TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025042787
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023149925
出願日
2023-09-15
発明の名称
車両の制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B60W
10/08 20060101AFI20250321BHJP(車両一般)
要約
【課題】手動運転モードと自動運転モードとを切り替え可能に構成された車両の制御装置において、自動運転モードにおける乗員の快適性の低下を抑制する。
【解決手段】手動運転モードと自動運転モードとを切り替え可能に構成された車両を制御する制御装置であって、現在の車両の運転モードが、手動運転モードと自動運転モードとのいずれであるかを取得する運転モード取得部と、車両の減速トルクを制御する駆動制御部と、を備え、車両は、エンジンおよび動力源としてのモータを有し、駆動制御部は、運転モードが自動運転モードであることを含む予め定められた条件が満たされた場合、手動運転モードである場合と比較して、モータによりエンジンを駆動させるモータリング制御による減速トルクを抑制する。
【選択図】図1
特許請求の範囲
【請求項1】
手動運転モードと自動運転モードとを切り替え可能に構成された車両を制御する制御装置であって、
現在の前記車両の運転モードが、前記手動運転モードと前記自動運転モードとのいずれであるかを取得する運転モード取得部と、
前記車両の減速トルクを制御する駆動制御部と、
を備え、
前記車両は、エンジンおよび前記車両の動力源としてのモータを有し、
前記駆動制御部は、前記運転モードが前記自動運転モードであることを含む予め定められた条件が満たされた場合、前記手動運転モードである場合と比較して、前記モータにより前記エンジンを駆動させるモータリング制御による減速トルクを抑制する、
制御装置。
続きを表示(約 560 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記車両に搭載され、前記モータの回生により発生する回生電力により充電されるバッテリのSOCを取得するSOC取得部をさらに備え、
前記条件は、前記SOCが予め設定された第1閾値未満であることを、さらに含む、
制御装置。
【請求項3】
請求項2に記載の制御装置であって、
前記駆動制御部は、前記運転モードが前記手動運転モードである場合であって、前記SOCが予め設定された第2閾値未満である場合に、前記SOCが前記第2閾値以上である場合と比較して前記モータリング制御による減速トルクを抑制し、
