TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025029605
公報種別
公開特許公報(A)
公開日
2025-03-06
出願番号
2024155126,2023133993
出願日
2024-09-09,2023-08-21
発明の名称
通信制御方法及びノード
出願人
京セラ株式会社
代理人
弁理士法人キュリーズ
主分類
H04W
36/08 20090101AFI20250227BHJP(電気通信技術)
要約
【課題】ユーザ装置がサービス種別に応じた最適なセルへハンドオーバすることが可能な通信制御方法及びノードを提供する。
【解決手段】通信制御方法は、ノード(gNB)が、ネットワークスライスに関するネットワークスライス情報及びサービスの品質を表すサービス品質情報の少なくともいずれかを含む第1メッセージを、コアネットワーク装置(AMF)から受信するステップと、測定報告をユーザ装置(UE)から受信するステップと、測定報告を受信したことに応じて、ネットワークスライス情報及びサービス品質情報の少なくともいずれかに基づき、ハンドオーバ実行有無の判定に用いる閾値を決定するステップと、測定報告に含まれる受信品質を表す受信品質値と閾値とに基づいて、ユーザ装置をハンドオーバさせるかどうかを決定するステップを有する。
【選択図】図7
特許請求の範囲
【請求項1】
移動通信システムにおける通信制御方法であって、
ノードが、ネットワークスライスに関するネットワークスライス情報及びサービスの品質を表すサービス品質情報の少なくともいずれかを含む第1メッセージを、コアネットワーク装置から受信するステップと、
前記ノードが、測定報告をユーザ装置から受信するステップと、
前記ノードが、前記測定報告を受信したことに応じて、前記ネットワークスライス情報及び前記サービス品質情報の少なくともいずれかに基づき、ハンドオーバ決定に用いる閾値を決定するステップと、
前記ノードが、前記測定報告に含まれる受信品質を表す受信品質値と前記閾値とに基づいて、前記ユーザ装置をハンドオーバさせるかどうかを決定するステップと、を有する
通信制御方法。
続きを表示(約 1,200 文字)
【請求項2】
前記ネットワークスライス情報は、前記ネットワークスライスを識別するネットワークスライス識別子である
請求項1記載の通信制御方法。
【請求項3】
前記ネットワークスライス情報は、前記ネットワークスライス識別子に含まれ、前記ネットワークスライスに対応付けられるサービス種別を表すサービス種別情報である
請求項2記載の通信制御方法。
【請求項4】
前記サービス品質情報は、QoS特性を識別するQoS識別子である
請求項1記載の通信制御方法。
【請求項5】
前記第1メッセージには、前記ユーザ装置を識別するユーザ装置識別子が含まれ、
前記ノードが、前記第1メッセージに基づいて、前記ユーザ装置識別子と前記ネットワークスライス情報とを関連付けること、及び前記ユーザ装置識別子と前記サービス品質情報とを関連付けることの少なくともいずれかを行うステップを、更に有する
請求項1記載の通信制御方法。
【請求項6】
前記閾値を決定するステップは、前記ノードが、前記ネットワークスライス情報及び前記サービス品質情報の少なくともいずれかに対応する通信特性に基づいて、前記閾値を決定するステップを含む
