TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025079403
公報種別
公開特許公報(A)
公開日
2025-05-22
出願番号
2023192028
出願日
2023-11-10
発明の名称
ロボットシステムおよびロボットシステムの制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20250515BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】締結部材が狭小な位置に配置されている場合でも、締結部材の締結および取り外しの少なくとも一方を行うことが可能なロボットシステムを提供する。
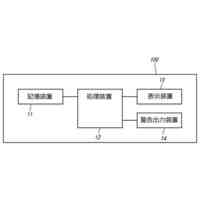
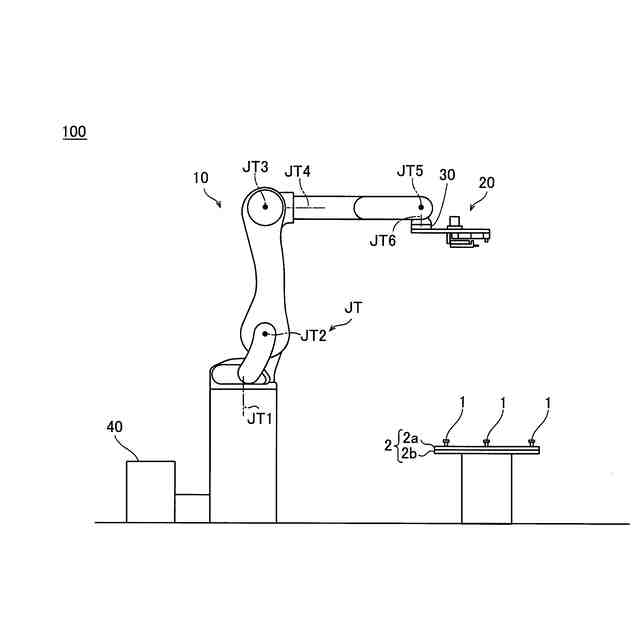
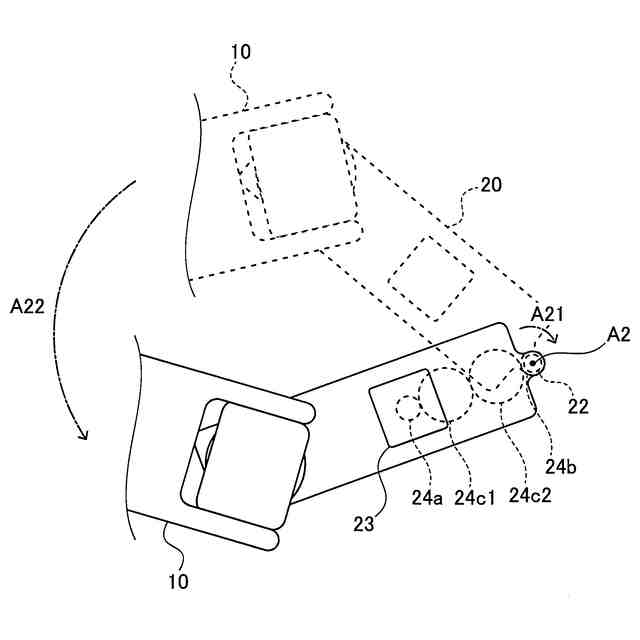
【解決手段】このロボットシステム100は、締結部材と係合する係合部材22と、係合部材22が取り付けられ、係合部材22を回転させるロボットアーム部10と、制御部とを備える。制御部は、締結部材に係合部材22が係合した状態で、ロボットアーム部10により係合部材22を所定の回転方向に回転させる回転動作と、係合部材22を相対的に空転させながら、ロボットアーム部10を係合部材22に対して所定の回転方向とは反対方向に回転させる空転動作とを行う。
【選択図】図2
特許請求の範囲
【請求項1】
締結部材と係合する係合部材と、
前記係合部材が取り付けられ、前記係合部材を回転させるロボットアーム部と、
前記締結部材に前記係合部材が係合した状態で、前記ロボットアーム部により前記係合部材を所定の回転方向に回転させる回転動作と、前記係合部材を相対的に空転させながら、前記ロボットアーム部を前記係合部材に対して前記所定の回転方向とは反対方向に回転させる空転動作とを行う制御部と、を備える、ロボットシステム。
続きを表示(約 1,400 文字)
【請求項2】
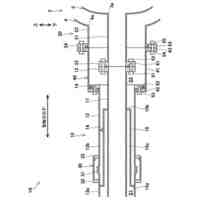
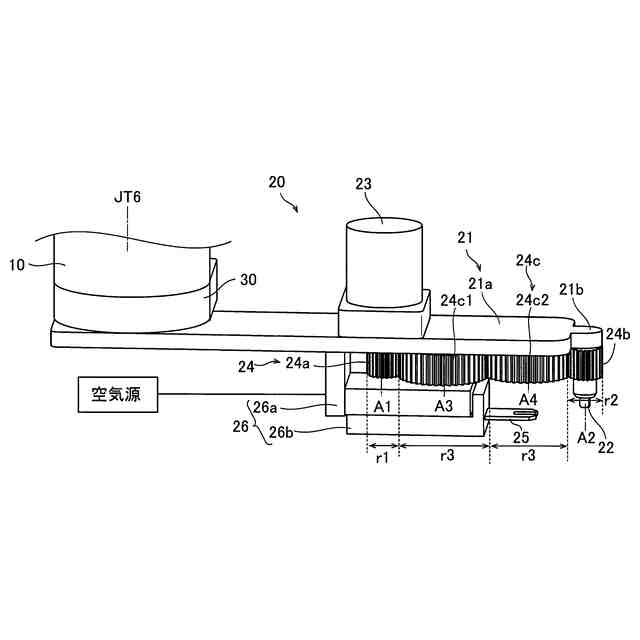
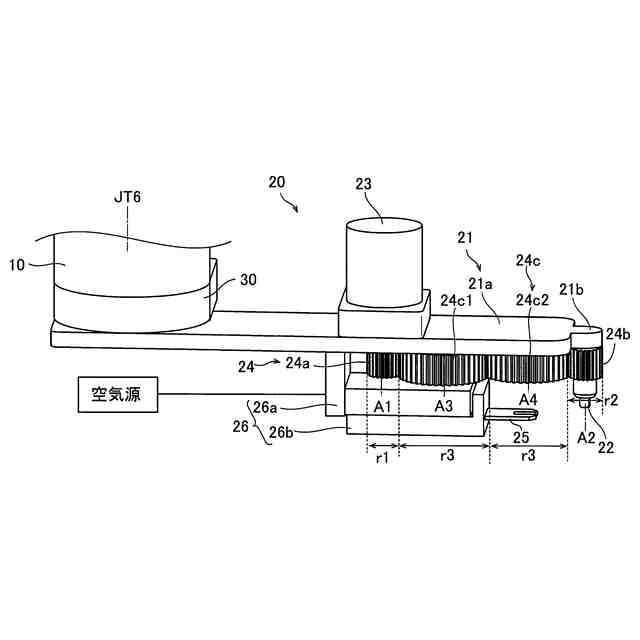
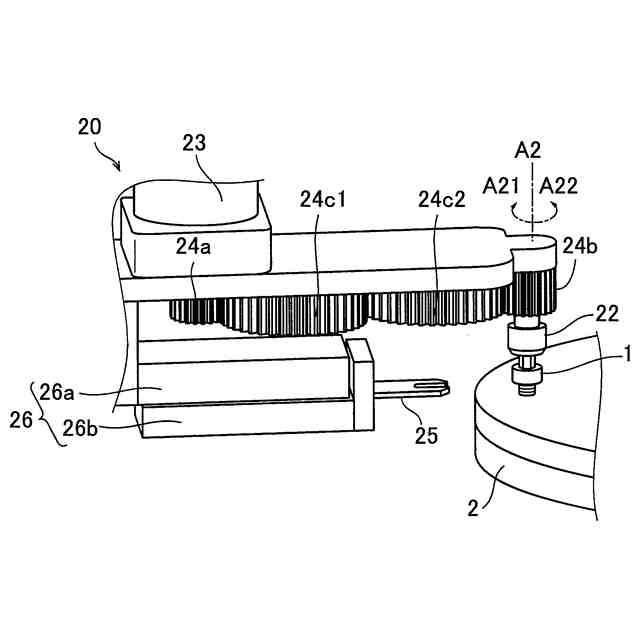
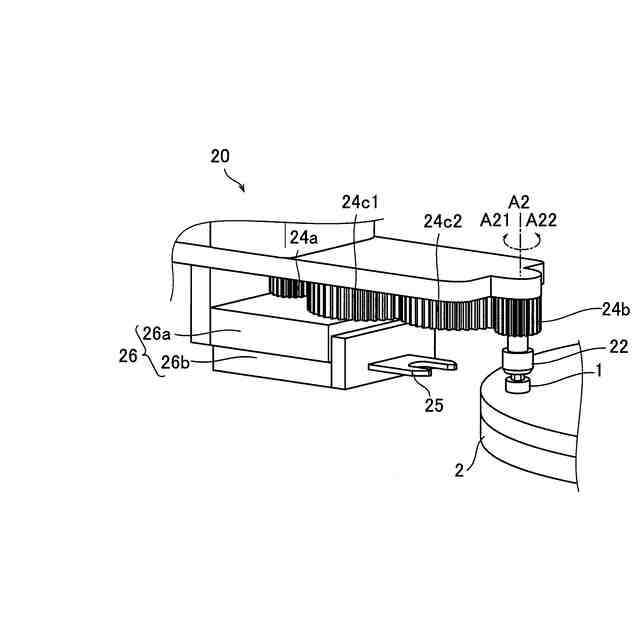
