TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025040117
公報種別
公開特許公報(A)
公開日
2025-03-24
出願番号
2023146833
出願日
2023-09-11
発明の名称
車両の路面勾配検出装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B60W
40/076 20120101AFI20250314BHJP(車両一般)
要約
【課題】走行している路面の勾配を高い精度で算出することが可能な車両の路面勾配検出装置を提供する。
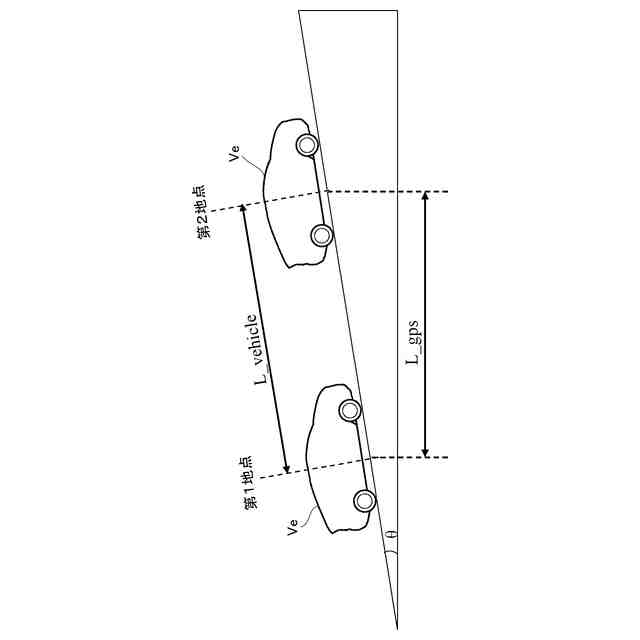
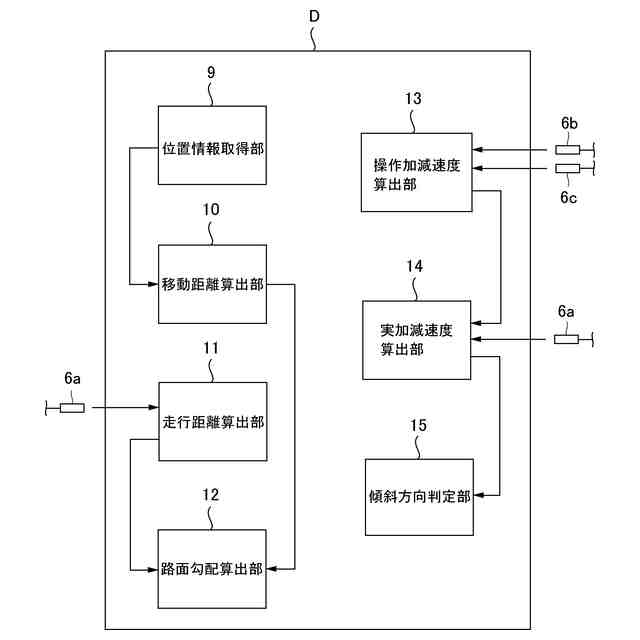
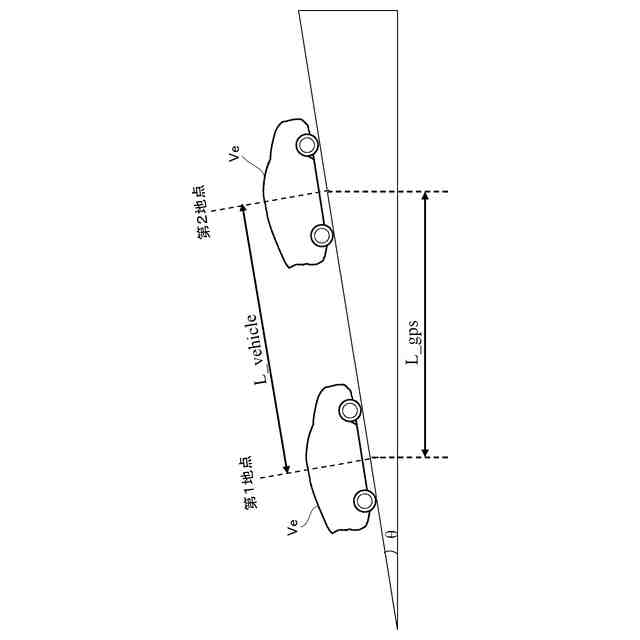
【解決手段】車両Veの路面勾配検出装置であって、車両Veの現在位置を検出する位置情報取得部と、車両Veの現在位置に基づき車両Veが所定の第1地点から所定の第2地点まで走行したときの車両Veの水平方向における移動距離L_gpsを算出する移動距離算出部と、車両Veが第1地点から第2地点まで実際に走行した距離である走行距離L_vehivleを算出する走行距離算出部と、移動距離L_gpsと走行距離L_vehivleとに基づいて路面の勾配を算出する路面勾配算出部と、車両Veが第1地点から第2地点まで走行したときの要求加速度と実加速度とに基づいて、路面が上り勾配であるか下り勾配であるかを判定する傾斜方向判定部と、を備えている。
【選択図】図3
特許請求の範囲
【請求項1】
車両が現在走行している路面の勾配を算出する車両の路面勾配検出装置であって、
前記車両の現在位置を検出する位置情報取得部と、
前記位置情報取得部によって取得した前記車両の前記現在位置に基づき、前記車両が所定の第1地点から所定の第2地点まで走行したときの前記車両の水平方向における移動距離を算出する移動距離算出部と、
前記車両が前記第1地点から前記第2地点まで走行したときに、前記車両が前記路面上を実際に走行した距離である走行距離を算出する走行距離算出部と、
前記移動距離と前記走行距離とに基づいて前記路面の前記勾配を算出する路面勾配算出部と、
前記車両が前記第1地点から前記第2地点まで走行したときの、前記車両に対する要求加速度と、前記車両の実際の加速度である実加速度とに基づいて、前記路面が上り勾配であるか下り勾配であるかを判定する傾斜方向判定部と、を備えている
ことを特徴とする車両の路面勾配検出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両が走行している路面の勾配を検出するための検出装置に関するものである。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1には、車両が駆動しているもしく制動しているなどの状態であっても路面の勾配を検出することを目的とした車両用路面勾配検出装置が開示されている。特許文献1の装置では、勾配のある路面を走行しているときに車両に生じる慣性力に基づいて、路面勾配を検出するように構成されている。具体的には、特許文献1の装置では、路面に沿う方向を基準に、所定時間内における所定の時間間隔ごとに加速度センサによって検出された瞬間的な加速度の平均値、および、車速センサによって検出された車速の微分値(加速度)を算出する。そして、それらを加算することによって車両に作用している加速度を算出し、その加速度に対する重力加速度の比率に基づき、三角比を用いて路面勾配を演算する。特許文献1では、このような構成により、検出される加速度に路面勾配と重力加速度とに応じた値が含まれることになるので、正確な路面勾配を求めることができる、としている。
