TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025040986
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148001
出願日
2023-09-13
発明の名称
可変ピッチプロペラを装備する一軸二舵船
出願人
ジャパン・ハムワージ株式会社
代理人
弁理士法人森本国際特許事務所
主分類
B63H
3/00 20060101AFI20250318BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】船体の前後左右に作用する推力を同じ大きさに制御し、高い精度の船位操船を行うことができる可変ピッチプロペラを装備する一軸二舵船を提供する。
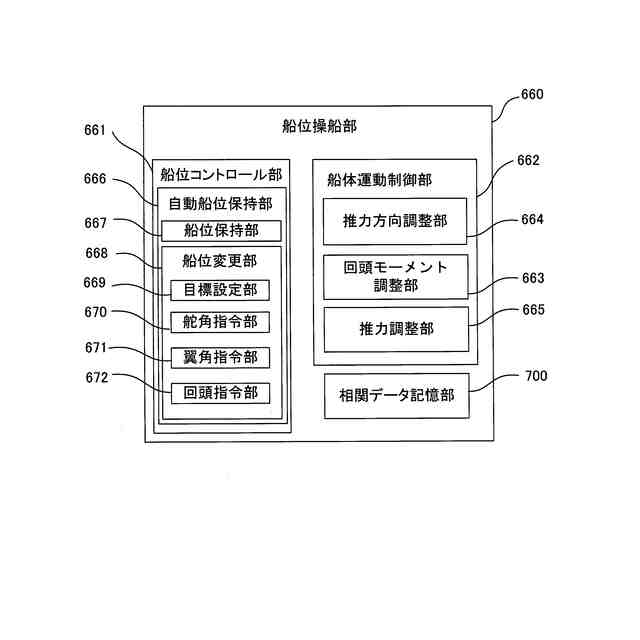
【解決手段】翼角指令部671は、相関データにおいて目標船体運動方向に向けて目標推力を生み出すために必要な目標プロペラ推力を算出し、目標プロペラ推力を出力するのに必要な目標翼角を算出し、算出した目標翼角を船体運動制御部662に指令する機能回路を有し、舵角指令部670は、相関データにおいて目標推力の船尾回りの推力を目標船体運動方向へ向けるために必要な目標舵角を算出し、算出した目標舵角を船体運動制御部662に指令する機能回路を有し、回頭指令部672は、現在船首方位を目標船首方位へ回頭するのに必要な目標回頭モーメントを算出し、算出した目標回頭モーメントを船体運動制御部に指令する機能回路を有する。
【選択図】図6
特許請求の範囲
【請求項1】
推力システムと推力システムを制御する操船システムを備え、
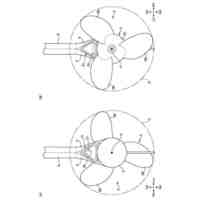
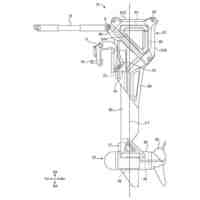
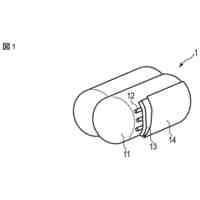
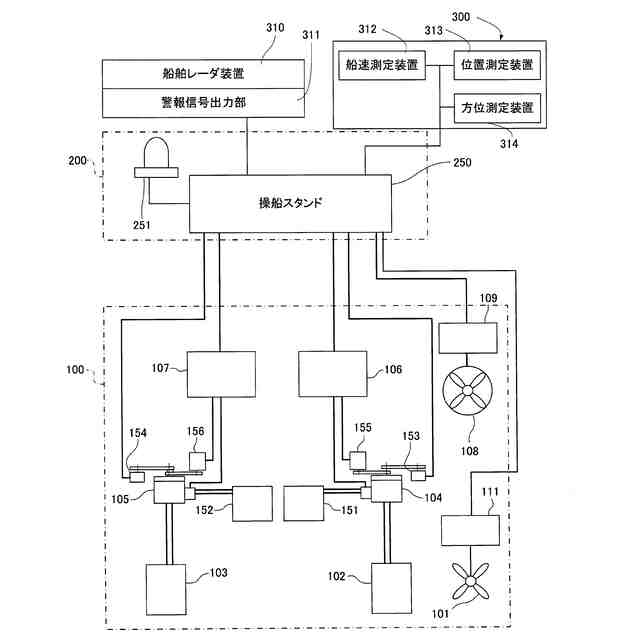
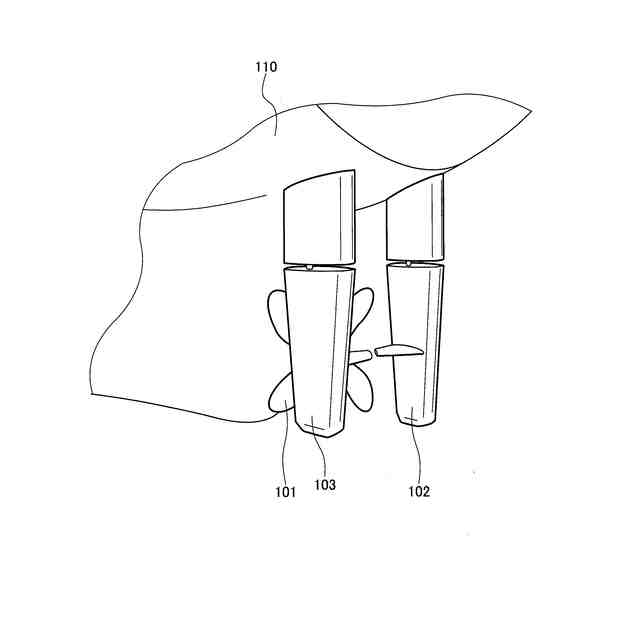
推力システムは、船尾に配置した一基の可変ピッチプロペラの推進プロペラと、推進プロペラの翼角を制御する翼角制御装置と、推進プロペラの後方に配置した左右一対の高揚力舵と、各高揚力舵をそれぞれ駆動する一対の舵取機と、船首スラスターと、船首スラスターを制御するスラスター制御装置を備え、
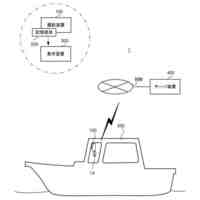
操船システムは、船体運動制御部と船位コントロール部を備え、
船体運動制御部は、翼角制御装置により可変ピッチプロペラの翼角を制御して、推進プロペラが前進方向に定速回転する状態でプロペラ推力を増減調整する推力調整部と、各舵取機により各高揚力舵のそれぞれを独立して種々の角度に作動させ、両舷の高揚力舵の舵角の組合せを変えることによって、プロペラ後流の方向を制御して船体に作用する船尾回りの推力の作用方向を調整する推力方向調整部と、スラスター制御装置により船首スラスターのスラスター推力を調整して回頭モーメントを制御する回頭モーメント調整部を有し、
船位コントロール部は、船位変更部と船位保持部を有する自動船位保持部を備え、