請求項1記載の通信制御方法。
【請求項7】
前記閾値を決定するステップは、前記ノードが、前記通信特性として、第1受信品質よりも高い第2受信品質が要求された場合、前記閾値を第1閾値よりも高い第2閾値に変更するステップを含む
請求項6記載の通信制御方法。
【請求項8】
前記閾値を決定するステップは、前記ノードが、前記ネットワークスライスに対応する前記通信特性として、第1変動幅より少ない変動幅の周波数帯域が要求された場合、前記閾値として、RSRPに関するRSRP閾値と、SINRに関するSINR閾値とを、決定するステップを含む
請求項6記載の通信制御方法。
【請求項9】
前記ノードが、前記通信特性に基づいて、前記測定報告を送信するタイミングを示すタイミング情報を含む第2メッセージを前記ユーザ装置へ送信するステップと、
前記ユーザ装置が、前記第2メッセージを受信するステップと、
前記ユーザ装置が、前記タイミング情報に従って、前記測定報告を送信するステップと、を更に含む
請求項6記載の通信制御方法。
【請求項10】
前記閾値を決定するステップは、前記ノードが、前記ネットワークスライス情報、前記サービス品質情報、前記ユーザ装置の接続状態、及び前記ユーザ装置の過去のハンドオーバの統計情報の少なくともいずれかに基づいて前記閾値を決定するステップを含む
請求項1記載の通信制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、通信制御方法及びノードに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
RRCコネクティッド状態のユーザ装置(UE:User Equipment)に適用される移動制御の1つにハンドオーバがある。ハンドオーバとは、ユーザ装置が接続先のセルを切り替える技術のことである。ユーザ装置は、ノードから提供される設定情報(MeasConfig)に従って、受信品質を測定し、受信品質を含む測定報告(MeasurementReport)をノードへ送信する。ノードは、測定報告に基づいてハンドオーバの実行を決定し、ユーザ装置に対してハンドオーバを指示する。ハンドオーバにより、例えば、ユーザ装置は、最適なセルとの間で無線通信が可能となる。
【0003】
一方、移動通信システムでは、ネットワークスライシングが導入されている。ネットワークスライシングは、事業者が構築した物理的なネットワークを仮想的に分割することにより複数の仮想ネットワークを作成する技術である。各仮想ネットワークは、ネットワークスライスと呼ばれる。ネットワークスライシングにより、通信事業者は、例えば、eMBB(enhanced Mobile Broadband)、URLLC(Ultra-Reliable and Low Latency Communications)、mMTC(massive Machine Type Communications)等の異なるサービス種別のサービス要件に応じたスライスを作成することができる。ネットワークスライシングにより、例えば、ネットワークリソースの最適化を図ることができる。
【先行技術文献】
【非特許文献】
【0004】
3GPP TS 38.300 V17.4.0 (2023-03)
3GPP TS 38.401 V17.5.0 (2023-06)
