TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025039176
公報種別
公開特許公報(A)
公開日
2025-03-21
出願番号
2023146068
出願日
2023-09-08
発明の名称
走行パターン生成装置、車両及び走行パターン生成方法
出願人
株式会社日立製作所
代理人
弁理士法人サンネクスト国際特許事務所
主分類
B61L
27/14 20220101AFI20250313BHJP(鉄道)
要約
【課題】高い安全性及び定時性を確保でき、余裕時分も確保できる走行パターン生成装置、車両及び走行パターン生成方法を提供する。
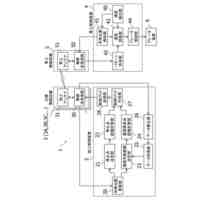
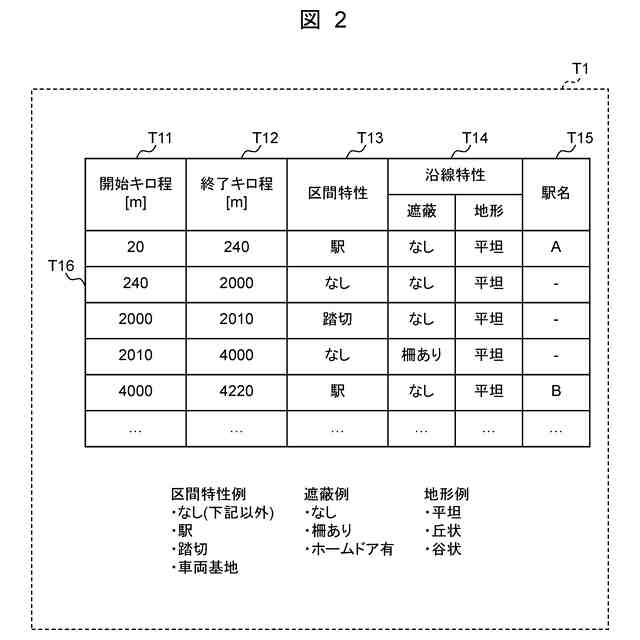
【解決手段】障害物の検知性能を表す検知性能情報と、走行区間の種別及び周囲物体の特性を表す区間特性マップと、標準制限速度情報と、車両位置情報と、標準運転曲線情報と、標準制限速度情報又は検知性能情報により定義される複数の対策候補それぞれに対し、走行区間ごとに、区間特性マップと対策候補を用いて、走行区間において衝突発生時における人的被害及び車両被害の両方またはいずれか一方の発生頻度及び被害度合いを考慮した指標である危険度と、余裕時分とを求め、危険度と余裕時分を基に対策を選択し、対策制限速度を算出する危険度評価及び対策検討部と、対策制限速度に関する対策制限速度情報、標準運転曲線情報及び車両位置情報に基づき、次駅までの走行パターンを算出する走行パターン生成部と、を備える。
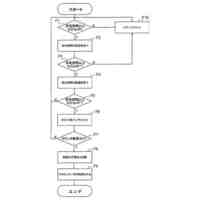
【選択図】図2
特許請求の範囲
【請求項1】
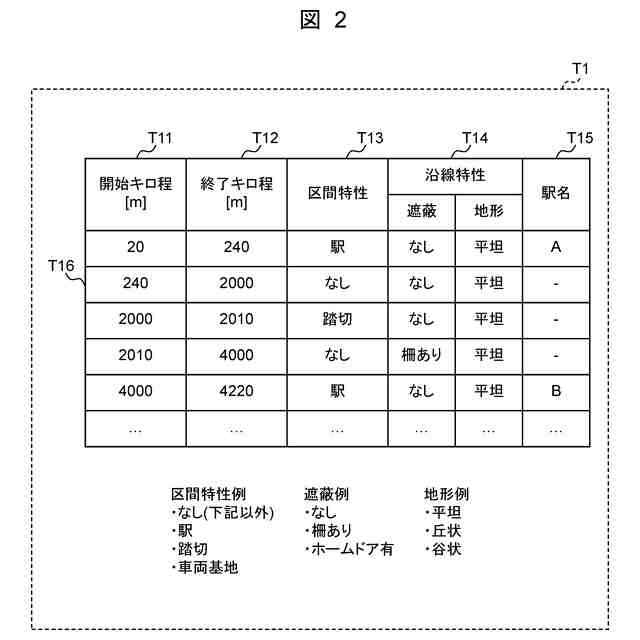
障害物の検知性能を表す検知性能情報と、
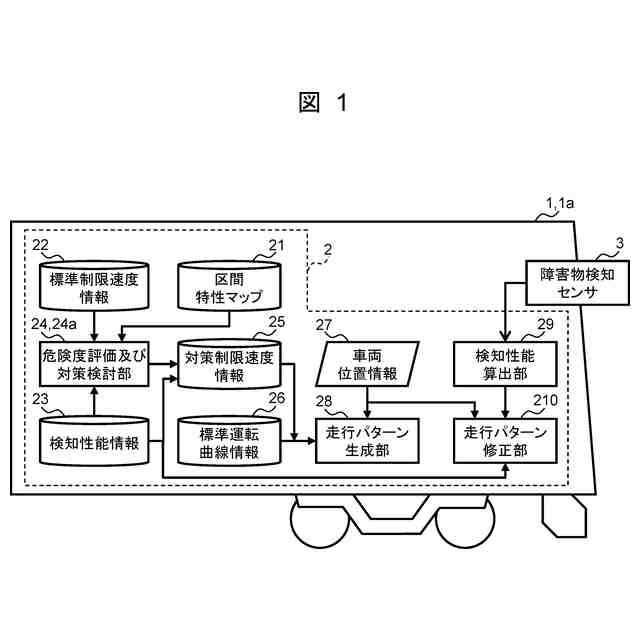
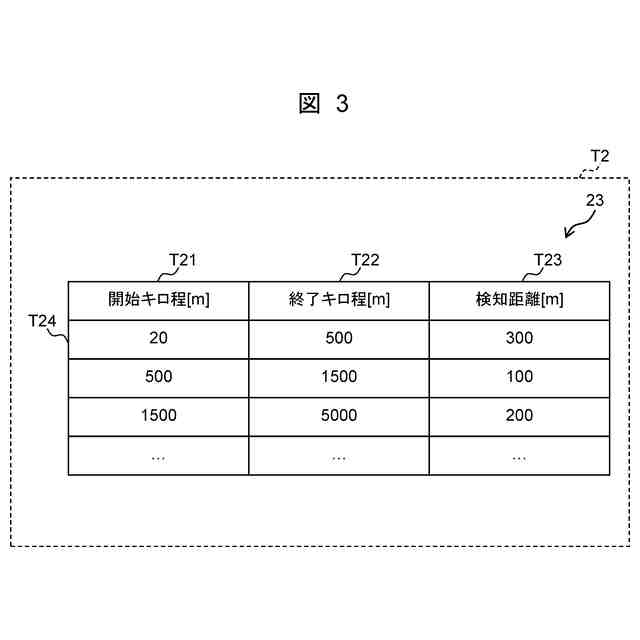
走行区間の種別及び周囲物体の特性を表す区間特性マップと、
車両が走行する際の標準制限速度に関する標準制限速度情報と、
前記車両の位置を表す車両位置情報と、
前記車両がダイヤを守るために設定された走行態様を表す標準運転曲線情報と、
