TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025060080
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170584
出願日
2023-09-29
発明の名称
学習データ生成装置、学習データ生成方法、及びプログラム
出願人
京セラ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20250403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】熟練していない操作者の操作に基づく学習によってもロボットの動作の精度を向上できる学習データ生成装置、学習データ生成方法及びプログラムを提供する。
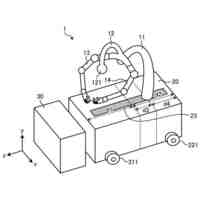
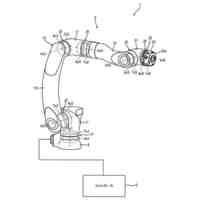
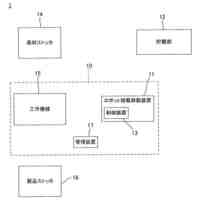
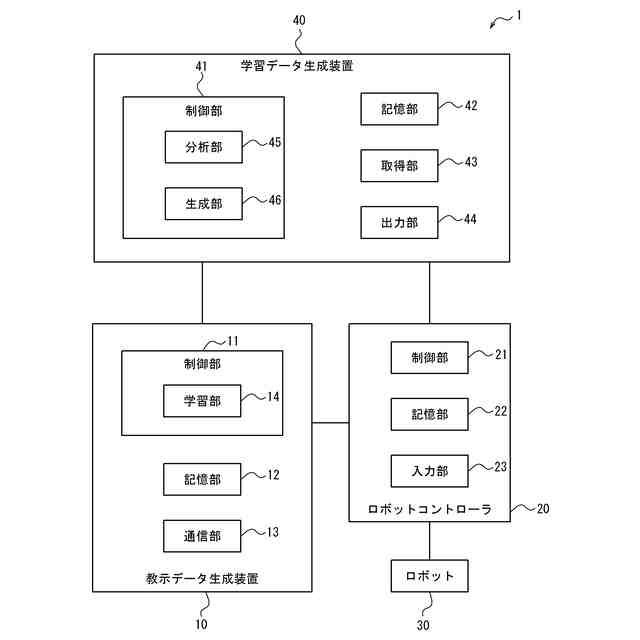
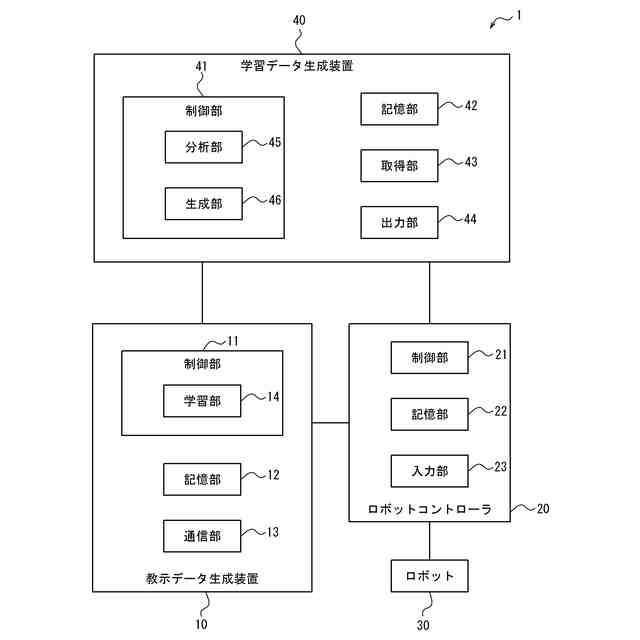
【解決手段】学習データ生成装置40は、ロボット30の模倣学習の学習データを生成する。学習データ生成装置40は、ロボット30を第1ユーザが操作したときの動作情報と、第2ユーザが動作情報を認識したときの反応とを取得する取得部43を備える。学習データ生成装置40は、第2ユーザの反応と動作情報とに基づいて学習データを生成する生成部46を備える。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットの模倣学習の学習データを生成する学習データ生成装置であって、
前記ロボットを第1ユーザが操作したときの動作情報と、第2ユーザが前記動作情報を認識したときの反応とを取得する取得部と、
前記第2ユーザの反応と前記動作情報とに基づいて前記学習データを生成する生成部と
を備える、学習データ生成装置。
続きを表示(約 1,000 文字)
【請求項2】
前記取得部は、前記ロボットを前記第1ユーザが操作したときの、前記ロボットの環境情報又は前記第1ユーザの状態情報の少なくとも一方を取得し、
