TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043163
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023150510
出願日
2023-09-15
発明の名称
測量方法及び測量システム
出願人
愛知製鋼株式会社
代理人
個人
主分類
G01C
7/04 20060101AFI20250321BHJP(測定;試験)
要約
【課題】磁気マーカの敷設位置を効率良く測量するための方法及びシステムを提供すること。
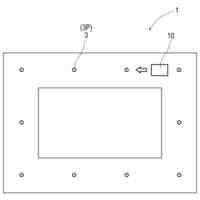
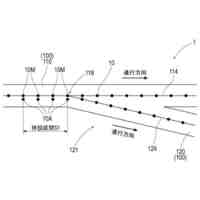
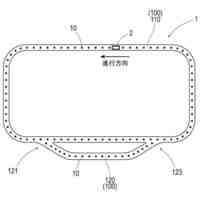
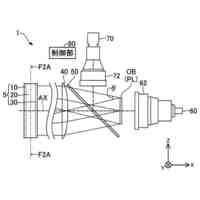
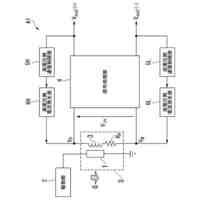
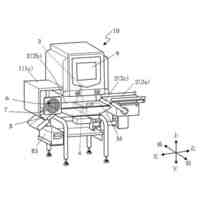
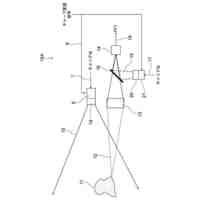
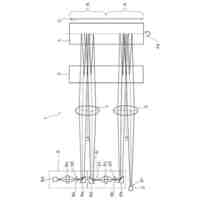
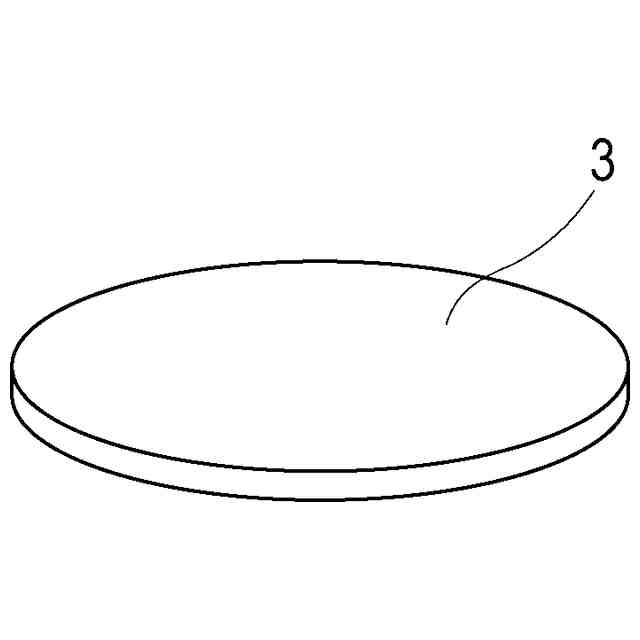
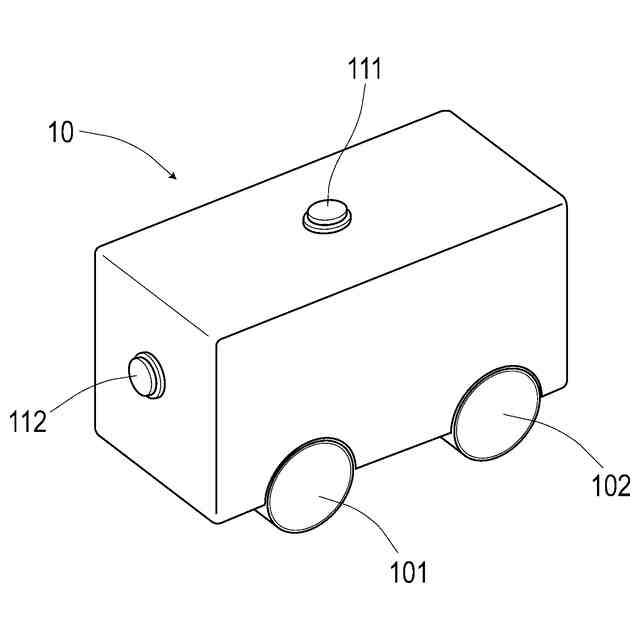
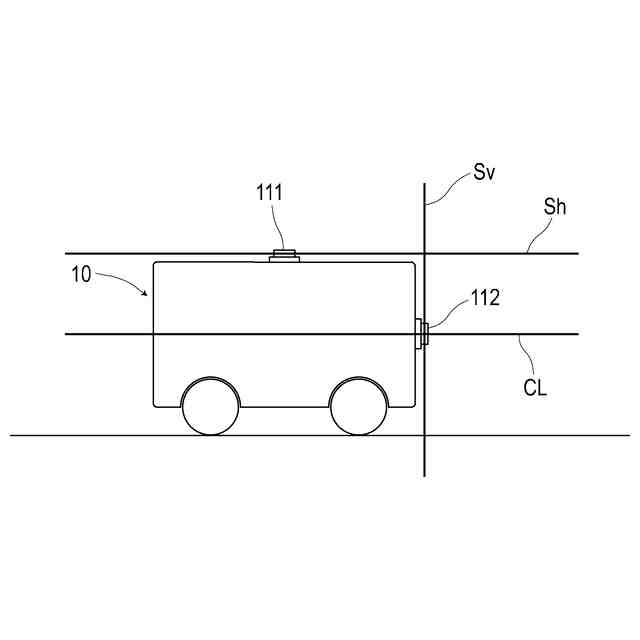
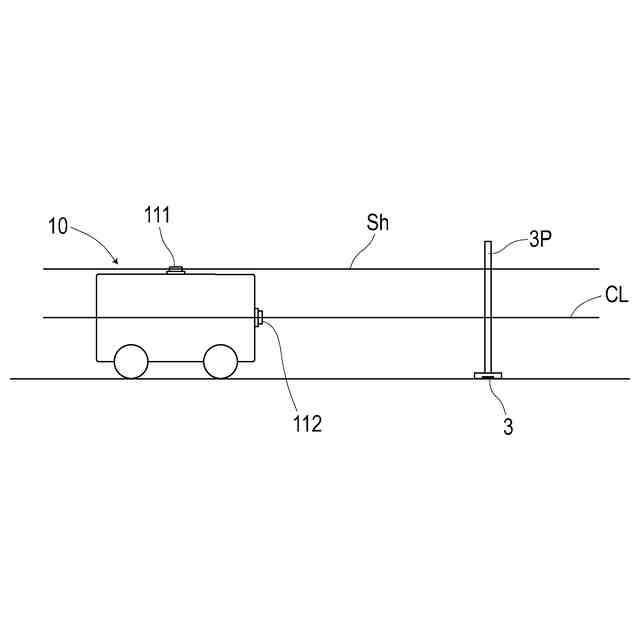
【解決手段】磁気マーカ3の敷設位置を移動しながら測量するための測量システム1は、移動体10に搭載された距離センサを用いて走路環境の3次元情報を取得して移動体10の位置及び方位を推定する推定処理回路と、移動体10の位置及び方位を基準として磁気マーカ3の敷設位置を特定する測量処理回路と、を含み、磁気マーカ3は、距離センサが検出可能な目印が少なくとも測量の際に付設される磁気マーカであり、測量システム1においては、距離センサによって磁気マーカ3が検出されたとき、磁気マーカ3が属する走路環境の3次元情報を取得して移動体10の位置及び方位が推定され、移動体の位置及び方位を基準として磁気マーカ3の敷設位置が特定される。
【選択図】図1
特許請求の範囲
【請求項1】
車両が備える磁気センサを用いて磁気的に検出可能なように走路に敷設された磁気マーカの敷設位置を、移動体が移動しながら測量するための方法であって、
移動体に搭載された距離センサを用いて走路環境の3次元情報を取得して前記移動体の位置及び方位を推定する推定処理と、