前記標準制限速度情報又は前記検知性能情報により定義される複数の対策候補それぞれに対し、前記走行区間ごとに、前記区間特性マップと前記対策候補を用いて、前記走行区間において衝突発生時における人的被害及び車両被害の両方またはいずれか一方の発生頻度及び被害度合いを考慮した指標である危険度と、余裕時分とを求め、前記危険度と前記余裕時分を基に、前記対策候補から対策を選択し、前記対策に対応する対策制限速度を算出する危険度評価及び対策検討部と、
前記対策制限速度に関する対策制限速度情報、前記標準運転曲線情報及び前記車両位置情報に基づき、次駅までの走行パターンを算出する走行パターン生成部と、
を備えることを特徴とする走行パターン生成装置。
続きを表示(約 2,000 文字)
【請求項2】
前記危険度評価及び対策検討部は、
前記対策として、少なくとも、
前記障害物の検知距離に第一の所定値を加算した距離で停車できる速度と前記標準制限速度との内小さい方を制限速度とする第1の対策と、前記検知距離から第二の所定値を減算した距離で停車できる速度と前記標準制限速度との内小さい方を制限速度として走行する第2の対策とのいずれかを選択する
ことを特徴とする請求項1に記載の走行パターン生成装置。
【請求項3】
前記危険度評価及び対策検討部は、
前記対策として、前記第1の対策、前記第2の対策、または、
検知距離から第三の所定値を減算した距離で停車できる速度と前記標準制限速度との内小さい方を制限速度とする第3の対策を選択し、
前記第3の対策の制限速度は、前記第2の対策の制限速度以下である
ことを特徴とする請求項2に記載の走行パターン生成装置。
【請求項4】
前記危険度評価及び対策検討部は、
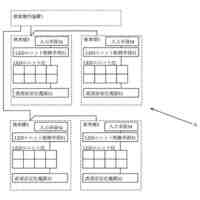
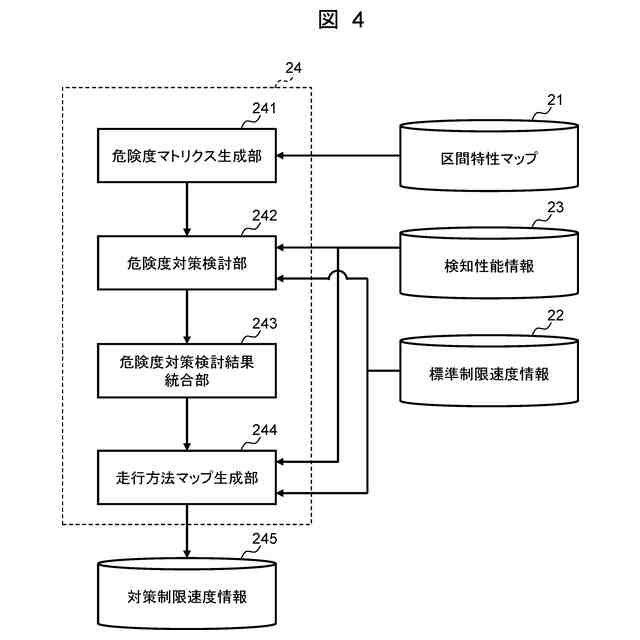
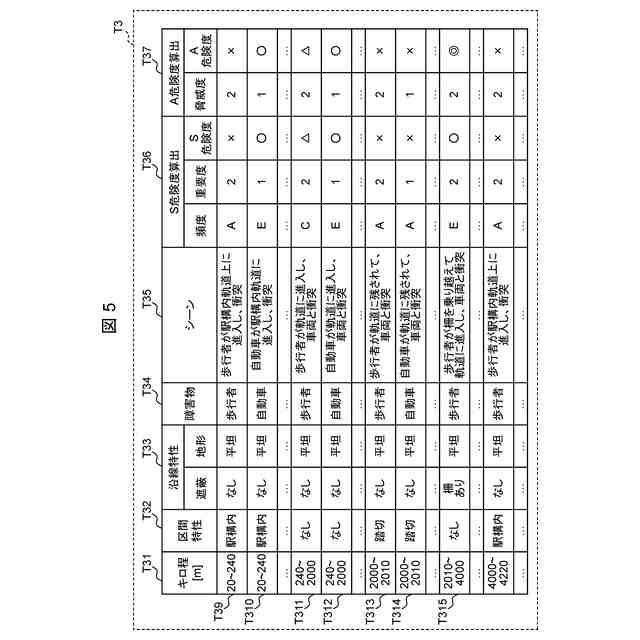
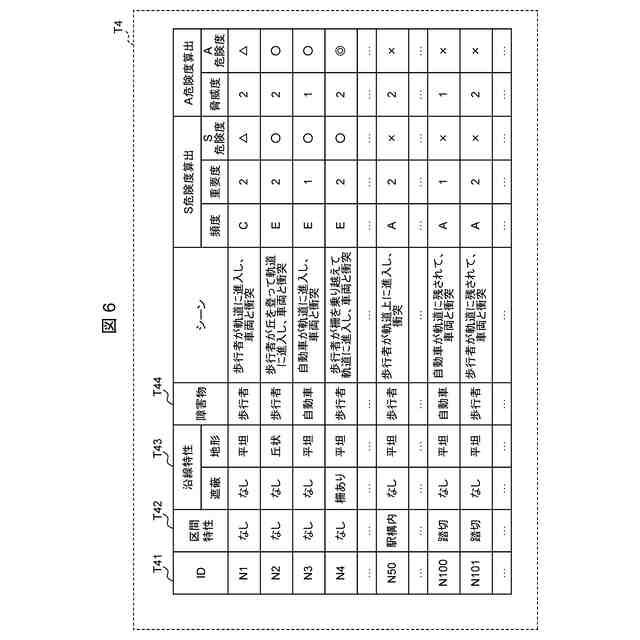
前記区間特性マップを用い、各走行区間において、走行区間特性、沿線特性、想定される障害物に対応する車両脅威度、人的被害度、障害物の出現頻度に基づき、前記危険度を含む危険度マトリクスを生成する危険度マトリクス生成部と、
前記危険度マトリクス、前記検知性能情報、前記標準制限速度情報を用い、前記対策候補を実施した場合における危険度再評価結果、前記余裕時分を少なくとも含む情報を纏めた対策候補マトリクスを生成する危険度対策検討部と、