【先行技術文献】
【特許文献】
【0003】
特開平5ー272974号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の装置では、上述した構成により、検出された車両の前後方向加速度と車速とに基づいて路面勾配を求めるので、車両が加速もしくは減速している場合であっても路面勾配を求めることができる。一方で、特許文献1の装置では、路面勾配を算出する際に、車速センサによって実際の車両の加速度を算出したり、加速度センサによって加速度の瞬時値の平均値を算出したりしている。つまり、異なるセンサが用いられており、検出される値の物理量が異なるため、特許文献1の装置では、検出された値を同一の物理量とするための演算を行った後に勾配を算出している。しかしながら、それらのうちの一方を検出あるいは算出している間に他方の検出値が大幅に変化するなどした場合には、算出される値に誤差が含まれる可能性がある。例えば、検出を行う複数の地点間において、車速が急激に変化した場合と、車速の変化が小さい場合とで、算出される値が変わってしまう可能性があり、求められる路面勾配の精度が低くなってしまうおそれがあった。
【0005】
本発明は、上記の技術的課題に着目してなされたものであって、走行している路面の勾配を高い精度で算出することが可能な車両の路面勾配検出装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明は、上記の目的を達成するために、車両が現在走行している路面の勾配を算出する車両の路面勾配検出装置であって、前記車両の現在位置を検出する位置情報取得部と、前記位置情報取得部によって取得した前記車両の前記現在位置に基づき、前記車両が所定の第1地点から所定の第2地点まで走行したときの前記車両の水平方向における移動距離を算出する移動距離算出部と、前記車両が前記第1地点から前記第2地点まで走行したときに、前記車両が前記路面上を実際に走行した距離である走行距離を算出する走行距離算出部と、前記移動距離と前記走行距離とに基づいて前記路面の前記勾配を算出する路面勾配算出部と、前記車両が前記第1地点から前記第2地点まで走行したときの、前記車両に対する要求加速度と、前記車両の実際の加速度である実加速度とに基づいて、前記路面が上り勾配であるか下り勾配であるかを判定する傾斜方向判定部と、を備えていることを特徴とするものである。
【発明の効果】
【0007】
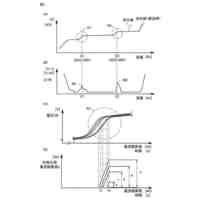
本発明の車両の路面勾配検出装置によれば、車両が走行している路面の勾配を、距離に基づいて算出するように構成されている。つまり、路面勾配検出装置は、位置情報取得部によって所定の第1地点と第2地点との水平方向の距離である移動距離および第1地点から第2地点まで実際に車両が走行した距離である走行距離を算出し、それらに基づいて路面の勾配を検出する。つまり、同一の物理量のパラメータのみを用いるので、車両の速度や加速度などに基づいて路面の勾配を算出する場合と比較して、算出される路面の勾配に誤差が生じることを抑制することができる。すなわち、路面の勾配の大きさを精度良く検出することができる。
【図面の簡単な説明】
【0008】
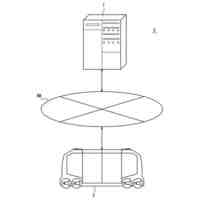
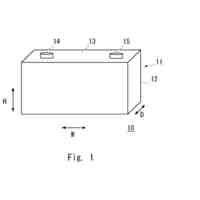
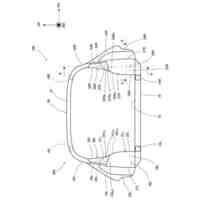
本発明の実施形態における路面勾配検出装置が搭載された車両の一例を示す図である。
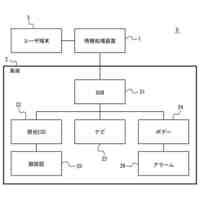