前記移動体の位置及び方位を基準として磁気マーカの敷設位置を特定する測量処理と、を含み、
前記磁気マーカは、前記距離センサが検出可能なように構成された磁気マーカであるか、あるいは前記距離センサが検出可能な目印が少なくとも測量の際に付設される磁気マーカであり、
前記距離センサによって前記磁気マーカが検出されたとき、当該磁気マーカが属する走路環境の3次元情報を取得して前記移動体の位置及び方位が推定されると共に、当該移動体の位置及び方位を基準として当該磁気マーカの敷設位置が特定される、測量方法。
続きを表示(約 1,500 文字)
【請求項2】
請求項1において、前記距離センサは、対象物に対して電磁波を照射したときの反射時間に対応する距離を、当該対象物までの距離として計測するセンサであって、
前記磁気マーカは、前記距離センサから照射された電磁波を反射するように走路の表面に配置される磁気マーカであるか、あるいは前記距離センサから照射された電磁波を反射するように走路の表面に設けられた部材が前記目印として付設された磁気マーカである、測量方法。
【請求項3】
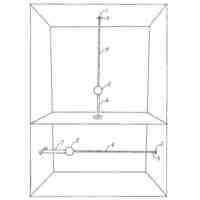
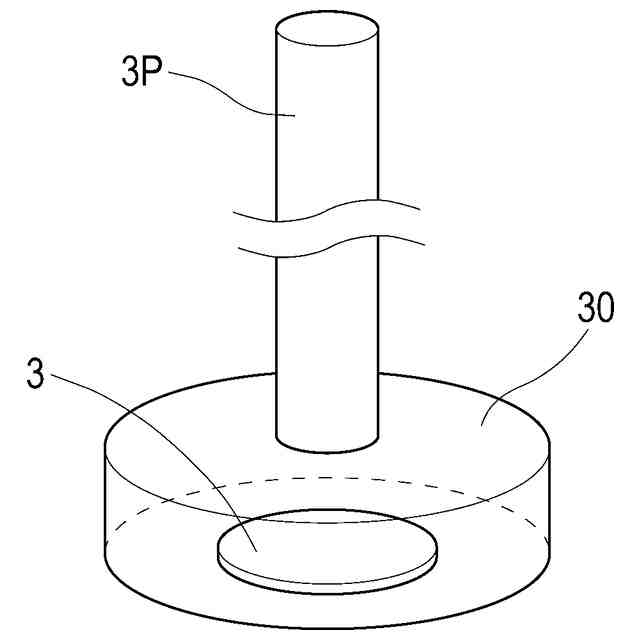
請求項2において、前記距離センサは、水平面に沿う計測面を有する2次元測域センサであり、前記目印は、測量の際に磁気マーカの敷設位置に立設される棒状のポールである、測量方法。
【請求項4】
請求項1において、前記距離センサは、撮影エリア内の対象物までの距離を計測可能な1台または2台以上の複数台の撮像カメラであって、
前記磁気マーカは、前記1台または2台以上の複数台の撮像カメラによって撮影可能なように走路の表面に配置された磁気マーカであるか、あるいは前記1台または2台以上の複数台の撮像カメラで撮影可能なように走路の表面に設けられた部材が前記目印として付設された磁気マーカである、測量方法。
【請求項5】
車両が備える磁気センサを用いて磁気的に検出可能なように走路に敷設された磁気マーカの敷設位置を、移動体が移動しながら測量するためのシステムであって、
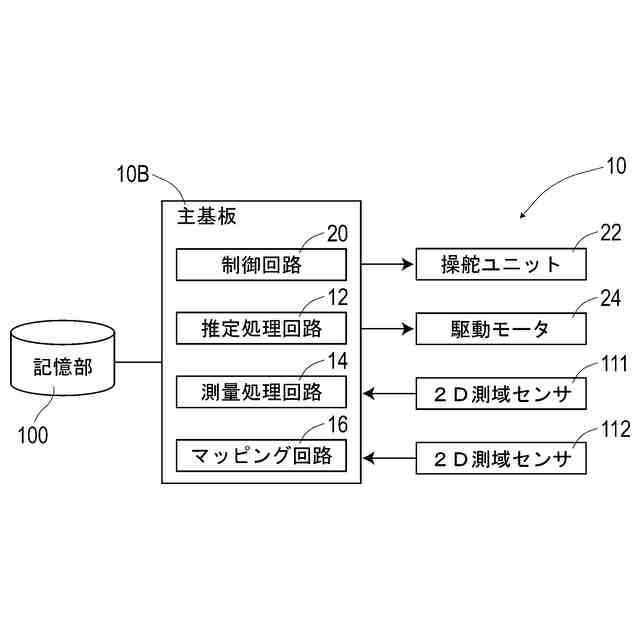
移動体に搭載された距離センサを用いて走路環境の3次元情報を取得して前記移動体の位置及び方位を推定する推定処理回路と、
前記移動体の位置及び方位を基準として磁気マーカの敷設位置を特定する測量処理回路と、を含み、
前記磁気マーカは、前記距離センサが検出可能なように構成された磁気マーカであるか、あるいは前記距離センサが検出可能な目印が少なくとも測量の際に付設される磁気マーカであり、