前記対策候補マトリクスに基づいて前記対策候補から対策を選択した結果を用い、走行区間毎の対策検討結果としてまとめた対策検討後マトリクスを生成する危険度対策検討結果統合部と、
前記対策検討後マトリクス、前記検知性能情報、前記標準制限速度情報を用い、前記対策の対策開始位置及び対策終了位置並びに前記対策実施時の制限速度から前記対策制限速度情報を出力する走行方法マップ生成部と、
を有することを特徴とする請求項1に記載の走行パターン生成装置。
【請求項5】
前記検知性能に基づき制限速度を決定する前記対策を行う区間の開始点は、前記検知性能に基づき制限速度を決定する前記対策を行う区間に対応する走行区間特性及び沿線特性の開始地点よりも所定の距離手前である
ことを特徴とする請求項1に記載の走行パターン生成装置。
【請求項6】
前記所定の距離とは、前記検知性能に基づき制限速度を決定する前記対策で用いられる
制限速度で停車することができる距離である
ことを特徴とする請求項5に記載の走行パターン生成装置。
【請求項7】
前記危険度評価及び対策検討部は、
前記走行区間ごとに、前記対策候補の中から、前記危険度が所定の水準を満たし、かつ前記余裕時分が所定の値以上である前記対策を選択する
ことを特徴とする請求項1に記載の走行パターン生成装置。
【請求項8】
前記車両の前方の障害物または前方レールを検知する障害物検知センサの現在の検知性能を算出する検知性能算出部と、
前記現在の検知性能を基に、前記現在の検知性能に基づき走行する区間における検知性能の推定結果を求め、前記検知性能の推定結果と、前記車両位置情報を基に、前記走行パターン生成部が出力する走行パターンを補正する走行パターン補正部と、
を備えることを特徴とする請求項1に記載の走行パターン生成装置。
【請求項9】
前記走行パターン補正部は、
前記現在の検知性能に基づき走行する区間より前に、現在の検知能力を推定するための推定区間を設定し、
前記推定区間の終了位置として、
前記現在の検知性能に基づき走行する区間の開始点において前記現在の検知性能に基づき走行する区間で想定される検知性能が低下した場合に、当該推定区間の終了位置から減速を開始し、前記現在の検知性能に基づき走行する区間の開始点までに、低下した検知性能に対応する制限速度まで減速可能な位置を設定する
ことを特徴とする請求項8に記載の走行パターン生成装置。
【請求項10】
前記走行パターン補正部は、
