TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025034093
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023140259
出願日
2023-08-30
発明の名称
自動運転車両の開発方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B60W
50/06 20060101AFI20250306BHJP(車両一般)
要約
【課題】数、種類、検知性能の少なくとも一つが第一のセンサ仕様と比べて劣る第二のセンサ仕様を有する第二の自動運転車両を第一の自動運転車両とは別に適合しなおす手間を低減する。
【解決手段】自動運転システムは、外部環境を認識する認識処理、経路計画を行う計画処理、及び、自動運転制御を行う車両制御処理のうち、少なくとも認識処理及び計画処理について、機械学習モデルが適用されている。自動運転車両の開発方法は、第一のセンサ仕様の外部センサを備える第一の自動運転車両を用いて、少なくとも認識処理及び計画処理の適合を行うことで機械学習モデルのトレーニングを行う第一ステップと、数、種類、検知性能の少なくとも一つが第一のセンサ仕様と比べて劣る第二のセンサ仕様の外部センサを備える第二の自動運転車両に対して、第一ステップで行ったトレーニング済みの機械学習モデルを適用する第二ステップと、を備える。
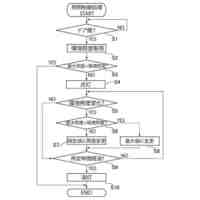
【選択図】図3
特許請求の範囲
【請求項1】
センサ仕様として数、種類、検知性能を含む外部センサを備える自動運転車両の開発方法であって、
前記自動運転車両は、前記外部センサの検出結果に基づいて外部環境を認識する認識処理、前記認識処理の結果を用いて経路計画を行う計画処理、及び、計画した前記経路に基づいて自動運転制御を行う車両制御処理のうち、少なくとも前記認識処理及び前記計画処理について、前記外部センサの検出結果を入力として前記経路を出力する機械学習モデルが適用された自動運転システムを備えており、
第一の前記センサ仕様の前記外部センサを備える第一の前記自動運転車両を用いて、少なくとも前記認識処理及び前記計画処理の適合を行うことで前記機械学習モデルのトレーニングを行う第一ステップと、
数、種類、検知性能の少なくとも一つが第一の前記センサ仕様と比べて劣る第二の前記センサ仕様の前記外部センサを備える第二の前記自動運転車両に対して、前記第一ステップで行ったトレーニング済みの前記機械学習モデルを適用する第二ステップと、を備える、自動運転車両の開発方法。
続きを表示(約 210 文字)
【請求項2】
前記自動運転システムは、前記認識処理、前記計画処理、及び前記車両制御処理について、前記外部センサの検出結果を入力として前記自動運転制御の制御量を出力する前記機械学習モデルが適用されており、
前記第一ステップにおいて、第一の前記自動運転車両を用いて、前記認識処理、前記計画処理、及び前記車両制御処理の適合を行うことで前記機械学習モデルのトレーニングを行う、請求項1に記載の自動運転車両の開発方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動運転車両の開発方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1に記載の検出システムは、畳み込みニューラルネットワークの形式である解析モジュールを有する。カメラからの画像及びセンサ装置からのセンサデータは、解析モジュールの入力データとして使用され、検出システムでリアルタイムで解析される。解析の結果として、例えば、第二の自動車の前を走る第一の自動車の車体の運動から第二の自動車の安全レベルが指し示され、安全レベルに応じて第二の自動車のユーザインターフェース上に光学的及び/又は音響的警報が出力される。
【先行技術文献】
【特許文献】
【0003】
特開2022-082510号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
外部センサの検出結果に基づいて外部環境を認識して経路計画を行い、計画した経路に基づいて自動運転制御を行う自動運転車両において、経路計画への入力データは、例えば、外部センサの数、種類、検知性能に応じて変化する。そのため、従来、外部センサの構成が異なる自動運転車両同士では経路計画の適合結果を単純に流用できず、異なる入力データに合わせて経路計画を別々に適合しなおす必要があり、膨大な開発工数を要していた。
【0005】
