TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025030451
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023135749
出願日
2023-08-23
発明の名称
画像処理装置、撮像装置、及び算出方法
出願人
京セラ株式会社
代理人
個人
,
個人
,
個人
主分類
G06T
7/593 20170101AFI20250228BHJP(計算;計数)
要約
【課題】広角の画像に対して演算量を抑えながら距離の測定精度を向上させる画像処理装置、撮像装置および算出方法を提供する。
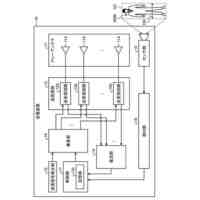
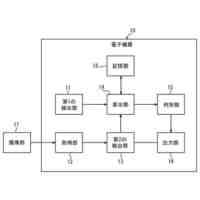
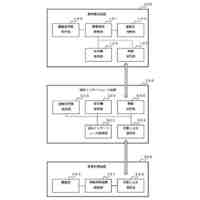
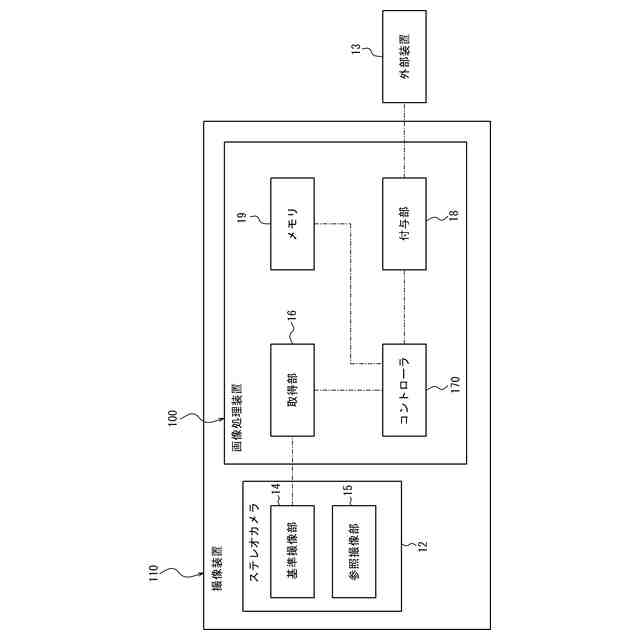
【解決手段】撮像装置11において、画像処理装置10は、取得部16とコントローラ17とを有する。取得部16は、基準画像及び参照画像を取得する。コントローラ17は、基準画像及び参照画像を用いてパッチマッチ法により被写体までの距離を算出し、パッチマッチ法において仮定平面に基準画像の撮像に用いた光学系の歪特性を用いて第1の画素を射影変換する。第1の画素は基準画像中の画素である。コントローラ17はさらに、射影変換した第1の画素を参照画像に投影することにより第2の画素の位置を算出する。コントローラ17は、第1の画素及び第2の画素の相違度を算出する。
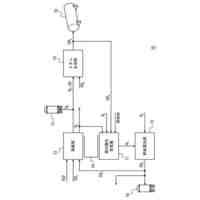
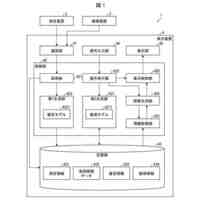
【選択図】図1
特許請求の範囲
【請求項1】
基準位置から撮像した基準画像、及び前記基準位置とは異なる位置から撮像した参照画像を取得する取得部と、
前記基準画像及び前記参照画像を用いてパッチマッチ法により、前記基準画像及び前記参照画像に像が含まれる被写体までの距離を算出するコントローラと、を備え、
前記コントローラは、前記パッチマッチ法において物点が存在すると仮定する仮定平面に、前記基準画像の撮像に用いた光学系の歪特性を用いて該基準画像中の第1の画素を射影変換し、射影変換した前記第1の画素を前記参照画像に投影することにより該第1の画素に該参照画像において対応する第2の画素の位置を算出し、前記第1の画素及び前記第2の画素の相違度を算出する
画像処理装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の画像処理装置において、
前記仮定平面は、前記基準画像を撮像する撮像部の光学系の光軸に対して垂直な直線から該光軸周りの第1の回転角及び該光軸からの第2の回転角によって定められる単位ベクトル、並びに前記光軸方向における奥行きにより規定される
画像処理装置。
【請求項3】
請求項1に記載の画像処理装置において、
前記コントローラは、前記相違度が判別閾値以下になるまで、前記パッチマッチ法における繰返し処理を行う
画像処理装置。
【請求項4】
請求項1から3のいずれか1項に記載の画像処理装置において、
前記パッチマッチ法における繰返し処理の繰返し回数には、上限値が定められている
画像処理装置。
【請求項5】
請求項1から3のいずれか1項に記載の画像処理装置において、