前記生成部は、前記環境情報又は前記状態情報に更に基づいて前記学習データを生成する、請求項1に記載の学習データ生成装置。
【請求項3】
前記第2ユーザの反応を分析する分析部を更に備え、
前記分析部は、前記第2ユーザの反応に基づいて、前記動作情報のうち前記学習データに採用できる部分と前記学習データに採用できない部分とを判別し、
前記生成部は、前記学習データに採用できない部分を変更、置換又は削除することによって前記学習データを生成する、請求項1に記載の学習データ生成装置。
【請求項4】
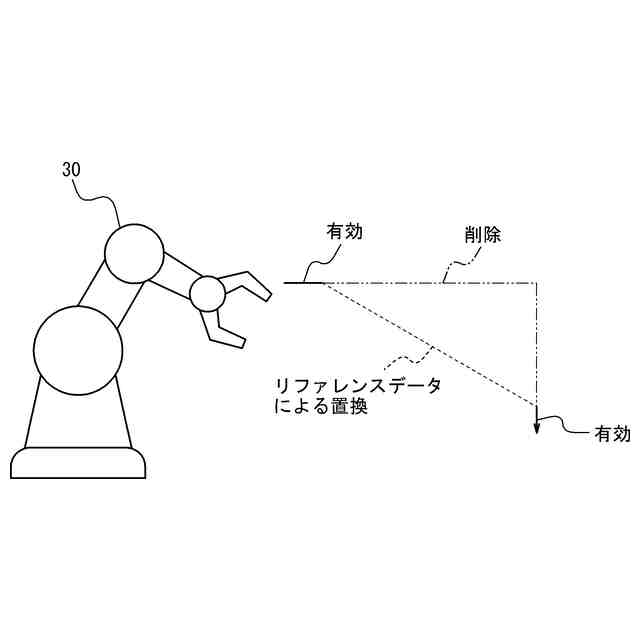
前記生成部は、前記学習データに採用できない部分を、前記第2ユーザが前記ロボットを操作した場合の前記ロボット30の動作の見本となるリファレンスデータによって置換する、請求項3に記載の学習データ生成装置。
【請求項5】
前記動作情報をVR環境で前記第2ユーザに視聴させる出力部を更に備える、請求項1から4までのいずれか一項に記載の学習データ生成装置。
【請求項6】
前記取得部は、前記第2ユーザの反応として、前記第2ユーザの視線を取得する、請求項5に記載の学習データ生成装置。
【請求項7】
前記取得部は、前記第2ユーザの反応として、前記第2ユーザの発話を取得する、請求項5に記載の学習データ生成装置。
【請求項8】
ロボットの模倣学習の学習データを生成する学習データ生成方法であって、
前記ロボットを第1ユーザが操作したときの動作情報と、第2ユーザが前記動作情報を認識したときの反応とを取得することと、
前記第2ユーザの反応と前記動作情報とに基づいて前記学習データを生成することと
を含む、学習データ生成方法。
【請求項9】
ロボットの動作を学習させる学習データ生成装置を作動させるプログラムであって、
前記学習データ生成装置に、前記ロボットを第1ユーザが操作したときの動作情報と、第2ユーザが前記動作情報を認識したときの反応とを取得させ、
前記第2ユーザの反応と前記動作情報とに基づいて前記学習データを生成させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、学習データ生成装置、学習データ生成方法、及びプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、ロボットの状態を指示する操作情報と、ロボットの状態に影響を与えない非操作情報とに基づいて、ロボットの操作を学習する装置が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2016/189924号