現在位置における前記障害物検知センサの検知能力としての第一の検知距離を、過去に同地点で取得した前記障害物検知センサの検知能力としての第二の検知距離で割ることで劣化係数を算出し、事前に定義されている検知性能に基づき走行する区間の検知距離に前記劣化係数を乗算することにより、前記障害物検知センサの検知性能の推定結果を求める
ことを特徴とする請求項8または請求項9に記載の走行パターン生成装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は走行パターン生成装置、車両及び走行パターン生成方法に関し、例えば、安全性を確保しつつ余裕時分も確保しうる車両の走行パターンを生成する走行パターン生成装置及び車両に適用して好適なものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
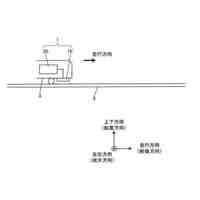
鉄道輸送事業におけるコスト削減のため、無人運転が注目されている。無人運転システムは外界環境と隔離された新交通などにおいては実用化が進められているが、近年、自動車や歩行者といった他交通との交差がある鉄道システムへの導入検討が行われている。しかし、このような鉄道システムは走行路に車両走行の支障となる物体(以下「障害物」と呼ぶ)が容易に進入可能であることから、障害物との衝突を回避、或いは衝突被害を軽減する技術が必要となる。このことを受け、車上外界センサによる障害物の検知技術の開発が行われている他、外界センサを搭載する車両の無人運転に対する安全性の向上を目的とした、走行パターンを生成することが検討されている。
【0003】
外界センサを搭載した無人運転車両は、車両前方の障害物を検知し次第減速を行い、障害物との衝突回避、或いは衝突被害の軽減を行うことが求められる。このような鉄道システムにおいて外界センサの障害物の検知能力を超えた状態、例えば検知可能な距離を超過した速度で走行すると、走行中前方に障害物を発見してもブレーキが間に合わず、障害物との衝突を回避することが難しい。従って、外界センサの障害物の検知能力を考慮した走行パターンを生成することが重要となる。一方、鉄道ダイヤを守ることも鉄道サービス性の維持に必要であり、以下の特許文献1、2には、障害物の検知能力及び鉄道ダイヤの定時性を考慮した技術が開示されている。
【0004】
