずらせて放光した距離計測光1A、1B、1Ⅽを、距離計測器2A、2B、2Ⅽの位置の距離計測受光器3A、3B、3Ⅽを使って時間をずらせて受光する説明図。
指示具9の先端の距離計測発光器4A、4B、4Cの時間をずらせて発光して空間に飛行した距離計測光1A、1B、1Cを、距離計測発光器ユニット35に組み込まれた距離計測発光器3A、3B、3Ⅽを使って受光する。距離計測発光器4A、4B、4Cの位置で前記時間をずらせて発光して入射した各光ファイバー5A、5B、5Ⅽを通って距離計測発光器3A、3B、3Ⅽの位置の距離計測受光器3D、3E、3Fを使って前記時間をずらせて受光してする。前記距離計測発光器4A、4B、4Cの前記時間をずらせて発光した時間と離計測受光器3D、3E、3Fの前記時間をずらせて受光した各時間との各時間差から、ファイバー5A、5B、5Ⅽを通った概知の各時間を減じた各時間を使って、距離計測光1A、1A、1Cの前記飛行した時間を算出する。前記時間をずらせて発光した時間と距離計測光1A、1A、1Cを距離計測発光器3D、3E、3Fの前記時間をずらせて受光した時間を使って、距離計測発光器ユニット35から計測位置11までの距離を正確に計測する説明図。
距離計測発光器ユニット35組み込まれた距離計測器2A、2B、2Ⅽの距離計測発光器4A、4B、4Ⅽの時間をずらせて発光した距離計測光を入射させた光ファイバー5A、5B、5Ⅽを通った距離計測光を、光混合器70を使って光ファイバー5に合光させて、指示具9の先端の放光位置6から放光させた距離計測光1A、1B、1Ⅽを、距離計測器2A、2B、2Ⅽの距離計測受光器3A、3B、3Ⅽを使って時間をずらせて受光する説明図。
指示具9の先端の発光位置4から放光させた距離計測光1A、1B、1Ⅽ、1D、1Eを距離計測器2A、2B、2Ⅽ、2D、2Eの各距離計測発光器3A、3B、3Ⅽ、3D、3Eを使って受光する。発光位置4のから放光させた距離計測光を、発光した時間が共有する多方向からの距離計測光1A、1B、1Ⅽ、1D、1Eを離計測発光器距離計測光2A、2B、2Ⅽ、2D、2Eの位置で受光する説明図。
距離計測発光器ユニット35に組み込まれた距離計測器2A、2B、2Ⅽ、2Dの時間をずらせて発光して入射させた光ファイバー5A、5B、5Ⅽ、5Dを通って配置した距離計測光を、ロボットの異なる駆動機構の放光位置6A、6B、6Ⅽ、6Dから時間をずらせて放光する。前記放光した距離計測光7A、7B、7Ⅽ、7D、7E、7F、7Gを距離計測器2A、2B、2Ⅽの各距離計測発光器4A、4B、4Ⅽ、4Dの位置の距離計測受光器3A、4B、4Ⅽ、4Dを使って時間をずらせて受光して、ロボットの異なる駆動機構の駆動位置の計測距離7A、7B、7Ⅽと7D、7E、7Gと7Fからなる距離の位置を計測する説明図。
距離計測発光器ユニット35に組み込まれた距離計測発光器4A、4B、4Ⅽ、4Dの時間をずらせて発光して入射した光ファイバー5A、5B、5Ⅽ、5Dを通って配置した、スポーツ選手72の運動する異なる計測位置11A、11B、11Ⅽ、11Dから放光した距離計測光を、距離計測器2A、2B、2Ⅽ、2Dの距離計測受光器3A、4B、4Ⅽを使って前記時間をずらせて受光する。スポーツ選手の運動する異なる計測位置11A、11B、11Ⅽ、11Dから前記時間をずらせて放光して計測する空間を飛行する計測距離7A、7B、7Ⅽと7D、7E、7Fの各運動する距離の位置を連続して高速に計測する説明図。
【 実施例】
【0010】
機器と用語の説明
テレビカメラとレーザー距離計測器は1般の市販品である。
数値制御のテレビカメラと数値制御のレーザー距離計測機と数値制御の距離計測受光機と受光器を取り付けた駆動機構とロボットは、撮影する方向と計測する方向と距離計測光を受光する方向とロボットの作業位置の駆動は、数値制御の駆動機構を駆動数値で駆動する。
距離計測する速度は、1秒間に30回から1000回程度の計測速度を想定している。
マルチ光ファイバーは幾本かの光ファイバーを、束めて配置して、各先端の位置で放光又は入射又は受光する。
識別は、テレビカメラの撮影したテレビ画面を使って、テレビ画面から検出した画像を含む、学習機能の画像認識等の方法を使って必要に応じて特定した画像。
実施例 図1の距離計測器2に組み込まれた距離計測発光器4の発光する距離計測光を光ファイバー5に入射させてロボット19の駆動機構内を通って、作業位置8に配置された光ファイバー5の先端の放光位置6で空間に放光させて散光させる。
前記空間に放光され距離計測光が空間の最近の計測距離7を飛行して、距離計測器2に組み込まれた距離計測受光器3Aを使って受光する。
距離計測発光器4の発光した時間と距離計測受光器3Aの受光した時間の差から、光ファイバー5を通った時間を減じた時間を使って、距離計測器2から作業位置8までの計測距離7を演算する。
又は、前記放光した時間から前記受光した時間までの時間を使って、距離計測器2から作業位置8までの計測距離7を演算する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
通電検査装置
3日前
個人
光フアィバー距離計測器
5日前
個人
光フアィバー距離計測器
5日前
個人
バッテリ用交流電流供給装置
5日前
日本FC企画株式会社
特性試験装置
23日前
株式会社ハシマ
検針機
2日前
株式会社オービット
検査装置
12日前
株式会社ミツトヨ
自動測定装置
24日前
有限会社フィット
外観検査装置
16日前
本多電子株式会社
水中探知装置
24日前
株式会社ミツトヨ
自動測定装置
24日前
富士電機株式会社
回転機
13日前
株式会社東芝
センサ
12日前
株式会社SUBARU
車載装置
19日前
株式会社東芝
試験装置
19日前
産電工業株式会社
水道検針システム
23日前
靜甲株式会社
液切れ性評価システム
20日前
アズビル株式会社
真空計測システム
13日前
アズビル株式会社
真空計測システム
13日前
DIC株式会社
測定装置
4日前
シスメックス株式会社
分析装置
9日前
富士電機株式会社
放射線検出器
4日前
株式会社タムラ製作所
電流検出器
9日前
富士フイルム株式会社
圧力センサ
23日前
富士フイルム株式会社
圧力センサ
23日前
オムロン株式会社
電気装置
20日前
株式会社アドバンテスト
試験装置
11日前
個人
ネブライザー
11日前
アズビル株式会社
環境負荷判定システム
24日前
ダイハツ工業株式会社
凹部の深さ測定方法
2日前
株式会社国際電気
調整装置
16日前
矢崎総業株式会社
電流センサ
3日前
スタンレー電気株式会社
車両前方視認装置
2日前
スタンレー電気株式会社
車両前方視認装置
2日前
日鉄テックスエンジ株式会社
情報処理装置
9日前
本田技研工業株式会社
物体検出装置
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