前記コントローラは、前記第1の画素及び前記第2の画素の相違度の算出に、該第1の画素の近傍画素を用いる
画像処理装置。
【請求項6】
請求項5に記載の画像処理装置において、
前記近傍画素は、前記第1の画素に対して所定の配置パターンに基づいて選択される
画像処理装置。
【請求項7】
請求項5に記載の画像処理装置において、
前記近傍画素は、前記第1の画素に対してランダムに選択される
画像処理装置。
【請求項8】
基準位置に位置し、基準画像を撮像する基準撮像部と、
前記基準位置とは異なる参照位置に位置し、参照画像を撮像する参照撮像部と、
前記基準画像及び前記参照画像を用いてパッチマッチ法により、前記基準画像及び前記参照画像に像が含まれる被写体までの距離を算出するコントローラと、を備え、
前記コントローラは、前記パッチマッチ法において物点が存在すると仮定する仮定平面に、前記基準画像の撮像に用いた光学系の歪特性を用いて該基準画像中の第1の画素を射影変換し、射影変換した前記第1の画素を前記参照画像に投影することにより該第1の画素に該参照画像において対応する第2の画素の位置を算出し、前記第1の画素及び前記第2の画素の相違度を算出する
撮像装置。
【請求項9】
基準位置から撮像した基準画像、及び前記基準位置とは異なる位置から撮像した参照画像を取得し、
前記基準画像及び前記参照画像を用いてパッチマッチ法により、前記基準画像及び前記参照画像に像が含まれる被写体までの距離を算出し、
前記パッチマッチ法において物点が存在すると仮定する仮定平面に、前記基準画像の撮像に用いた光学系の歪特性を用いて該基準画像中の第1の画素を射影変換し、射影変換した前記第1の画素を前記参照画像に投影することにより該第1の画素に該参照画像において対応する第2の画素の位置を算出し、前記第1の画素及び前記第2の画素の相違度を算出する
算出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像処理装置、撮像装置、及び算出方法に関するものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
視点の異なる位置で撮像した複数の画像を用いて、被写体までの距離を推定することが知られている。画像を用いた距離の推定方法として、プレーンスイープ法(特許文献1参照)やパッチマッチ法等が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2016-208204号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、プレーンスイープ法では、測定精度の向上のためには演算量を増加させる必要があるため、測定精度と処理速度とはトレードオフの関係となる。パッチマッチ法は、プレーンスイープ法に比べて演算量を抑えながら測定精度を向上可能である。ただし、パッチマッチ法では、光学歪の大きな画像に対しては高い精度で測定することが難しかった。それゆえ、広角の画像に対して演算量を抑えながら測定精度を向上させることが難しい。
【0005】
従って、上記のような従来技術の問題点に鑑みてなされた本開示の目的は、広角の画像に対して演算量を抑えながら距離の測定精度を向上させる画像処理装置、撮像装置、および算出方法を提供することにある。
【課題を解決するための手段】
【0006】
上述した諸課題を解決すべく、第1の観点による画像処理装置は、