前記第1閾値は、前記第2閾値よりも大きい値として設定されている、
制御装置。
【請求項4】
請求項1から請求項3のいずれか一項に記載の制御装置であって、
予め定められた複数の加減速モードであって、前記車両の加減速度をそれぞれ規定する複数の加減速モードのうち、前記車両の乗員により選択された加減速モードを取得する加減速モード取得部をさらに備え、
前記駆動制御部は、取得された前記加減速モードにより規定される加減速度に従って、前記車両の減速トルクを制御する、
制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の制御装置に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
手動運転モードと自動運転モードとを有する車両において、自動運転モードで減速制御を行う場合に、ブレーキ減速トルクに加えてモータの回生減速トルクを発生させる技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2019-119341号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
手動運転モードでは乗員の運転操作に応じた減速度を実現する必要があるという制限があるのに対して、自動運転モードでは減速度の制御においてそのような制限はない。特許文献1では、手動運転モードと自動運転モードとにおけるかかる減速度制御の制限の違いを考慮して自動運転モードにおける乗員の快適性の低下を抑制する手段について、十分に検討されていない。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の一形態によれば、手動運転モードと自動運転モードとを切り替え可能に構成された車両を制御する制御装置が提供される。この制御装置は、現在の前記車両の運転モードが、前記手動運転モードと前記自動運転モードとのいずれであるかを取得する運転モード取得部と、前記車両の減速トルクを制御する駆動制御部と、を備え、前記車両は、エンジンおよび前記車両の動力源としてのモータを有し、前記駆動制御部は、前記運転モードが前記自動運転モードであることを含む予め定められた条件が満たされた場合、前記手動運転モードである場合と比較して、前記モータにより前記エンジンを駆動させるモータリング制御による減速トルクを抑制する。
この形態の制御装置によれば、運転モードが自動運転モードである場合、手動運転モードである場合と比較してモータリング制御による減速トルクを抑制するので、自動運転モードにおける静粛性の低下を抑制でき、車両の乗員の快適性の低下を抑制できる。