前記ロボットアーム部に取り付けられ、前記係合部材を含む締結部材回転機構と、
前記締結部材の中心軸線周りに前記係合部材を回転させる駆動部と、をさらに備え、
前記制御部は、前記空転動作において、前記締結部材に前記係合部材が係合した状態で、前記ロボットアーム部により前記締結部材回転機構の全体を前記所定の回転方向とは反対方向に回転させながら、前記ロボットアーム部による回転に相当する回転速度によって、前記駆動部により前記係合部材を前記所定の回転方向に相対的に回転させる、請求項1に記載のロボットシステム。
【請求項3】
前記制御部は、前記締結部材に前記係合部材が係合した状態で、前記回転動作と前記空転動作とを交互に実行する、請求項1または2に記載のロボットシステム。
【請求項4】
前記係合部材にかかるトルクを検出するトルクセンサを備え、
前記制御部は、前記トルクセンサに検出されたトルクが所定のトルク閾値に達するまで前記回転動作を行う、請求項1または2に記載のロボットシステム。
【請求項5】
前記締結部材回転機構は、前記駆動部の回転力を前記係合部材に伝達するギア部を含み、
前記ギア部は、
前記回転動作の際、ロックされており、
前記空転動作の際、前記駆動部の回転と共に回転する、請求項2に記載のロボットシステム。
【請求項6】
前記締結部材回転機構は、基端が前記ロボットアーム部に取り付けられる細長形状の取付部材を含み、
前記駆動部は、前記取付部材の中央部に配置され、
前記係合部材は、前記取付部材の先端に配置されている、請求項2に記載のロボットシステム。
【請求項7】
前記締結部材回転機構は、前記取付部材に配置され、前記駆動部の回転力を前記係合部材に伝達するギア部を含み、
前記ギア部は、
前記駆動部の回転軸線周りに回転する駆動部ギアと、
前記係合部材の回転軸線周りに回転する係合部ギアと、
前記駆動部ギアと前記係合部ギアとの間に配置され、前記駆動部ギアの回転を前記係合部ギアに伝達する中間ギアと、を含む、請求項6に記載のロボットシステム。
【請求項8】
前記駆動部ギアの直径と前記係合部ギアの直径とは、等しい、請求項7に記載のロボットシステム。
【請求項9】
前記係合部ギアの直径は、前記中間ギアの直径よりも小さい、請求項7に記載のロボットシステム。
【請求項10】
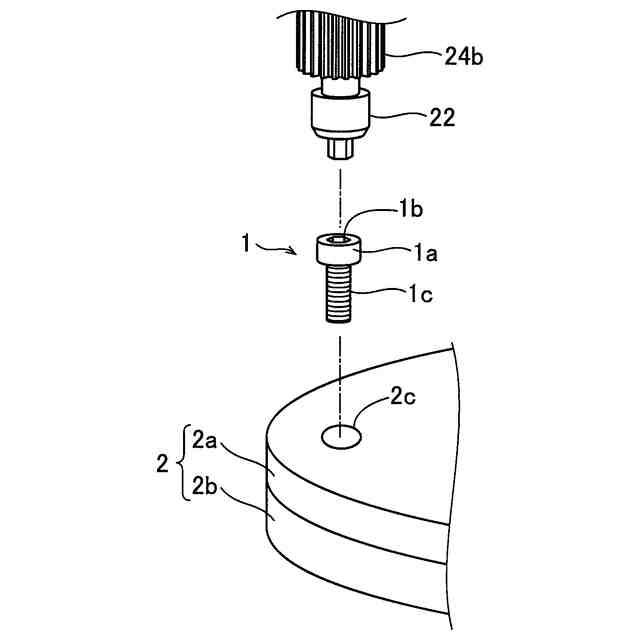
前記締結部材は、ねじ部材を含み、
前記ねじ部材のねじ頭を支持する支持部材と、
前記支持部材を前記締結部材に近づく方向または離間する方向に移動させる移動機構と、を備え、
前記制御部は、