基準位置から撮像した基準画像、及び前記基準位置とは異なる位置から撮像した参照画像を取得する取得部と、
前記基準画像及び前記参照画像を用いてパッチマッチ法により、前記基準画像及び前記参照画像に像が含まれる被写体までの距離を算出するコントローラと、を備え、
前記コントローラは、前記パッチマッチ法において物点が存在すると仮定する仮定平面に、前記基準画像の撮像に用いた光学系の歪特性を用いて該基準画像中の第1の画素を射影変換し、射影変換した前記第1の画素を前記参照画像に投影することにより該第1の画素に該参照画像において対応する第2の画素の位置を算出し、前記第1の画素及び前記第2の画素の相違度を算出する。
【0007】
また、第2の観点による撮像装置は、
基準位置に位置し、基準画像を撮像する基準撮像部と、
前記基準位置とは異なる参照位置に位置し、参照画像を撮像する参照撮像部と、
前記基準画像及び前記参照画像を用いてパッチマッチ法により、前記基準画像及び前記参照画像に像が含まれる被写体までの距離を算出するコントローラと、を備え、
前記コントローラは、前記パッチマッチ法において物点が存在すると仮定する仮定平面に、前記基準画像の撮像に用いた光学系の歪特性を用いて該基準画像中の第1の画素を射影変換し、射影変換した前記第1の画素を前記参照画像に投影することにより該第1の画素に該参照画像において対応する第2の画素の位置を算出し、前記第1の画素及び前記第2の画素の相違度を算出する。
【0008】
また、第3の観点による算出方法は、
基準位置から撮像した基準画像、及び前記基準位置とは異なる位置から撮像した参照画像を取得し、
前記基準画像及び前記参照画像を用いてパッチマッチ法により、前記基準画像及び前記参照画像に像が含まれる被写体までの距離を算出し、
前記パッチマッチ法において物点が存在すると仮定する仮定平面に、前記基準画像の撮像に用いた光学系の歪特性を用いて該基準画像中の第1の画素を射影変換し、射影変換した前記第1の画素を前記参照画像に投影することにより該第1の画素に該参照画像において対応する第2の画素の位置を算出し、前記第1の画素及び前記第2の画素の相違度を算出する。
【発明の効果】
【0009】
上記のように構成された本開示に係る画像処理装置、撮像装置、および算出方法によれば、広角の画像に対して演算量を抑えながら距離の測定精度が向上する。
【図面の簡単な説明】
【0010】
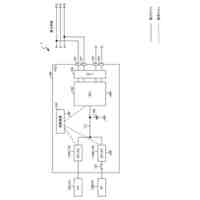
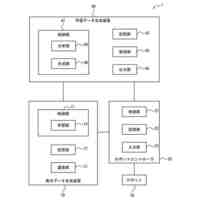
第1の実施形態に係る画像処理装置を含む撮像装置の概略構成を示すブロック図である。
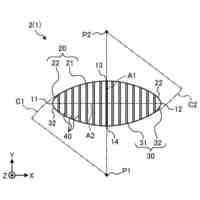
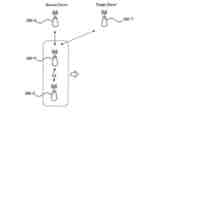
仮想平面の法線ベクトルの三次元座標系を説明するための図である。
図1のコントローラが実行する距離算出処理を説明するためのフローチャートである。
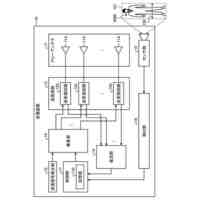
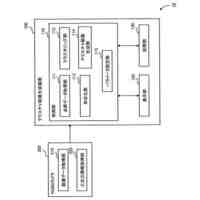
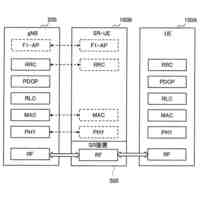
第2の実施形態に係る画像処理装置を含む撮像装置の概略構成を示すブロック図である。
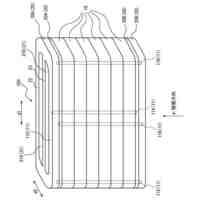