(2)上記実施形態において、前記車両に搭載され、前記モータの回生により発生する回生電力により充電されるバッテリのSOCを取得するSOC取得部をさらに備え、前記条件は、前記SOCが予め設定された第1閾値未満であることを、さらに含んでもよい。
この形態の制御装置によれば、運転モードが自動運転モードである場合であって、SOCが予め設定された第1閾値未満である場合にモータリング制御による減速トルクを抑制する。このため、モータリング制御の抑制により減少した減速トルクをモータの回生抵抗を利用して補う際に、回生電力によってバッテリが過充電となることを抑制できる。
(3)上記実施形態において、前記駆動制御部は、前記運転モードが前記手動運転モードである場合であって、前記SOCが予め設定された第2閾値未満である場合に、前記SOCが前記第2閾値以上である場合と比較して前記モータリング制御による減速トルクを抑制し、前記第1閾値は、前記第2閾値よりも大きい値として設定されていてもよい。
この形態の制御装置によれば、運転モードが手動運転モードである場合であって、SOCが予め設定された第2閾値未満である場合に、SOCが予め設定された第2閾値以上である場合と比較してモータリング制御による減速トルクを抑制し、第1閾値は、第2閾値よりも大きい値として設定される。このため、自動運転モードでは手動運転モードよりも広いSOC領域においてモータリング制御を抑制できるので、静粛性の低下をより抑制でき、車両の乗員の快適性の低下を抑制できる。
(4)上記実施形態において、予め定められた複数の加減速モードであって、前記車両の加減速度をそれぞれ規定する複数の加減速モードのうち、前記車両の乗員により選択された加減速モードを取得する加減速モード取得部をさらに備え、前記駆動制御部は、取得された前記加減速モードにより規定される加減速度に従って、前記車両の減速トルクを制御してもよい。
この形態の制御装置によれば、予め定められた複数の加減速モードのうち、乗員により選択された加減速モードを取得し、取得された加減速モードにより規定される加減速度に従って、車両の減速トルクを制御する。このため、予め定められたひとつの加減速モードにより規定される加減速度に従って車両の減速トルクを制御する形態と比較して、乗員が自らの好みに応じて加減速度を選択でき、乗員の快適性の低下をより抑制できる。
【図面の簡単な説明】
【0007】
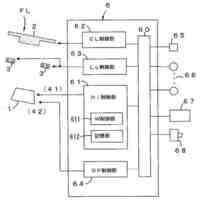
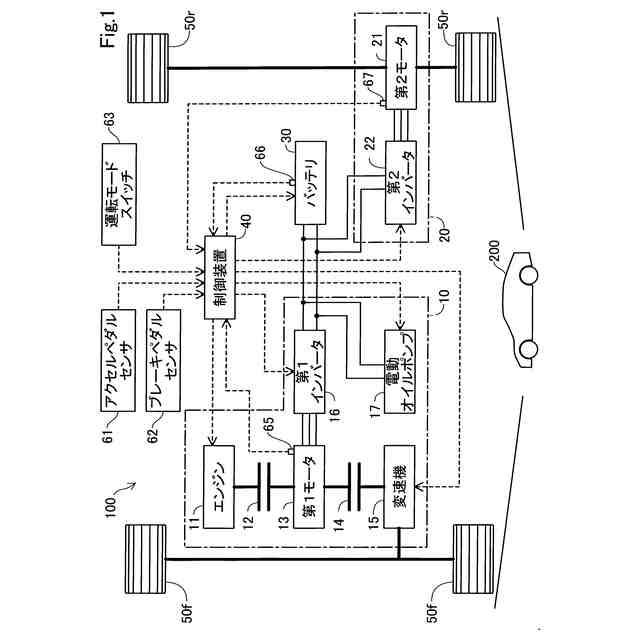