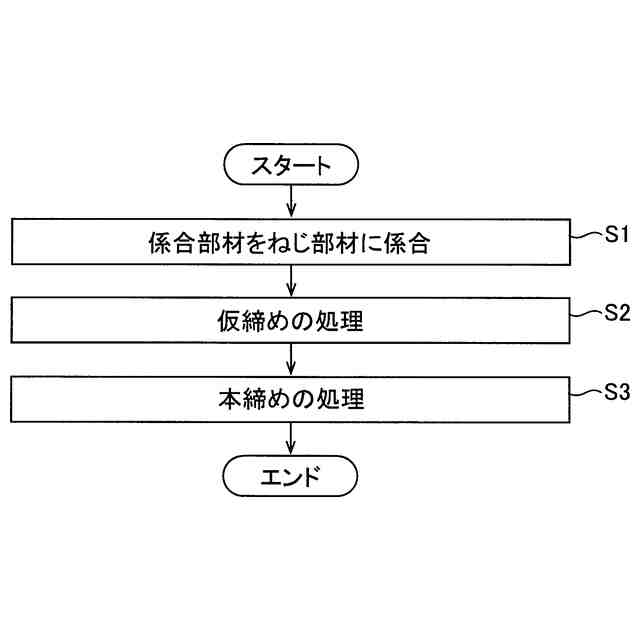
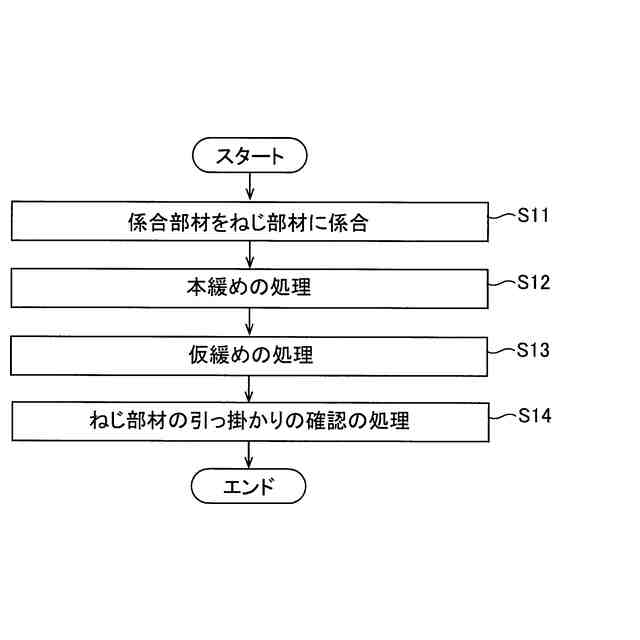
前記締結部材に前記係合部材が係合した状態で、前記回転動作と前記空転動作とによって前記締結部材を緩める処理と、
前記締結部材が緩められた状態で、前記移動機構により前記支持部材を、前記ねじ頭を支持する位置に移動させる処理と、
前記ねじ頭が前記支持部材に支持された状態で、前記ロボットアーム部により前記締結部材を移動させる処理と、を行う、請求項1または2に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットシステムおよびロボットシステムの制御方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、締結部材を回転させることにより締結部材を締結するロボットシステムが開示されている。特許文献1には、ロボットアーム部と、ロボットアーム部の先端に取り付けられるナットランナーと、を備えるロボットシステムが開示されている。なお、ナットランナーとは、ボルトを回転させることにより、ボルトのねじ込みを行う装置である。ナットランナーは、ボルトの頭に係合するビット部と、ビット部を回転させるモータとを含む。ビット部は、棒形状を有する。モータは、ビット部の上方に配置されており、モータの回転軸線と、棒形状のビット部の軸線とは一致している。
【先行技術文献】
【特許文献】
【0003】
国際公開第2017-104027号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示されているロボットシステムでは、ナットランナーによりボルトの締結が行われる。この場合に、ボルトの締結または取り外しに対して十分な回転トルクを得るためには、ナットランナーのモータが大型化する。そのため、ボルトが狭小な位置に配置されている場合、ナットランナーを狭小な位置に配置することができないため、ボルトを締結または取り外しできないという問題点がある。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、締結部材が狭小な位置に配置されている場合でも、締結部材の締結および取り外しの少なくとも一方を行うことが可能なロボットシステムおよびロボットシステムの制御方法を提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面によるロボットシステムは、締結部材と係合する係合部材と、係合部材が取り付けられ、係合部材を回転させるロボットアーム部と、締結部材に係合部材が係合した状態で、ロボットアーム部により係合部材を所定の回転方向に回転させる回転動作と、係合部材を相対的に空転させながら、ロボットアーム部を係合部材に対して所定の回転方向とは反対方向に回転させる空転動作とを行う制御部と、を備える。