船位保持部は、船体運動制御部に指令する船位操船において、翼角を中立角として推進プロペラを低速域で前進方向に定速回転させ、2枚の高揚力舵を前進速度成分の生じないホバー舵角に保持し、船首方位を現在船首方位に維持する機能回路を有し、
船位変更部は、船体運動制御部に指令する船位操船において、低速域で推進プロペラを前進方向に定速回転させ、ホバー舵角を中心舵角として2枚の高揚力舵の舵角をホバー舵角周りにおいて制御するもので、相関データ記憶部と目標設定部と翼角指令部と舵角指令部と回頭指令部を有し、
相関データ記憶部は、プロペラ推力一定下で高揚力舵の舵角の組合せを変えた場合に生じる船尾回りの推力の大きさとその作用方向と舵角の相関を、可変ピッチプロペラの翼角の大きさが異なるプロペラ推力毎に規定した相関データを保有し、
目標設定部は、目標船首方位と目標船体運動方向と船尾回りの推力の目標推力を入力する機能回路を有し、
翼角指令部は、相関データにおいて目標船体運動方向に向けて目標推力を生み出すために必要な目標プロペラ推力を算出し、目標プロペラ推力を出力するのに必要な目標翼角を算出し、算出した目標翼角を船体運動制御部に指令する機能回路を有し、
舵角指令部は、相関データにおいて目標推力の船尾回りの推力を目標船体運動方向へ向けるために必要な目標舵角を算出し、算出した目標舵角を船体運動制御部に指令する機能回路を有し、
回頭指令部は、現在船首方位を目標船首方位へ回頭するのに必要な目標回頭モーメントを算出し、算出した目標回頭モーメントを船体運動制御部に指令する機能回路を有することを特徴とする可変ピッチプロペラを装備する一軸二舵船。
続きを表示(約 120 文字)
【請求項2】
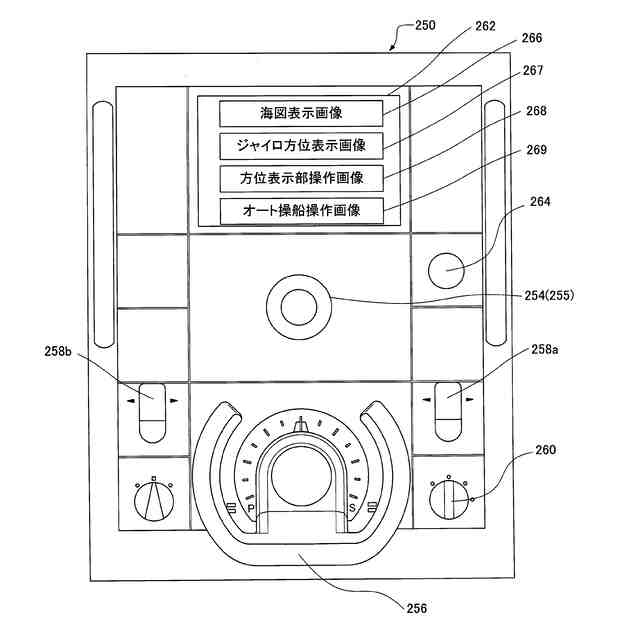
目標設定部は、ジョイスティックレバーを有し、レバーの傾倒方向により目標船体運動方向を指示し、レバーの傾倒角度により目標推力の大きさを指示することを特徴とする請求項1に記載の可変ピッチプロペラを装備する一軸二舵船。
発明の詳細な説明
【技術分野】
【0001】
本発明は、可変ピッチプロペラを装備する一軸二舵船に関し、定点保持等において高精度に操船できる技術に係るものである。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来、船舶に制動力を与える技術として特許文献1に記載する船舶の非常操船方法がある。これは、非常時に非常操舵手段を起動して通常の如何なる操舵モードよりも優先して舵制御手段を制御することにより、2枚の高揚力舵にプロペラ後流を後進推力として最大に作用させる舵角を与え、この後進推力により船舶の前進方向への慣性力に抗する後進力を船舶に与えて緊急停船ないし緊急後進させるものであり、推進プロペラを前進単一方向に作動させた状態において直ちに後進推力を得ることができ、少ない手数で短時間にかつ短い距離で船舶の停船ないし後進を行うことができる。
【0003】
さらに、特許文献2には、船位および船首尾方位保持操船においては、真横移動、斜め前後移動、その場回頭など特殊な運動を実現し、かつ、位置、速度等の高い操船精度が要求されるとして、船舶操縦装置が提案されている。この船舶操縦装置では、操船支援モードにおいて、指令部により指令運動方向と指令回頭モーメントと船首尾方向指令速度および船幅方向指令速度を船体運動制御部へ指令して操船し、推力分配部により、船体制御力および回頭船体制御力を、前進一定回転するプロペラ推進器の推力と2枚の高揚力舵の舵角の組み合わせとで発生させる目標推進器推力と、船首スラスターで発生させる目標スラスター推力とに分配する。