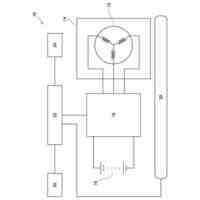
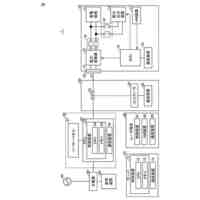
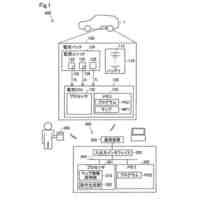
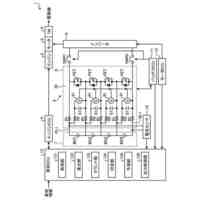
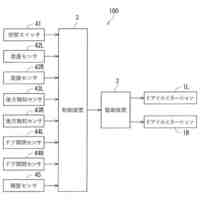
本発明の実施形態における路面勾配検出装置の機能構成を説明するためのブロック図である。
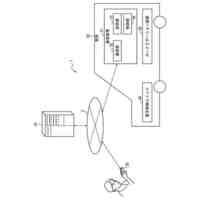
路面の勾配を算出するためのパラメータである移動距離および走行距離を説明するための説明図である。
【発明を実施するための形態】
【0009】
以下、本発明を図に示す実施形態に基づいて説明する。以下に説明する実施形態は本発明を具体化した場合の一例に過ぎないのであって、本発明を限定するものではない。
【0010】
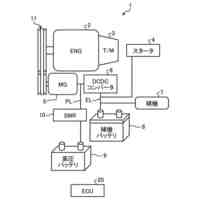
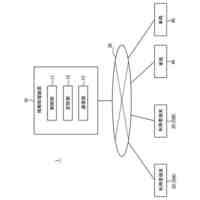
図1に、本発明の実施形態における路面勾配検出装置Dが搭載された車両Veの駆動系統および制御系統の一例を示してある。図1に示す車両Veは、駆動力源1の出力トルクを、トランスミッション2やデファレンシャルギヤ(図示せず)等を介して、車輪(前輪)3へ伝達する構成となっている。さらに、車両Veは、ブレーキ装置4、ステアリング装置5、検出部6、および、コントローラ(ECU)7を備えている。車両Veは、図1に示すように、駆動トルクを前輪(駆動輪)3に伝達し、前輪3で駆動力を発生させる前輪駆動車であるが、後輪8で駆動力を発生させる後輪駆動車や、前輪3および後輪8の両方で駆動力を発生させる四輪駆動車であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
飛行体
1日前
トヨタ自動車株式会社
正極層
1日前
トヨタ自動車株式会社
電動車
3日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
二次電池
2日前
トヨタ自動車株式会社
蓄電セル
9日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
蓄電セル
2日前
トヨタ自動車株式会社
蓄電セル
2日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
通信装置
6日前
トヨタ自動車株式会社
システム
9日前
トヨタ自動車株式会社
蓄電セル
8日前
トヨタ自動車株式会社
蓄電セル
8日前
トヨタ自動車株式会社
蓄電セル
8日前
トヨタ自動車株式会社
駆動装置
2日前
トヨタ自動車株式会社
内燃機関
2日前
トヨタ自動車株式会社
電池パック
8日前
トヨタ自動車株式会社
電池ケース
3日前
トヨタ自動車株式会社
身体支持具
3日前
トヨタ自動車株式会社
インソール
8日前
トヨタ自動車株式会社
電池ケース
2日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
情報処理方法
2日前
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
劣化予測装置
9日前
トヨタ自動車株式会社
車両後部構造
8日前
トヨタ自動車株式会社
電池システム
2日前
トヨタ自動車株式会社
情報処理装置
8日前
トヨタ自動車株式会社
照明システム
9日前
トヨタ自動車株式会社
情報処理装置
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