第1実施形態の制御装置を備える駆動システムの概略構成を示す説明図である。
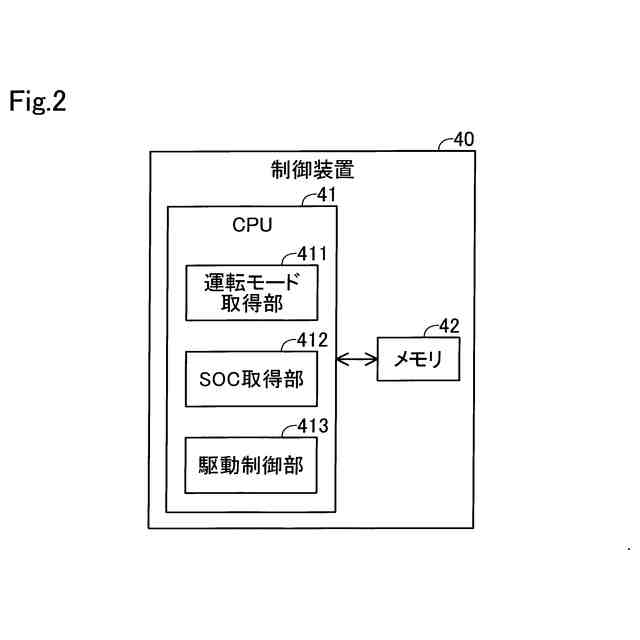
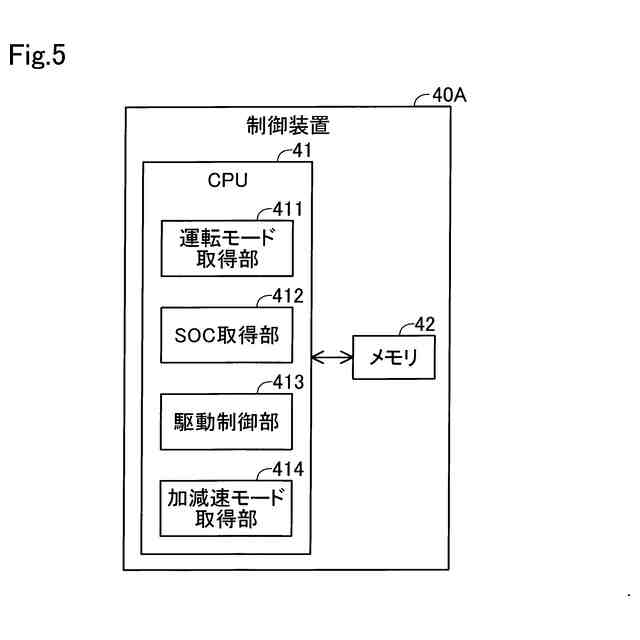
第1実施形態の制御装置の概略構成を示すブロック図である。
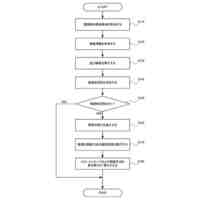
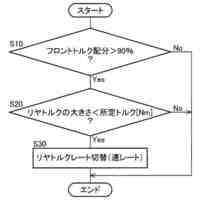
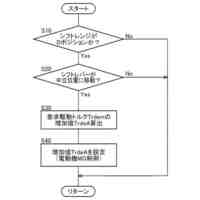
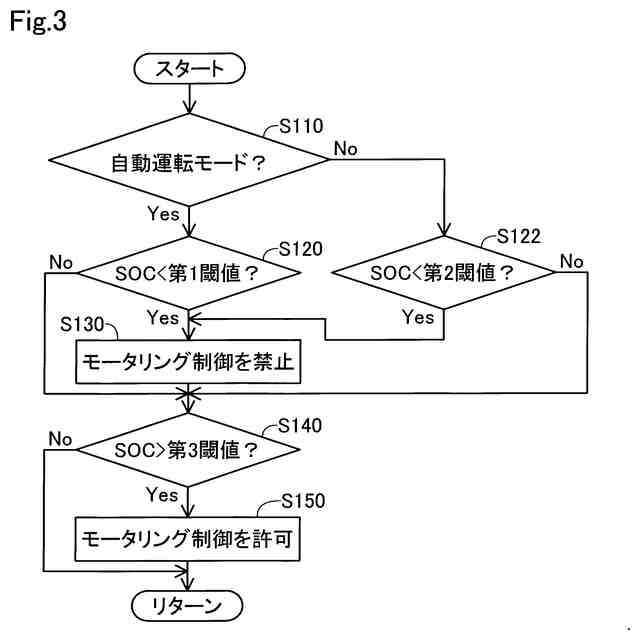
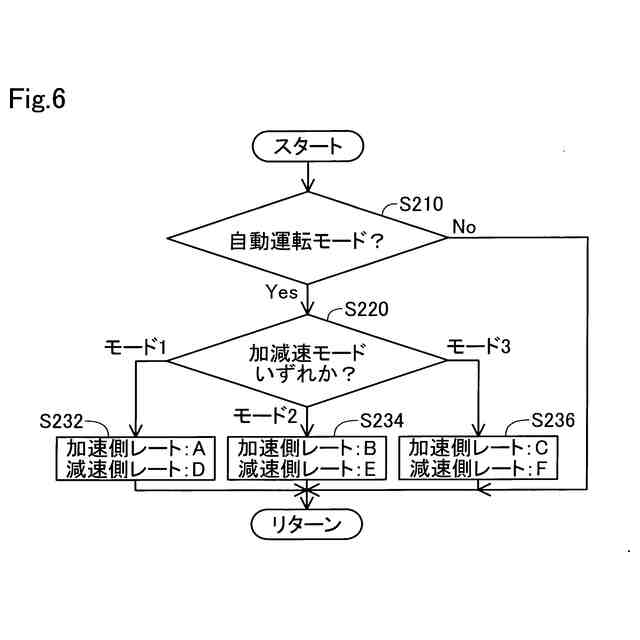
第1実施形態の制御装置における処理の手順を示すフローチャートである。
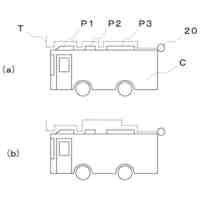
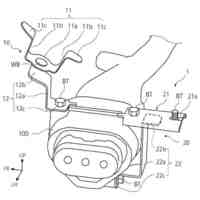
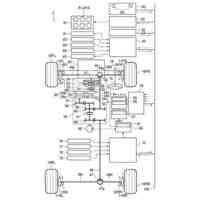
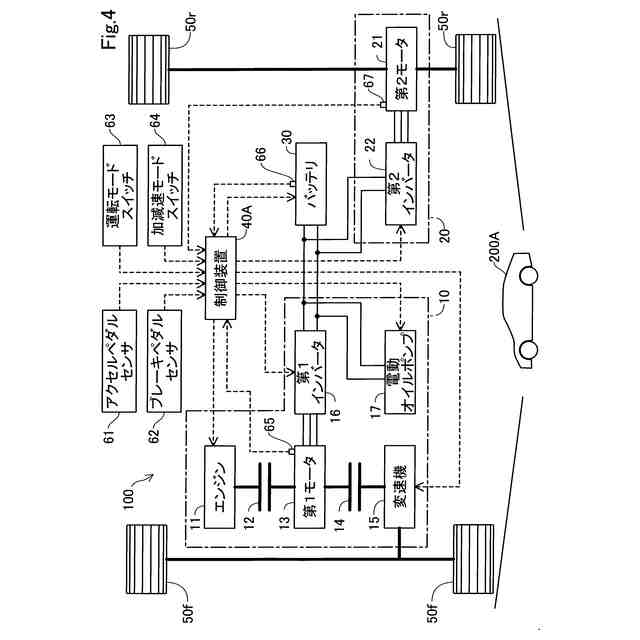
第2実施形態の制御装置を備える車両の概略構成を示す説明図である。
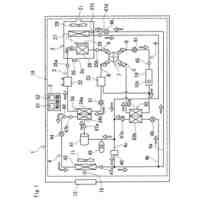
第2実施形態の制御装置の概略構成を示すブロック図である。
第2実施形態の制御装置において実行される処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0008】
A.第1実施形態:
A-1.システム構成:
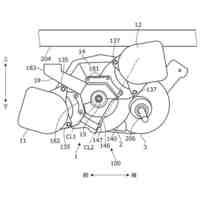
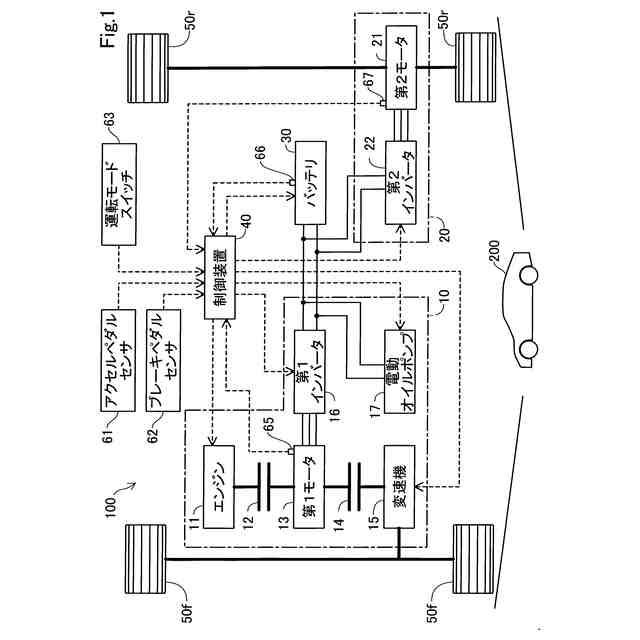
図1は、第1実施形態の制御装置40を備える駆動システム100の概略構成を示す説明図である。駆動システム100は、車両200に搭載されて、車両200の走行のための動力を伝達する。駆動システム100は、フロントユニット10と、リアユニット20と、バッテリ30と、制御装置40と、一対の前輪50fと、一対の後輪50rとを備える。駆動システム100は、後述するようにエンジンとモータとを備え、車両200は、エンジンとモータとの少なくとも一方を駆動力源として走行する。また、車両200は、運転モードとして、運転者の運転操作に従って走行する「手動運転モード」と、運転者の運転操作によらず制御装置40によって運転操作を自動制御されることにより走行する「自動運転モード」とを有する。本実施形態では、手動運転モードと自動運転モードとは、車両200に搭載された運転モードスイッチ63が運転者により操作されることにより切り替えられる。