前記距離センサによって前記磁気マーカが検出されたとき、当該磁気マーカが属する走路環境の3次元情報を取得した前記推定処理回路により前記移動体の位置及び方位が推定され、当該移動体の位置及び方位を基準として前記推定処理回路により当該磁気マーカの敷設位置が特定されるように構成されている、測量システム。
【請求項6】
請求項5において、前記距離センサは、対象物に対して電磁波を照射したときの反射時間に対応する距離を、当該対象物までの距離として計測するセンサであって、
前記磁気マーカは、前記距離センサから照射された電磁波を反射するように走路の表面に配置される磁気マーカであるか、あるいは前記距離センサから照射された電磁波を反射するように走路の表面に設けられた部材が前記目印として付設された磁気マーカである、測量システム。
【請求項7】
請求項6において、前記距離センサは、水平面に沿う計測面を有する2次元測域センサであり、前記目印は、測量の際に磁気マーカの敷設位置に立設される棒状のポールである、測量システム。
【請求項8】
請求項5において、前記距離センサは、撮影エリア内の対象物までの距離を計測可能な1台または2台以上の複数台の撮像カメラであって、
前記磁気マーカは、前記1台または2台以上の複数台の撮像カメラによって撮影可能なように走路の表面に配置された磁気マーカであるか、あるいは前記1台または2台以上の複数台の撮像カメラで撮影可能なように走路の表面に設けられた部材が前記目印として付設された磁気マーカである、測量システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両が走行中に検出可能なように敷設された磁気マーカの位置を測量するための方法及びシステムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、車両によって検出可能に走路に敷設される磁気マーカが知られている(例えば、特許文献1参照。)。磁気マーカは、例えば、車両に搭載された磁気センサを利用して検出可能である。例えば自動車の走路をなす車線に沿って敷設された磁気マーカを利用すれば、自動操舵制御や車線逸脱警報などの各種の運転支援のほか、自動運転を実現できる。
【0003】
例えば工場内を移動する搬送車両の走路に磁気マーカを敷設すれば、走路に沿って搬送車両を自動走行させるシステムを構築できる。このようなシステムによれば、工場内での資材の搬送を自動化して省人化を図ることができ、生産コストを抑制できる(例えば特許文献2参照。)。
【先行技術文献】
【特許文献】
【0004】
特開2023-17383号公報
特開2023-50720号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、前記従来の磁気マーカを利用するシステムでは、次のような問題がある。すなわち、道路を走行する自動車や工場内を移動する搬送車両を精度高く制御するためには、磁気マーカの敷設位置が精度高く把握されていることが必要である一方、磁気マーカを位置精度高く敷設しようとすると施工コストの上昇を招くおそれがある。