3GPP TS 23.501 V17.9.0 (2023-06)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ノードでは、ネットワークスライスに対応するサービス種別とは無関係に、測定報告に含まれる受信品質に基づいてハンドオーバ決定が行われる。そのため、ユーザ装置は、サービス種別に応じた最適なセルへハンドオーバすることができない場合がある。
【0006】
そこで、本開示は、ユーザ装置がサービス種別に応じた最適なセルへハンドオーバすることが可能な通信制御方法及びノードを提供することを目的とする。
【課題を解決するための手段】
【0007】
一態様に係る通信制御方法は移動通信システムにおける通信制御方法である。前記通信制御方法は、ノードが、ネットワークスライスに関するネットワークスライス情報及びサービスの品質を表すサービス品質情報の少なくともいずれかを含む第1メッセージを、コアネットワーク装置から受信するステップを有する。また、前記通信制御方法は、ノードが、測定報告をユーザ装置から受信するステップを有する。更に、前記通信制御方法は、ノードが、測定報告を受信したことに応じて、ネットワークスライス情報及びサービス品質情報の少なくともいずれかに基づき、ハンドオーバ実行有無の判定に用いる閾値を決定するステップを有する。更に、前記通信制御方法は、ノードが、測定報告に含まれる受信品質を表す受信品質値と閾値とに基づいて、ユーザ装置をハンドオーバさせるかどうかを決定するステップを有する。
【0008】
また、一態様に係るノードは、ユーザ装置及びコアネットワーク装置と通信が可能なノードである。前記ノードは、ネットワークスライスに関するネットワークスライス情報及びサービスの品質を表すサービス品質情報の少なくともいずれかを含む第1メッセージをコアネットワーク装置から受信するとともに、測定報告をユーザ装置から受信する受信部を有する。また、前記ノードは、測定報告を受信したことに応じて、ネットワークスライス情報及びサービス品質情報の少なくともいずれかに基づき、ハンドオーバ決定に用いる閾値を決定する制御部を有する。制御部は、測定報告に含まれる受信品質を表す受信品質値と閾値とに基づいて、ユーザ装置をハンドオーバさせるかどうかを決定する。
【発明の効果】
【0009】
本開示によれば、ユーザ装置がサービス種別に応じた最適なセルへハンドオーバすることが可能な通信制御方法及びノードを提供できる。
【図面の簡単な説明】
【0010】
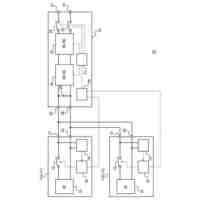
図1は、第1実施形態に係る移動通信システムの構成例を表す図である。
図2は、第1実施形態に係るUE(ユーザ装置)の構成例を表す図である。
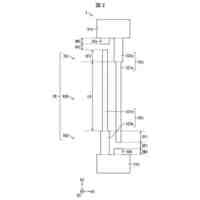
図3は、第1実施形態に係るgNB(ノード)の構成例を表す図である。
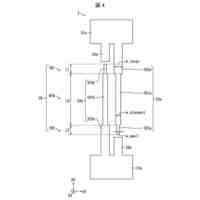
図4は、第1実施形態に係るAMFの構成例を示す図である。
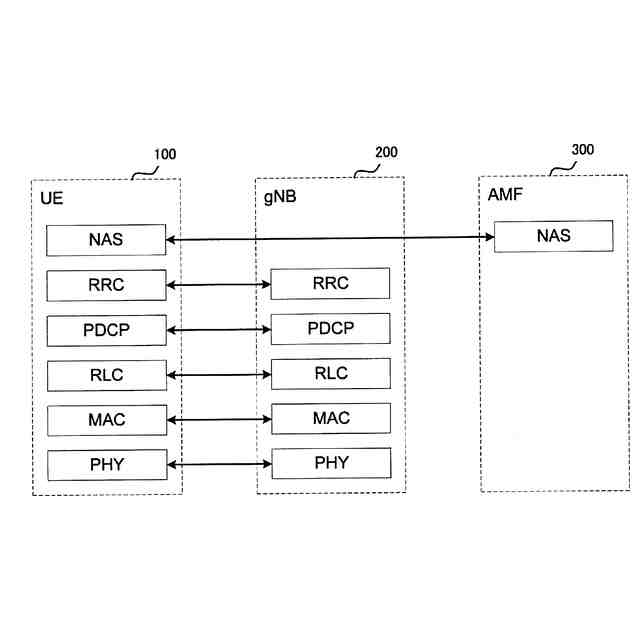
図5は、第1実施形態に係るユーザプレーンのプロトコルスタックの構成例を表す図である。
図6は、第1実施形態に係る制御プレーンのプロトコルスタックの構成例を表す図である。