【先行技術文献】
【特許文献】
【0004】
特開平7-52887号
特開2017-052297
【発明の概要】
【発明が解決しようとする課題】
【0005】
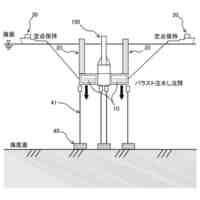
従来、水深の深い海域において船舶や浮体構造物の運動を定められた位置、方位、航路に対して高い精度で制御するものに、自動船位システム(Dynamic Positioning System:DPS)があり、風や波、潮流等の外乱から受ける外力に対抗するための制御力に推進プロペラやサイドスラスターを用いている。
【0006】
また、船舶が岸壁や他船などの周辺障害物の多い港湾内で安全に航行するためには、離岸流や向岸流の潮力、潮汐、風力等の船体に影響する外力の状況を考慮しつつ、常に自船と障害物からの離隔距離を認識しながら、慎重な操船をすることが要求される。
【0007】
また、2枚の高揚力舵を装備する一軸二舵船においては、2枚の高揚力舵の舵角の組み合わせによってプロペラ後流の分配方向が決まるが、プロペラ後流の分配方向によって船体に作用する推力が船首方向、船尾方向、右舷方向、左舷方向において一定ではなく、船幅方向の横力や左右の回頭モーメントに差があり、船位を一定位置に保持するホバー操船等において操船者の意図する船体運動と実際の船体運動とがわずかにずれる場合がある。
【0008】
本発明は上記した課題を解決するものであり、低速域で船位操船を行う際にプロペラ推力を適切な値に調整して船体の前後左右に作用する推力を同じ大きさに制御し、高い精度の船位操船を行うことができる可変ピッチプロペラを装備する一軸二舵船を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記した課題を解決するために、本発明の可変ピッチプロペラを装備する一軸二舵船は、推力システムと推力システムを制御する操船システムを備え、推力システムは、船尾に配置した一基の可変ピッチプロペラの推進プロペラと、推進プロペラの翼角を制御する翼角制御装置と、推進プロペラの後方に配置した左右一対の高揚力舵と、各高揚力舵をそれぞれ駆動する一対の舵取機と、船首スラスターと、船首スラスターを制御するスラスター制御装置を備え、操船システムは、船体運動制御部と船位コントロール部を備え、船体運動制御部は、翼角制御装置により可変ピッチプロペラの翼角を制御して、推進プロペラが前進方向に定速回転する状態でプロペラ推力を増減調整する推力調整部と、各舵取機により0各高揚力舵のそれぞれを独立して種々の角度に作動させ、両舷の高揚力舵の舵角の組合せを変えることによって、プロペラ後流の方向を制御して船体に作用する船尾回りの推力の作用方向を調整する推力方向調整部と、スラスター制御装置により船首スラスターのスラスター推力を調整して回頭モーメントを制御する回頭モーメント調整部を有し、船位コントロール部は、船位変更部と船位保持部を有する自動船位保持部を備え、船位保持部は、船体運動制御部に指令する船位操船において、翼角を中立角として推進プロペラを低速域で前進方向に定速回転させ、2枚の高揚力舵を前進速度成分の生じないホバー舵角に保持し、船首方位を現在船首方位に維持する機能回路を有し、船位変更部は、船体運動制御部に指令する船位操船において、低速域で推進プロペラを前進方向に定速回転させ、ホバー舵角を中心舵角として