特許文献1では、障害物との衝突といったリスクを考慮した、区間ごとのリスク値とダイヤで規定された走行時間を保有し、走行時間に応じた所定の条件を満たし、かつリスクインパクトが最小となる走行パターンを生成することにより、駅間の走行時間を満たしつつ、軌道輸送システムと障害物との衝突リスクの軽減を可能とする技術が開示されている。
【0005】
特許文献2では、車両前方の障害物の検知可能な距離に基づいて制限パターンを作成し、この制限パターンに基づき初期パターンを作成し、この初期パターンで駅間の走行時間を満たすことができない場合は、当該走行時間から所定時分以内となるように上記初期パターンを修正した修正パターンを使用し、走行パターンを算出する技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
特許第7164306号公報
特開2023-37434号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に開示された技術では、上述したように軌道輸送システムと障害物との衝突リスクの軽減を可能としつつ、障害物の出現頻度に係るリスクに基づいたダイヤ通りの走行が可能であるものの、各区間のリスク値に鑑み、高い安全性及び定時性を確保しつつ適切な位置で余裕時分をいかに確保するかについては考慮されていない。
【0008】
また、特許文献2に開示された技術では、上述したように走行時間から所定時分以内となるように初期パターンを修正した修正パターンを使用し、走行パターンを算出するものの、危険事象の頻度及び被害を考慮し、高い安全性及び定時性を確保しつつ余裕時分を確保することについては考慮されていない。
【0009】
本発明は以上の点を考慮してなされたもので、高い安全性及び定時性を確保できるだけでなく、余裕時分も確保することができる走行パターン生成装置、車両及び走行パターン生成方法を提案しようとするものである。
【課題を解決するための手段】
【0010】
かかる課題を解決するため本発明においては、障害物の検知性能を表す検知性能情報と、走行区間の種別及び周囲物体の特性を表す区間特性マップと、車両が走行する際の標準制限速度に関する標準制限速度情報と、前記車両の位置を表す車両位置情報と、前記車両がダイヤを守るために設定された走行態様を表す標準運転曲線情報と、前記標準制限速度情報又は前記検知性能情報により定義される複数の対策候補それぞれに対し、前記走行区間ごとに、前記区間特性マップと前記対策候補を用いて、前記走行区間において衝突発生時における人的被害及び車両被害