【0009】
フロントユニット10は、エンジン11と、第1クラッチ12と、第1モータ13と、第2クラッチ14と、変速機15と、第1インバータ16と、電動オイルポンプ17とを有する。
【0010】
エンジン11は、車両200の第1の動力源である。エンジン11は、燃料供給システム(図示省略)から燃料を供給されて内燃機関動作を行うことにより、車両200の走行のための駆動トルクを発生する。エンジン11から出力された駆動トルクは、第1クラッチ12、第1モータ13、第2クラッチ14、および変速機15を介して、一対の前輪50fへ伝達される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
表示装置
1日前
日本精機株式会社
表示装置
1日前
個人
アンチロール制御装置
8日前
日本精機株式会社
照明装置
20日前
日本精機株式会社
表示装置
20日前
株式会社松華
懸架装置
20日前
個人
ステージカー
20日前
個人
自走式立体型洗車場
16日前
井関農機株式会社
作業車両
6日前
株式会社ユーシン
照明装置
1日前
コイト電工株式会社
座席装置
20日前
個人
農業機械への架線給電システム
12日前
株式会社小糸製作所
車両用灯具
1日前
エムケー精工株式会社
固定式洗車装置
8日前
株式会社SUBARU
車載装置
15日前
豊田合成株式会社
エアバッグ装置
16日前
スズキ株式会社
車両の報知制御装置
20日前
株式会社クボタ
作業車
19日前
豊田合成株式会社
ガラスラン
1日前
トヨタ紡織株式会社
送風装置
7日前
トヨタ自動車株式会社
路面状態予測装置
20日前
株式会社SUBARU
車両用サンバイザ
16日前
日本プラスト株式会社
車両用内装材
9日前
株式会社ブリヂストン
タイヤ
1日前
個人
走行ドローン
7日前
本田技研工業株式会社
車両駆動装置
8日前
日本プラスト株式会社
風向調整装置
1日前
オールセーフ株式会社
レール
16日前
トヨタ自動車株式会社
車両の制御装置
6日前
本田技研工業株式会社
車両下部の吊架構造体
14日前
豊田合成株式会社
コンソールボックス
6日前
トヨタ自動車株式会社
車両の制御装置
16日前
トヨタ自動車株式会社
車両の制御装置
16日前
株式会社アイシン
暖機システム
20日前
ダイハツ工業株式会社
車両用熱媒体循環装置
5日前
株式会社SUBARU
全輪駆動車の制御装置
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