【発明の概要】
【発明が解決しようとする課題】
【0004】
熟練していない操作者の操作の精度は、熟練操作者の操作の精度よりも低い。非操作情報を参照したとしても、操作者が操作に熟練していない場合、当該操作に基づく学習によってロボットの動作の精度を高めることは難しい。
【0005】
本開示の目的は、熟練していない操作者の操作に基づく学習によってもロボットの動作の精度を向上できる学習データ生成装置、学習データ生成方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
本開示の一実施形態に係る学習データ生成装置は、
ロボットの模倣学習の学習データを生成する学習データ生成装置であって、
前記ロボットを第1ユーザが操作したときの動作情報と、第2ユーザが前記動作情報を認識したときの反応とを取得する取得部と、
前記第2ユーザの反応と前記動作情報とに基づいて前記学習データを生成する生成部と
を備える。
【0007】
本開示の一実施形態に係る学習データ生成方法は、
ロボットの模倣学習の学習データを生成する学習データ生成方法であって、
前記ロボットを第1ユーザが操作したときの動作情報と、第2ユーザが前記動作情報を認識したときの反応とを取得することと、
前記第2ユーザの反応と前記動作情報とに基づいて前記学習データを生成することと
を含む。
【0008】
本開示の一実施形態に係るプログラムは、
ロボットの動作を学習させる学習データ生成装置を作動させるプログラムであって、
前記学習データ生成装置に、前記ロボットを第1ユーザが操作したときの動作情報と、第2ユーザが前記動作情報を認識したときの反応とを取得させ、
前記第2ユーザの反応と前記動作情報とに基づいて前記学習データを生成させる。
【発明の効果】
【0009】
本開示の一実施形態に係る学習データ生成装置、学習データ生成方法、及びプログラムによれば、熟練していない操作者の操作に基づく学習によってもロボットの動作の精度が高められ得る。
【図面の簡単な説明】
【0010】
一実施形態に係るロボット制御システムの構成例を示すブロック図である。
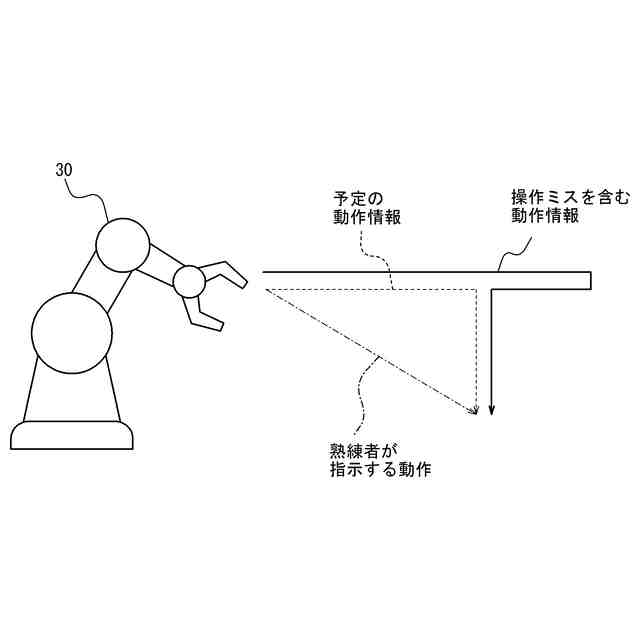
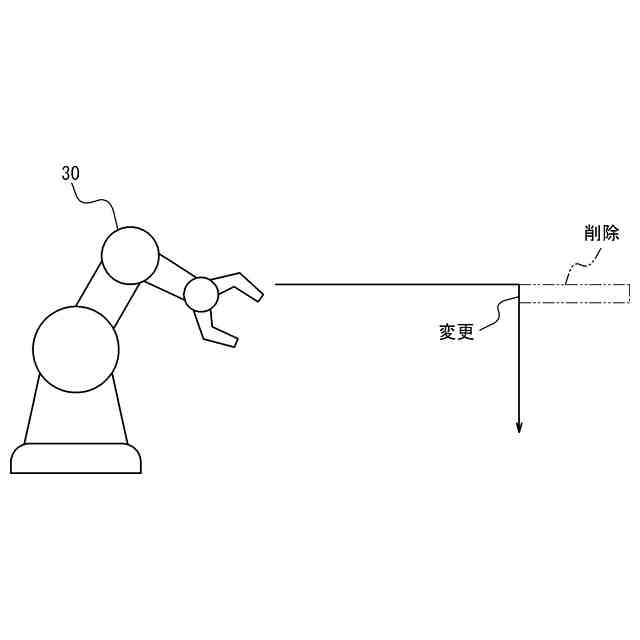
