TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025037084
公報種別
公開特許公報(A)
公開日
2025-03-17
出願番号
2023143825
出願日
2023-09-05
発明の名称
走行制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B60W
30/14 20060101AFI20250310BHJP(車両一般)
要約
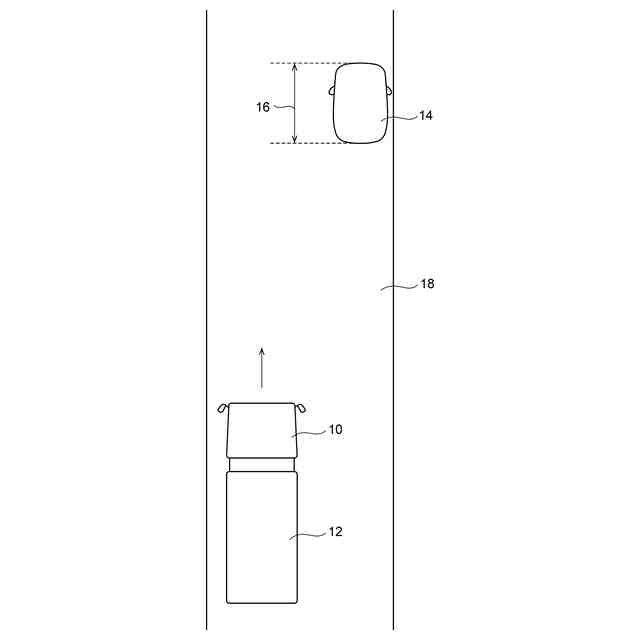
【課題】牽引車両が自動運転制御によって低速走行区間を低速走行する場合に、被牽引車両の有無に応じて低速走行区間を適切に低速走行できる走行制御装置を提供する。
【解決手段】走行制御装置は、牽引車両10を所定の低速以下で走行させる低速走行区間16が牽引車両10の進行方向に存在することを検出する区間検出部と、牽引車両10を自動で走行させる自動運転制御を実行し、検出された低速走行区間16を牽引車両10が自動運転制御で通過する際に牽引車両10を所定の低速以下で走行させる走行制御部と、を備える。走行制御部は、牽引車両10が被牽引車両12を牽引している場合に、牽引車両10が被牽引車両12を牽引していない場合よりも、低速走行区間で低速走行する距離を長くする。
【選択図】図1
特許請求の範囲
【請求項1】
被牽引車両を牽引する牽引車両を自動で走行させる制御を実行する走行制御装置であって、
前記牽引車両を所定の低速以下で走行させる低速走行区間が前記牽引車両の進行方向に存在することを検出する区間検出部と、
前記牽引車両を自動で走行させる自動運転制御を実行し、検出された低速走行区間を前記牽引車両が自動運転制御で通過する際に前記牽引車両を所定の低速以下で走行させる走行制御部と、を備え、
前記走行制御部は、前記牽引車両が前記被牽引車両を牽引している場合に、前記牽引車両が前記被牽引車両を牽引していない場合よりも、低速走行区間で低速走行する距離を長くすることを特徴とする走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転者の運転を支援する走行制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、障害物検出装置から入力された検出情報に基づいて、自律的に移動するように制御する制御装置が開示されている。この制御装置は、自車両が狭路に進入したと判定された場合に、車幅方向両側に形成された各壁部の自車両から狭路の出口端までの壁長さが、所定の閾値よりも長いと判定された場合には、通常速度で走行し、各壁長さが、所定の閾値以下であると判定された場合には、減速して所定の徐行速度で走行するように制御する。
【先行技術文献】
【特許文献】
【0003】
特開2020-042419号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示される技術では、狭路を形成する両側の壁の長さによって狭路の走行が続くか狭路を出るか判定し、自車両が狭路を出る際に減速する。車両が牽引車両である場合には、被牽引車両の有無によって車両全長が変わり、車両全体が狭路を出るタイミングが異なる。
【0005】
本発明の目的は、牽引車両が自動運転制御によって低速走行区間を低速走行する場合に、被牽引車両の有無に応じて低速走行区間を適切に低速走行できる走行制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様は、被牽引車両を牽引する牽引車両を自動で走行させる制御を実行する走行制御装置であって、牽引車両を所定の低速以下で走行させる低速走行区間が牽引車両の進行方向に存在することを検出する区間検出部と、牽引車両を自動で走行させる自動運転制御を実行し、検出された低速走行区間を牽引車両が自動運転制御で通過する際に牽引車両を所定の低速以下で走行させる走行制御部と、を備える。走行制御部は、牽引車両が被牽引車両を牽引している場合に、牽引車両が被牽引車両を牽引していない場合よりも、低速走行区間で低速走行する距離を長くする。
