TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025078663
公報種別
公開特許公報(A)
公開日
2025-05-20
出願番号
2025030055,2023002276
出願日
2025-02-27,2023-01-11
発明の名称
ワーク搬送装置、及びワーク搬送プログラム
出願人
株式会社スター精機
代理人
個人
主分類
B25J
15/06 20060101AFI20250513BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークに対して吸着部を適切に当接させることができるワーク搬送装置、及びワーク搬送プログラムを提供すること。
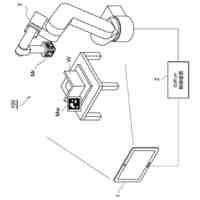
【解決手段】ワークを吸着して、吊り上げて前記ワークを搬送するワーク搬送装置10は、ハンド部20と、ハンド部20を移動させるサーボモータ91~93と、それらのサーボモータ91~93を制御する制御装置100と、を備える。ハンド部20は、ワークを吸着する吸着面を有する吸着パッドと、ワーク搬送装置10に接続される接続部と、接続部と吸着パッドの間に配置され、ワークWに対して吸着面を追従させるフローティング機構と、を備える。制御装置100は、Z軸サーボモータ93によりハンド部20を下降させ、ワークWに吸着面を当接させる際、ハンド部20に対して水平方向のうちいずれかの方向においてトルクを発生させないフリー状態を設定するようにサーボモータ91,92を制御する。
【選択図】 図1
特許請求の範囲
【請求項1】
液体、粉状体、又は粒状体が収容された袋体であるワークを吸着して、吊り上げて前記ワークを搬送するワーク搬送装置であって、
ロボットハンドと、
前記ロボットハンドを上下方向に移動させる第1駆動部と、
前記ロボットハンドを水平方向に移動又は回転させる第2駆動部と、
前記第1駆動部及び前記第2駆動部を制御する駆動制御部と、を備え、
前記ロボットハンドは、
負圧を発生させて前記ワークの表面を吸着する吸着面を有する吸着部と、
前記ワーク搬送装置に接続される接続部と、
前記接続部と前記吸着部の間に配置され、前記ワークの表面に対して前記吸着部の吸着面を追従させるフローティング機構と、を備え、
前記駆動制御部は、
前記第1駆動部により前記ロボットハンドを下降させ、前記ワークの表面に前記吸着面を当接させる際、前記ロボットハンドに対して水平方向のうちいずれかの方向においてトルクを発生させないフリー状態を設定するように前記第2駆動部を制御するワーク搬送装置。
続きを表示(約 1,400 文字)
【請求項2】
前記第2駆動部は、水平方向において予め決められたX軸方向に前記ロボットハンドを移動させるX軸モータ、水平方向においてX軸方向に直交するY軸方向に前記ロボットハンドを移動させるY軸モータ、及び水平方向において前記ロボットハンドを回転させる回転軸モータのうち少なくともいずれか1つを備え、
前記駆動制御部は、前記第1駆動部を制御して前記ロボットハンドを下降させ、前記ワークの表面に前記吸着面を当接させる際、前記X軸モータ、前記Y軸モータ、及び前記回転軸モータのうち少なくともいずれか1つのモータへの電流を遮断することにより、前記フリー状態を設定する請求項1に記載のワーク搬送装置。
【請求項3】
前記駆動制御部は、
前記ロボットハンドの下降を開始させてから前記ワークの表面に前記吸着面を当接させる前までに、前記X軸モータ、前記Y軸モータ、及び前記回転軸モータのうち少なくともいずれか1つを前記フリー状態に設定し、
前記吸着部による前記ワークの吸着後、前記ロボットハンドの上昇を開始させてから当該上昇が完了し、水平方向において前記ロボットハンドを移動又は回転させる時までに当該フリー状態を解除する請求項2に記載のワーク搬送装置。
【請求項4】
前記フローティング機構は、
前記接続部に固定される第1プレートと、
前記吸着部が固定され、前記第1プレートに対向する第2プレートと、
前記第2プレートに立てて設けられているシャフトと、
前記第1プレートと前記第2プレートの間に配置され、それらが離間する方向に弾性力を加える弾性体と、を備え、
前記第1プレートは、前記第2プレートに向かって小径となるテーパ孔を備え、
前記シャフトの先端には、前記テーパ孔の形状に対応するテーパ面を有するテーパ部が設けられ、
前記シャフトは、前記テーパ孔に対して出し入れ可能、かつ、揺動可能に構成されるとともに、前記テーパ部は、前記テーパ孔に収容され、前記テーパ孔に対して係止可能に構成される請求項1~3のうちいずれか1項に記載のワーク搬送装置。
【請求項5】
液体、粉状体、又は粒状体が収容された袋体であるワークを吸着して、吊り上げて前記ワークを搬送するワーク搬送装置のワーク搬送プログラムであって、
前記ワーク搬送装置は、
ロボットハンドと、
前記ロボットハンドを上下方向に移動させる第1駆動部と、
前記ロボットハンドを水平方向に移動又は回転させる第2駆動部と、
前記第1駆動部及び前記第2駆動部を制御する駆動制御部と、を備え、
前記ロボットハンドは、
負圧を発生させて前記ワークの表面を吸着する吸着面を有する吸着部と、
前記ワーク搬送装置に接続される接続部と、
前記接続部と前記吸着部の間に配置され、前記ワークの表面に対して前記吸着部の吸着面を追従させるフローティング機構と、を備え、
前記第1駆動部により前記ロボットハンドを下降させ、前記ワークの表面に前記吸着面を当接させる際、前記ロボットハンドに対して水平方向のうちいずれかの方向においてトルクを発生させないフリー状態を設定するように前記第2駆動部を制御するフリー制御ステップを前記駆動制御部に実施させるワーク搬送プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワーク搬送装置、及びワーク搬送プログラムに関するものである。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来から、パレタイジングロボットやハンドリングロボットを利用することによって、袋体などのデパレタイジング作業(又はパレタイジング作業、以下同じ)の自動化が実施されている。このようなデパレタイジング作業の自動化に用いるロボットハンドとしては、例えば特許文献1に記載されているものが知られている。