本発明は、数、種類、検知性能の少なくとも一つが第一のセンサ仕様と比べて劣る第二のセンサ仕様を有する第二の自動運転車両を第一の自動運転車両とは別に適合しなおす手間を低減することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様は、センサ仕様として数、種類、検知性能を含む外部センサを備える自動運転車両の開発方法であって、自動運転車両は、外部センサの検出結果に基づいて外部環境を認識する認識処理、認識処理の結果を用いて経路計画を行う計画処理、及び、計画した経路に基づいて自動運転制御を行う車両制御処理のうち、少なくとも認識処理及び計画処理について、外部センサの検出結果を入力として経路を出力する機械学習モデルが適用された自動運転システムを備えており、第一のセンサ仕様の外部センサを備える第一の自動運転車両を用いて、少なくとも認識処理及び計画処理の適合を行うことで機械学習モデルのトレーニングを行う第一ステップと、数、種類、検知性能の少なくとも一つが第一のセンサ仕様と比べて劣る第二のセンサ仕様の外部センサを備える第二の自動運転車両に対して、第一ステップで行ったトレーニング済みの機械学習モデルを適用する第二ステップと、を備える。
【0007】
本発明の一態様に係る自動運転車両の開発方法では、第一ステップにおいて、第二の自動運転車両より優れたセンサ仕様を有する第一の自動運転車両を用いて、機械学習モデルのトレーニングが行われる。第二ステップにおいて、第一の自動運転車両でトレーニング済みの機械学習モデルを第二の自動運転車両に対して適用する。これにより、第二の自動運転車両において、トレーニング済みの機械学習モデルを用いて、第一の自動運転車両と同等の経路を出力することができる。したがって、数、種類、検知性能の少なくとも一つが第一のセンサ仕様と比べて劣る第二のセンサ仕様を有する第二の自動運転車両を第一の自動運転車両とは別に適合しなおす手間を低減することが可能となる。
【0008】
一実施形態に係る自動運転車両の開発方法において、自動運転システムは、認識処理、計画処理、及び車両制御処理について、外部センサの検出結果を入力として自動運転制御の制御量を出力する機械学習モデルが適用されており、第一ステップにおいて、第一の自動運転車両を用いて、認識処理、計画処理、及び車両制御処理の適合を行うことで機械学習モデルのトレーニングを行ってもよい。この場合、車両制御処理も含む機械学習モデルは、第一の自動運転車両でトレーニングを済ませて第二の自動運転車両に対して適用される。これにより、第二の自動運転車両において、トレーニング済みの機械学習モデルを用いて、第一の自動運転車両と同等の自動運転制御の制御量を出力することができる。
【発明の効果】
【0009】
本発明によれば、数、種類、検知性能の少なくとも一つが第一のセンサ仕様と比べて劣る第二のセンサ仕様を有する第二の自動運転車両を第一の自動運転車両とは別に適合しなおす手間を低減することが可能となる。
【図面の簡単な説明】
【0010】
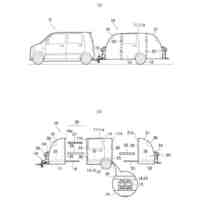
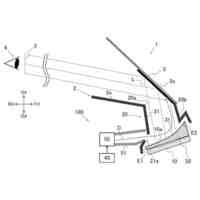
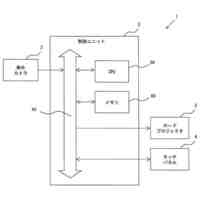
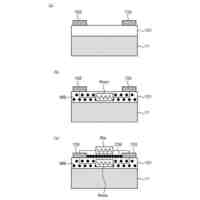
実施形態に係る自動運転車両の開発方法において機械学習モデルのトレーニングに用いられる自動運転車両を例示するブロック図である。
実施形態に係る自動運転車両の開発方法においてトレーニング済みの機械学習モデルを適用される自動運転車両を例示するブロック図である。
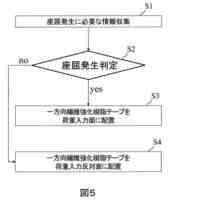
実施形態に係る自動運転車両の開発方法の手順を例示するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
24日前
個人
眼科手術車
2か月前
個人
授乳用車両
1か月前
井関農機株式会社
作業車両
3か月前
日本精機株式会社
表示装置
1日前
日本精機株式会社
表示装置
1日前
日本精機株式会社
表示装置
1日前
日本精機株式会社
照明装置
今日
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
今日
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
2か月前
株式会社松華
懸架装置
今日
個人
台車用車輪止め具
2か月前
個人
キャンピングトレーラー
2か月前
個人
謝意シグナル装着車
2か月前
日本精機株式会社
車載表示装置
2か月前
個人
ステージカー
今日
日本精機株式会社
車両用表示装置
1日前
日本精機株式会社
車両用表示装置
1日前
日本精機株式会社
車両用照明装置
28日前
マツダ株式会社
車両
6日前
トヨタ自動車株式会社
車両
2か月前
マツダ株式会社
車両
6日前
日本精機株式会社
車両用表示装置
3か月前
マツダ株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
1か月前
株式会社青木製作所
タンクローリ
2か月前
日本精機株式会社
車両用表示装置
今日
コイト電工株式会社
座席装置
今日
東レ株式会社
車両用部材の補強方法
3か月前
株式会社小糸製作所
投影装置
1か月前
個人
Aピラー死角エリヤ確認用ミラー
6日前
個人
タイヤ洗浄装置の軸受構造
2か月前
バルミューダ株式会社
電動車両
28日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