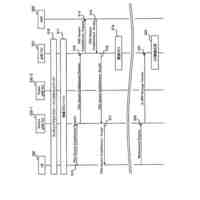
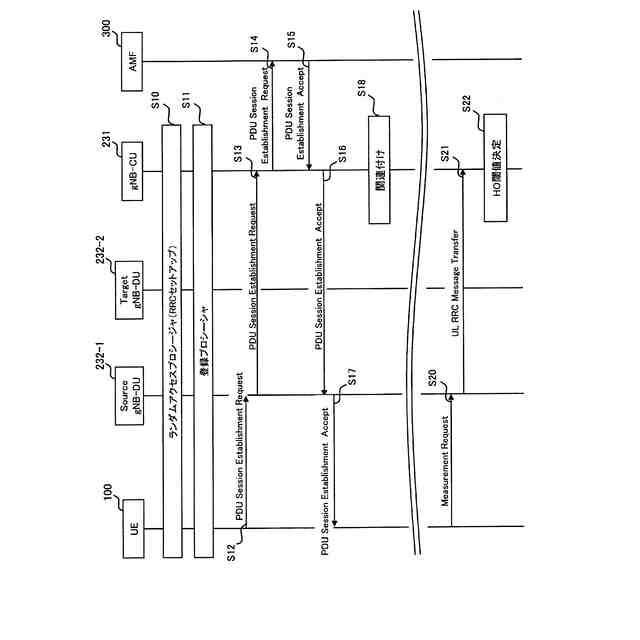
図7は、第1実施形態に係る動作例を表す図である。
図8(A)は第1実施形態に係る関連付けの例を表し、図8(B)は第2実施形態に係る関連付けの例を表す図である。
図9は、第1実施形態に係る動作例を表す図である。
図10(A)は第1実施形態に係るUEコンテキスト変更要求メッセージに含まれる情報要素の例を表し、図10(B)は第1実施形態に係る「CU to DU RRC information」に含まれる情報要素の例を表す図である。
図11は、第1実施形態に係る5QIの例を表す図である。
図12は、第2実施形態に係る動作例を表す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
京セラ株式会社
保持具
2日前
京セラ株式会社
照明装置
6日前
京セラ株式会社
半導体素子
16日前
京セラ株式会社
弾性波フィルタ
1か月前
京セラ株式会社
通信制御方法及びノード
3日前
京セラ株式会社
弾性波装置および通信装置
2日前
京セラ株式会社
弾性波装置および通信装置
2日前
京セラ株式会社
弾性波デバイスおよび通信装置
16日前
京セラ株式会社
回転工具及び切削加工物の製造方法
2日前
京セラ株式会社
太陽電池装置及び太陽電池システム。
6日前
京セラ株式会社
配線基板およびそれを用いた実装構造体
1か月前
京セラ株式会社
検出方法、試薬キット、試薬の製造方法
16日前
京セラ株式会社
配線基板、電子装置及び電子モジュール
24日前
京セラ株式会社
配線基板、電子装置及び電子モジュール
24日前
京セラ株式会社
画像処理装置、撮像装置、及び算出方法
2日前
京セラ株式会社
照明システムおよび照明システムの制御方法
1か月前
京セラ株式会社
電子機器、電子機器の制御方法、及びプログラム
16日前
京セラ株式会社
情報処理装置、情報処理方法及び情報処理プログラム
2日前
京セラ株式会社
情報処理装置、情報処理方法及び情報処理プログラム
2日前
京セラ株式会社
ヒータ
2日前
京セラ株式会社
印刷装置
9日前
京セラ株式会社
分散電源制御システム、電源制御装置及び分散電源制御方法
2日前
京セラ株式会社
蓄電システム、パワーコンディショナ、及び蓄電池ユニット
24日前
京セラ株式会社
熱デバイス
16日前
京セラ株式会社
分散電源制御システム、電源制御装置及び分散電源制御方法
2日前
京セラ株式会社
画像処理装置
25日前
京セラ株式会社
通信制御方法
25日前
京セラ株式会社
装置及び方法
1か月前
京セラ株式会社
プラグおよびこれを備えた電子部品収納用パッケージ、電子モジュール
1か月前
京セラ株式会社
印刷装置及び印刷方法
4日前
京セラ株式会社
回路基板および電子装置
1か月前
京セラ株式会社
通信制御方法及びノード
3日前
京セラ株式会社
電気化学セル、電気化学セル装置、モジュールおよびモジュール収容装置
24日前
京セラ株式会社
電気化学セル、電気化学セル装置、モジュールおよびモジュール収容装置
24日前
京セラ株式会社
光照射装置および印刷装置
9日前
京セラ株式会社
虚像表示装置および移動体
24日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