【0007】
この開示の第1の局面によるロボットシステムは、上記のように、締結部材に係合部材が係合した状態で、ロボットアーム部により係合部材を所定の回転方向に回転させる回転動作と、係合部材を相対的に空転させながら、ロボットアーム部を係合部材に対して所定の回転方向とは反対方向に回転させる空転動作とを行う制御部を備える。これにより、ロボットアーム部による回転動作と空転動作とによって締結部材を回転させられるため、モータによってロボットアーム部と同等の回転トルクにより締結部材を回転させる場合に比べて、締結部材を回転させるための構成が大型化することを抑制できる。その結果、締結部材が狭小な位置に配置されている場合でも、締結部材の締結および取り外しの少なくとも一方を行うことができる。また、ロボットアーム部による回転動作と空転動作とによって締結部材を回転させられるため、ロボットアーム部を用いて容易に締結部材の締結および取り外しの少なくとも一方を行うことができる。
【0008】
この開示の第2の局面によるロボットシステムの制御方法は、締結部材に係合部材が係合した状態で、係合部材が取り付けられ、係合部材を回転させるロボットアーム部により係合部材を所定の回転方向に回転させる回転動作を行うことと、係合部材を相対的に空転させながら、ロボットアーム部を係合部材に対して所定の回転方向とは反対方向に回転させる空転動作を行うことと、を備える。
【0009】
この開示の第2の局面によるロボットシステムの制御方法は、上記のように、締結部材に係合部材が係合した状態で、係合部材が取り付けられ、係合部材を回転させるロボットアーム部により係合部材を所定の回転方向に回転させる回転動作を行うことと、係合部材を相対的に空転させながら、ロボットアーム部を係合部材に対して所定の回転方向とは反対方向に回転させる空転動作を行うことと、を備える。これにより、ロボットアーム部による回転動作と空転動作とによって締結部材を回転させられるため、モータによってロボットアーム部と同等の回転トルクにより締結部材を回転させる場合に比べて、締結部材を回転させるための構成が大型化することを抑制できる。その結果、締結部材が狭小な位置に配置されている場合でも、締結部材の締結および取り外しの少なくとも一方を行うことが可能なロボットシステムの制御方法を提供できる。また、ロボットアーム部による回転動作と空転動作とによって締結部材を回転させられるため、ロボットアーム部を用いて容易に締結部材の締結および取り外しの少なくとも一方を行うことが可能なロボットシステムの制御方法を提供できる。