【0006】
本発明は、前記従来の問題点に鑑みてなされたものであり、磁気マーカの敷設位置を効率良く測量するための方法及びシステムを提供しようとするものである。
【課題を解決するための手段】
【0007】
本発明の一態様は、車両が備える磁気センサを用いて磁気的に検出可能なように走路に敷設された磁気マーカの敷設位置を、移動体が移動しながら測量するための方法であって、
移動体に搭載された距離センサを用いて走路環境の3次元情報を取得して前記移動体の位置及び方位を推定する推定処理と、
前記移動体の位置及び方位を基準として磁気マーカの敷設位置を特定する測量処理と、を含み、
前記磁気マーカは、前記距離センサが検出可能なように構成された磁気マーカであるか、あるいは前記距離センサが検出可能な目印が少なくとも測量の際に付設される磁気マーカであり、
前記距離センサによって前記磁気マーカが検出されたとき、当該磁気マーカが属する走路環境の3次元情報を取得して前記移動体の位置及び方位が推定されると共に、当該移動体の位置及び方位を基準として当該磁気マーカの敷設位置が特定される、測量方法にある。
【0008】
本発明の一態様は、車両が備える磁気センサを用いて磁気的に検出可能なように走路に敷設された磁気マーカの敷設位置を、移動体が移動しながら測量するためのシステムであって、
移動体に搭載された距離センサを用いて走路環境の3次元情報を取得して前記移動体の位置及び方位を推定する推定処理回路と、
前記移動体の位置及び方位を基準として磁気マーカの敷設位置を特定する測量処理回路と、を含み、
前記磁気マーカは、前記距離センサが検出可能なように構成された磁気マーカであるか、あるいは前記距離センサが検出可能な目印が少なくとも測量の際に付設される磁気マーカであり、
前記距離センサによって前記磁気マーカが検出されたとき、当該磁気マーカが属する走路環境の3次元情報を取得した前記推定処理回路により前記移動体の位置及び方位が推定され、当該移動体の位置及び方位を基準として前記推定処理回路により当該磁気マーカの敷設位置が特定されるように構成されている、測量システムにある。
【発明の効果】
【0009】
本発明の測量システム及び測量システムにおける磁気マーカは、距離センサが検出可能なように構成された磁気マーカであるか、あるいは距離センサが検出可能な目印が少なくとも測量の際に付設される磁気マーカである。本発明では、距離センサによって磁気マーカが検出されたとき、磁気マーカが属する走路環境の3次元情報を取得して移動体の位置及び方位が推定され、当該移動体の位置及び方位を基準として磁気マーカの敷設位置が特定される。
【0010】