【発明の効果】
【0007】
本発明によれば、牽引車両が自動運転制御によって低速走行区間を低速走行する場合に、被牽引車両の有無に応じて低速走行区間を適切に低速走行できる走行制御装置を提供できる。
【図面の簡単な説明】
【0008】
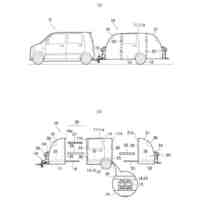
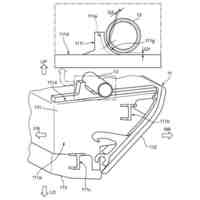
自動運転制御において低速走行をする状況について説明するための図である。
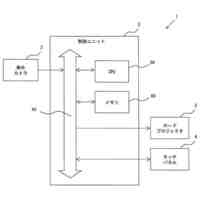
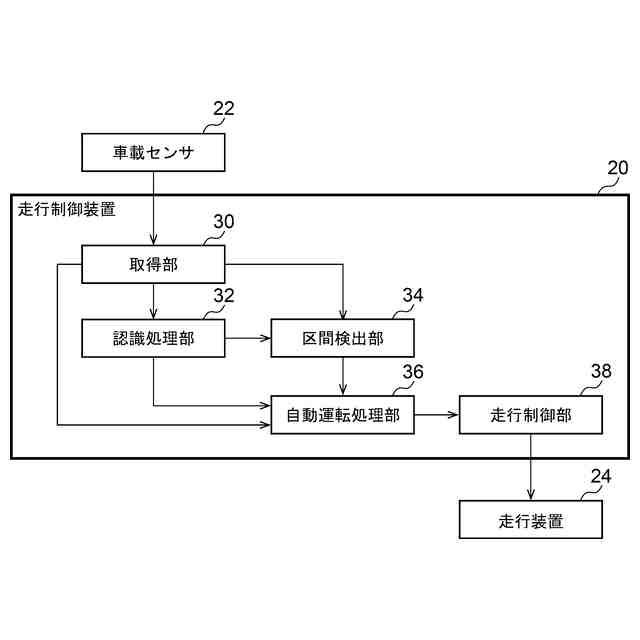
牽引車両に搭載された走行制御装置の機能構成を示す図である。
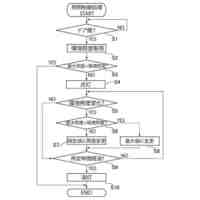
牽引車両が低速走行区間を走行する自動運転制御のフローチャートである。
【発明を実施するための形態】
【0009】
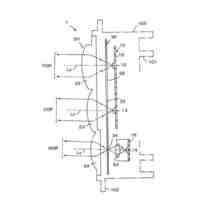
図1は、自動運転制御において低速走行をする状況について説明するための図である。図1には、牽引車両10が被牽引車両12を牽引して車道18を走行している様子を示す。牽引車両10は、自律的に走行させる自動運転機能として、例えばクルーズコントロール、追従制御などを実行可能である。追従制御では、牽引車両10は先行車両から所定間隔だけ離れて先行車両を追従し、先行車両の車速に合わせて走行する。クルーズコントロールでは、牽引車両10は設定された速度で、設定された走行経路を自動で走行する。
【0010】
停止車両14が車道18の右側に寄せており、牽引車両10の進行方向に存在している。車道18の幅は狭いため、牽引車両10は、停止車両14の横を通る際に、低速で走行すべきである。牽引車両10は、自動運転制御を実行中に、道幅の狭い道路で停止車両14などの障害物を検出すると、停止車両14の横を通過する間を低速で走行する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
28日前
個人
眼科手術車
2か月前
個人
授乳用車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
3か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
4日前
日本精機株式会社
表示装置
5日前
日本精機株式会社
表示装置
5日前
日本精機株式会社
表示装置
5日前
日本精機株式会社
照明装置
4日前
個人
キャンピングトレーラー
3か月前
個人
台車用車輪止め具
2か月前
株式会社松華
懸架装置
4日前
日本精機株式会社
車載表示装置
2か月前
個人
謝意シグナル装着車
2か月前
個人
ステージカー
4日前
個人
自走式立体型洗車場
今日
株式会社青木製作所
タンクローリ
2か月前
マツダ株式会社
車両
10日前
日本精機株式会社
車両用照明装置
1か月前
日本精機株式会社
車両用表示装置
2か月前
マツダ株式会社
車両
10日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
5日前
マツダ株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
5日前
日本精機株式会社
車両用表示装置
4日前
トヨタ自動車株式会社
車両
2か月前
コイト電工株式会社
座席装置
4日前
東レ株式会社
車両用部材の補強方法
3か月前
株式会社小糸製作所
投影装置
1か月前
株式会社SUBARU
保護構造
1か月前
豊田合成株式会社
乗員保護装置
1か月前
個人
Aピラー死角エリヤ確認用ミラー
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