の両方またはいずれか一方の発生頻度及び被害度合いを考慮した指標である危険度と、余裕時分とを求め、前記危険度と前記余裕時分を基に、前記対策候補から対策を選択し、前記対策に対応する対策制限速度を算出する危険度評価及び対策検討部と、前記対策制限速度に関する対策制限速度情報、前記標準運転曲線情報及び前記車両位置情報に基づき、次駅までの走行パターンを算出する走行パターン生成部と、を備えるようにした。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
コンテナ輸送システム
7か月前
日本信号株式会社
検査装置
3か月前
コイト電工株式会社
暖房装置
8か月前
株式会社新陽社
発車標
7か月前
コイト電工株式会社
暖房装置
8か月前
日本車輌製造株式会社
鉄道車両
7か月前
日本車輌製造株式会社
鉄道車両
7か月前
日本信号株式会社
ホーム柵装置
6日前
近畿車輌株式会社
鉄道車両の床構造
4か月前
近畿車輌株式会社
鉄道車両の床構造
4か月前
近畿車輌株式会社
鉄道車両の床構造
4か月前
保線機器整備株式会社
保線用カート
2か月前
カヤバ株式会社
鉄道車両用制振装置
8か月前
カヤバ株式会社
鉄道車両用制振装置
3か月前
川崎車両株式会社
鉄道車両用パネル
1か月前
日本信号株式会社
物体検知装置
3日前
日本信号株式会社
ホーム安全システム
7日前
日本信号株式会社
踏切道監視システム
4か月前
ヤマハ発動機株式会社
無人搬送車
6日前
株式会社ダイフク
搬送設備
6か月前
ヤマハ発動機株式会社
無人搬送車
6日前
シャープ株式会社
表示装置
5か月前
ヤマハ発動機株式会社
無人搬送車
6日前
前川鉄工株式会社
ロープ駆動装置
5か月前
ナブテスコ株式会社
ホームドア装置
7か月前
ナブテスコ株式会社
ホームドア装置
6か月前
株式会社フジキカイ
リニア搬送装置
6か月前
日本製鉄株式会社
鉄道車両
1か月前
日本製鉄株式会社
鉄道車両
1か月前
日本車輌製造株式会社
長尺用無人搬送台車
6か月前
ナブテスコ株式会社
ホームドア装置
7か月前
ナブテスコ株式会社
ホームドア装置
7か月前
株式会社京三製作所
車上装置
28日前
日本信号株式会社
列車制御システム
8か月前
株式会社 空スペース
跨座式モノレールシステム
3か月前
富士電機株式会社
制御装置、制御方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