本発明の測量システム及び測量方法は、移動体が移動しながら磁気マーカの敷設位置を測量して特定するシステムあるいは方法である。本発明では、距離センサにより検出された磁気マーカを、移動体の位置及び方位の推定に利用可能である。本発明によれば、測量対象である磁気マーカを利用して移動体の位置及び方位を推定しながら、磁気マーカの敷設位置を効率良く測量して特定できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
愛知製鋼株式会社
受け架台
16日前
愛知製鋼株式会社
車両用システム
10日前
愛知製鋼株式会社
磁気センサ装置
2か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
愛知製鋼株式会社
継ぎ目なし管の製造方法
5日前
愛知製鋼株式会社
測量方法及び測量システム
5か月前
愛知製鋼株式会社
磁気センサ素子の製造方法
2か月前
愛知製鋼株式会社
希土類磁石粉末の製造方法
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
11日前
愛知製鋼株式会社
マーカシステム及び制御方法
11日前
株式会社豊田中央研究所
外観検査装置
1か月前
株式会社豊田中央研究所
外観検査装置
1か月前
株式会社豊田中央研究所
外観検査装置
5日前
愛知製鋼株式会社
挿入用耐火物挿入装置、及び挿入用耐火物挿入方法
1か月前
トヨタ自動車株式会社
負極活物質及びその製造方法
9日前
愛知製鋼株式会社
水素吸蔵合金、アルカリ蓄電池用負極及びアルカリ蓄電池
1か月前
愛知製鋼株式会社
マルテンサイト系ステンレス鋼からなる高圧水素部品の製造方法
5か月前
国立研究開発法人産業技術総合研究所
磁気センサ及び磁気計測装置
5か月前
国立研究開発法人産業技術総合研究所
磁気センサ及び磁気計測装置
5か月前
トヨタ自動車株式会社
ニッケル水素電池用負極活物質及びその製造方法
11日前
愛知製鋼株式会社
高圧水素部品用マルテンサイト系ステンレス鋼、これを用いた高圧水素部品及びその製造方法
5か月前
個人
微小振動検出装置
9日前
ユニパルス株式会社
力変換器
1か月前
株式会社イシダ
X線検査装置
9日前
三菱電機株式会社
計測器
24日前
株式会社豊田自動織機
産業車両
1か月前
横浜ゴム株式会社
音響窓
1か月前
株式会社国際電気
試験装置
1か月前
株式会社辰巳菱機
システム
18日前
日置電機株式会社
測定装置
1か月前
個人
センサーを備えた装置
1か月前
日本精機株式会社
施工管理システム
1か月前
IPU株式会社
距離検出装置
1か月前
株式会社東芝
センサ
9日前
アンリツ株式会社
分光器
4日前
株式会社FRPカジ
FRP装置
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