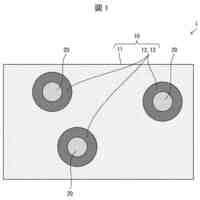
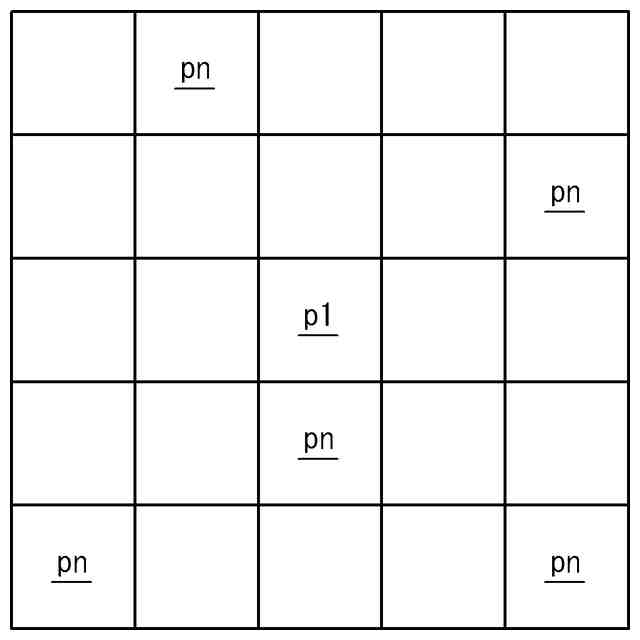
第2の実施形態の仮定平面の検証に用いる近傍画素の第1の画素に対する第1の配置パターンを示す図である。
第2の実施形態の仮定平面の検証に用いる近傍画素の第1の画素に対する第2の配置パターンを示す図である。
第2の実施形態の仮定平面の検証に用いる近傍画素の第1の画素に対する第3の配置パターンを示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
京セラ株式会社
ヒータ
10日前
京セラ株式会社
粒子分離装置
1日前
京セラ株式会社
粒子分離装置
1日前
京セラ株式会社
電力変換装置
8日前
京セラ株式会社
粒子分離装置
1日前
京セラ株式会社
粒子分離装置
1日前
京セラ株式会社
エネルギーシステム
1日前
京セラ株式会社
研磨治具および研磨装置
2日前
京セラ株式会社
送電装置、方法及びプログラム
3日前
京セラ株式会社
液滴吐出ヘッドおよび液滴吐出装置
1日前
京セラ株式会社
電源管理システム及び電源制御方法
2日前
京セラ株式会社
燃料電池モジュール及び燃料電池装置
1日前
京セラ株式会社
配線基板およびそれを用いた実装構造体
3日前
京セラ株式会社
送電装置、制御方法及び制御プログラム
2日前
京セラ株式会社
送電装置、制御方法及び制御プログラム
2日前
京セラ株式会社
燃料電池セルスタックおよび燃料電池装置
2日前
京セラ株式会社
透光性磁性材料、光学素子および光学装置
4日前
京セラ株式会社
電子機器、算出方法、及び算出プログラム
17日前
京セラ株式会社
ホルダ、切削工具及び切削加工物の製造方法
8日前
京セラ株式会社
ホルダ、切削工具及び切削加工物の製造方法
8日前
京セラ株式会社
二次電池用負極の製造方法、二次電池用負極および二次電池
2日前
京セラ株式会社
弾性波装置、分波器、通信装置および弾性波装置の製造方法
2日前
京セラ株式会社
学習データ生成装置、学習データ生成方法、及びプログラム
1日前
京セラ株式会社
テクスチャ画像生成装置、テクスチャ画像生成方法、及びテクスチャ画像生成プログラム
4日前
京セラ株式会社
結晶分析方法、結晶分析装置、半導体基板およびその製造方法、半導体デバイスの製造方法
14日前
京セラ株式会社
音処理方法、音処理装置及び音処理プログラム
1日前
京セラ株式会社
通信制御方法、第1ドナーネットワークノード及びセルラ通信システム
16日前
京セラ株式会社
通信方法、ユーザ装置、プロセッサ、プログラム、及び移動通信システム
1日前
京セラ株式会社
通信制御方法、中継ノード、通信システム、プログラム及びチップセット
16日前
京セラ株式会社
情報処理システム、情報処理方法、画像生成装置および画像生成プログラム
16日前
京セラ株式会社
通信制御方法、第1装置、ネットワークノード、チップセット、プログラム、及び移動通信システム
1日前
京セラ株式会社
通信制御方法、ネットワーク制御型リピータ、ネットワークノード、チップセット、プログラム、及び移動通信システム
16日前
KDDI株式会社
食べ方パターン分析システム、方法及びプログラム
2日前
キヤノン電子株式会社
通信システム
8日前
株式会社ザメディア
出席管理システム
2日前
トヨタ自動車株式会社
工程計画装置
2日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