【0003】
特許文献1に記載のロボットハンドは、吸着パッドをデパレタイジングすべきワークに当接させたのちに、吸着パッドに対してこれが連結されたチャンバを介して真空吸引力を作用させることにより、ワークを吸着パッドで吸着して吊り上げ、その吊り上げた状態で運ぶようになっている。
【0004】
ところで、米や穀物などを収容した袋体などのワークは、特定の実体がない変形し易いものである。このため、パレット上に積み上げられたときに、パレタイジング作業(積み上げ作業)時の積み卸し位置の誤差や運搬時の振動等によって内側に倒れ込むように荷崩れすることや、或いは外側に荷が割れて崩れる状態となっていることがある。すなわち、全てのワークが規則正しく積み上げられていない場合がある。そして、吸着パッドがワークの中央部に当接するようにロボットハンドの位置制御ができなかった場合には、ワークWの中央部からずれた箇所を偏心吸着して吊り上げることになる。そして、ずれによりワークに発生するモーメントの大きさが吸着パッドによるワークへの吸着力を上回った場合には、デパレタイジング作業中においてワークが吸着パッドから外れて落下することがある。
【0005】
そこで、特許文献2のロボットハンドでは、吸着パッドで吸着されたワークの偏心によって生じるモーメントを検出するモーメント検出手段を設け、このモーメント検出手段が検出したモーメントによって、吸着パッドのワークへの吸着位置を変更させる制御部を設けた。これにより、吸着パッドはワークの重心の部分を確実に吸着することができる。
【先行技術文献】
【特許文献】
【0006】
特開平6-80370号公報
特開平9-262786号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、袋体などのワークは、位置ずれするだけではなく、上面が水平になっていない場合がある。すなわち、米や穀物などを収容した袋体などのワークは、内容物の動きにより形状が変化し、上面が水平面に対して傾斜している場合がある。
【0008】
この場合、ワークに対して、吸着パッドを鉛直方向下方に押し当てても、ワークの上面が傾斜しているため、隙間が生じ、吸着力が低下し、安定的に吸着できない場合があるという問題があった。
【0009】
本発明は、上記課題に鑑みてなされたものであり、その目的は、ワークの姿勢にバラツキがある場合でも、ワークに対して吸着部を適切に当接させることができるワーク搬送装置、及びワーク搬送プログラムを提供することにある。
【課題を解決するための手段】
【0010】
上記課題を解決するためのワーク搬送装置は、
液体、粉状体、又は粒状体が収容された袋体であるワークを吸着して、吊り上げて前記ワークを搬送するワーク搬送装置であって、
ロボットハンドと、
前記ロボットハンドを上下方向に移動させる第1駆動部と、
前記ロボットハンドを水平方向に移動又は回転させる第2駆動部と、
前記第1駆動部及び前記第2駆動部を制御する駆動制御部と、を備え、
前記ロボットハンドは、
負圧を発生させて前記ワークの表面を吸着する吸着面を有する吸着部と、
前記ワーク搬送装置に接続される接続部と、
前記接続部と前記吸着部の間に配置され、前記ワークの表面に対して前記吸着部の吸着面を追従させるフローティング機構と、を備え、
前記駆動制御部は、
前記第1駆動部により前記ロボットハンドを下降させ、前記ワークの表面に前記吸着面を当接させる際、前記ロボットハンドに対して水平方向のうちいずれかの方向においてトルクを発生させないフリー状態を設定するように前記第2駆動部を制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
28日前
トヨタ自動車株式会社
関節機構
2日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
11日前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
1か月前
学校法人五島育英会
アーム機構
2日前
住友重機械工業株式会社
ロボット
22日前
株式会社イノウ
給油口キャップ用開閉具
29日前
庄内機械株式会社
釘打装置
15日前
川崎重工業株式会社
制動システム
28日前
株式会社アイエイアイ
グリッパー
17日前
株式会社PILLAR
チューブ保持治具
7日前
株式会社不二越
垂直多関節ロボット
29日前
オークラ輸送機株式会社
ハンド装置
10日前
芝浦機械株式会社
双腕ロボット
21日前
株式会社マキタ
電動作業機
3日前
株式会社マキタ
電動作業機
3日前
トヨタ自動車東日本株式会社
搬送治具
15日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
株式会社リコー
多関節ロボット
1日前
トヨタ自動車株式会社
荷姿影響緩和方法
18日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
29日前
パナソニック株式会社
工具
29日前
住友重機械工業株式会社
ロボット及びカバー
22日前
個人
回転移動式工具ホルダ
9日前
株式会社マキタ
電動工具
15日前
アピュアン株式会社
エアー式衝撃工具
1か月前
学校法人法政大学
装着型アシスト装置
1か月前
株式会社ダイヘン
端末装置
15日前
三菱電機株式会社
トルク締め個所検出システム
1か月前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