2枚の高揚力舵の舵角をホバー舵角周りにおいて制御するもので、相関データ記憶部と目標設定部と翼角指令部と舵角指令部と回頭指令部を有し、相関データ記憶部は、プロペラ推力一定下で高揚力舵の舵角の組合せを変えた場合に生じる船尾回りの推力の大きさとその作用方向と舵角の相関を、可変ピッチプロペラの翼角の大きさが異なるプロペラ推力毎に規定した相関データを保有し、目標設定部は、目標船首方位と目標船体運動方向と船尾回りの推力の目標推力を入力する機能回路を有し、翼角指令部は、相関データにおいて目標船体運動方向に向けて目標推力を生み出すために必要な目標プロペラ推力を算出し、目標プロペラ推力を出力するのに必要な目標翼角を算出し、算出した目標翼角を船体運動制御部に指令する機能回路を有し、舵角指令部は、相関データにおいて目標推力の船尾回りの推力を目標船体運動方向へ向けるために必要な目標舵角を算出し、算出した目標舵角を船体運動制御部に指令する機能回路を有し、回頭指令部は、現在船首方位を目標船首方位へ回頭するのに必要な目標回頭モーメントを算出し、算出した目標回頭モーメントを船体運動制御部に指令する機能回路を有することを特徴とする。
【0010】
本発明の可変ピッチプロペラを装備する一軸二舵船において、目標設定部は、ジョイスティックレバーを有し、レバーの傾倒方向により目標船体運動方向を指示し、レバーの傾倒角度により目標推力の大きさを指示することを特徴とする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
船用横揺防止具
2か月前
個人
補助機構
28日前
個人
コンパクトシティ船
27日前
個人
渦流動力推進構造
22日前
株式会社フルトン
水中捕捉装置
29日前
個人
スクリュープロペラ
17日前
個人
回転式による流体流出防止タンカー
28日前
オーケー工業株式会社
係留フック
1か月前
スズキ株式会社
船外機
15日前
スズキ株式会社
船外機
15日前
株式会社ユピテル
システム及びプログラム等
1日前
株式会社大林組
浮体式構造物の設置方法
1か月前
スズキ株式会社
電動船外機
15日前
ヤマハ発動機株式会社
船外機および船舶
2か月前
スズキ株式会社
微小塵捕捉装置
15日前
カナデビア株式会社
浮体構造物
22日前
株式会社赤阪鉄工所
エンジン装置
8日前
川崎重工業株式会社
船舶
1日前
川崎重工業株式会社
船舶
1日前
三菱造船株式会社
船舶
7日前
三菱造船株式会社
船舶
1か月前
ヤマハ発動機株式会社
船舶
1か月前
川崎重工業株式会社
舵取機
1か月前
啓東恒昊船舶科技有限公司
船舶フェアリーダシース
1日前
戸田建設株式会社
スパー型洋上風力発電設備の建造方法
2か月前
川崎重工業株式会社
液化ガス運搬船
1か月前
株式会社名村造船所
低温液体運搬船
1か月前
個人
フィン
1日前
株式会社 商船三井
貨物タンク
1か月前
住友重機械マリンエンジニアリング株式会社
船舶
14日前
大成建設株式会社
仮設フロータ
6日前
住友重機械マリンエンジニアリング株式会社
船舶
7日前
住友重機械マリンエンジニアリング株式会社
船舶
7日前
住友重機械マリンエンジニアリング株式会社
船舶
8日前
住友重機械マリンエンジニアリング株式会社
船舶
7日前
積水化学工業株式会社
支持部材及び盤木装置
6日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