ロボットの動作情報の一例を示す図である。
図2Aの動作情報のうち、操作ミスの部分を削除して予定の動作情報に補正した例を示す図である。
図2Aの動作情報のうち、熟練者が指示する動作に適合しない部分を削除してリファレンスデータで置換した例を示す図である。
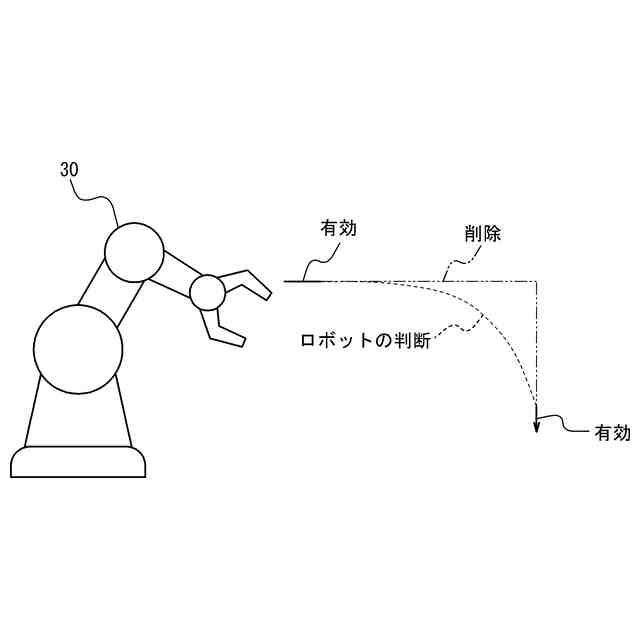
図2Aの動作情報のうち、熟練者が指示する動作に適合しない部分を削除して補間した例を示す図である。
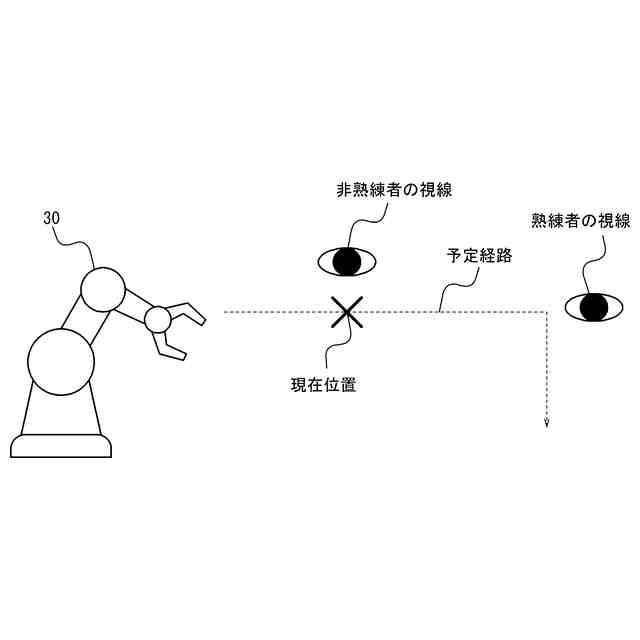
熟練者の視線と非熟練者の視線との違いの一例を示す図である。
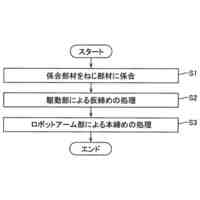
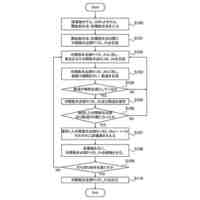
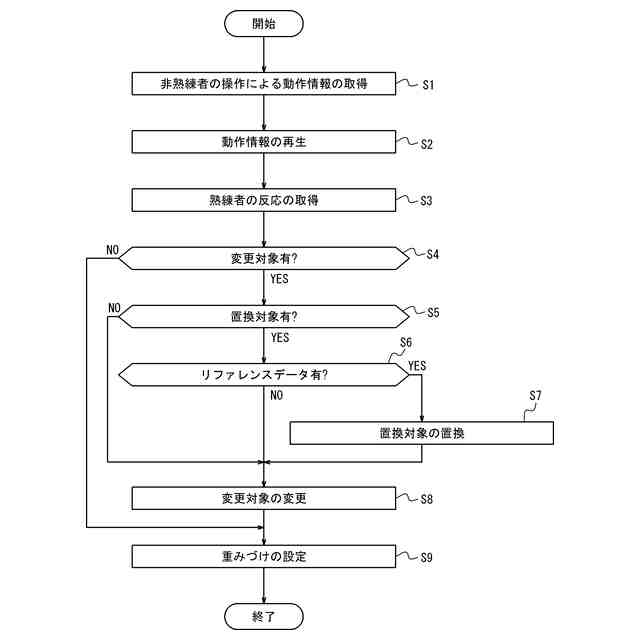
一実施形態に係る学習データ生成方法の手順例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社PILLAR
チューブ保持治具
3日前
個人
回転移動式工具ホルダ
5日前
ソフトバンクグループ株式会社
ロボット
3日前
TOPPANホールディングス株式会社
トング
6日前
川崎重工業株式会社
ロボットシステムおよびロボットシステムの制御方法
4日前
川崎重工業株式会社
ロボットシステムおよびロボットシステムの制御方法
4日前
株式会社安川電機
ロボットシステム、ロボット、ロボットの制御方法
6日前
株式会社スター精機
ワーク搬送装置、及びワーク搬送プログラム
6日前
京セラインダストリアルツールズ株式会社
電動工具
5日前
京セラインダストリアルツールズ株式会社
電動工具
5日前
DMG森精機株式会社
システム、ロボット搭載移動装置及びロボット搭載移動装置の動作の制御に用いられるプログラム
5日前
セイコーエプソン株式会社
ロボットのプロジェクトファイルを管理する方法、ロボット管理装置、及び、ロボットシステム
3日前
株式会社豊田中央研究所
制御装置及び制御システム
6日前
キヤノン株式会社
ロボットシステム、トルクセンサ、変位検出装置、検出方法、物品の製造方法、プログラム及び記録媒体
6日前
キヤノン株式会社
情報処理方法、情報処理装置、プログラム、記録媒体、生産システム、ロボットシステム、物品の製造方法
4日前
他の特許を見る
 特許ウォッチ
特許ウォッチ