【発明の効果】
【0010】
本開示のロボットシステムおよびロボットシステムの制御方法は、締結部材が狭小な位置に配置されている場合でも、締結部材の締結および取り外しの少なくとも一方を行うことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
液化水素用蒸発器
2日前
川崎重工業株式会社
基板製造システム
3日前
川崎重工業株式会社
廃棄物処理システム
7日前
川崎重工業株式会社
低温流体移送用二重配管
1日前
川崎重工業株式会社
検査システムおよび検査方法
10日前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
1日前
川崎重工業株式会社
操船支援システム、操船支援方法、及び、操船支援プログラム
1日前
川崎重工業株式会社
固体吸収材ならびにそれを用いた酸性ガスの吸収および脱離方法
3日前
川崎重工業株式会社
駅構内保守システム、駅構内保守方法、及び駅構内保守プログラム
6日前
川崎重工業株式会社
駅構内保守システム、駅構内保守方法、及び駅構内保守プログラム
6日前
川崎重工業株式会社
二重管接続構造、接続システムおよび二重管接続構造のシール材交換方法
2日前
川崎重工業株式会社
店舗業務支援システム、店舗業務支援方法、及び店舗業務支援プログラム
6日前
川崎重工業株式会社
ロボットシステム及びその制御方法
2日前
日東精工株式会社
電動ドライバ
10日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社ダイヘン
移動体
13日前
トヨタ自動車株式会社
関節機構
15日前
株式会社不二越
ロボット
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
24日前
株式会社スター精機
吸着パッド
9日前
株式会社スター精機
吸着パッド
9日前
工機ホールディングス株式会社
作業機
1日前
工機ホールディングス株式会社
作業機
1日前
学校法人五島育英会
アーム機構
15日前
工機ホールディングス株式会社
作業機
1日前
株式会社イノウ
給油口キャップ用開閉具
1か月前
株式会社アイエイアイ
グリッパー
1か月前
川崎重工業株式会社
制動システム
1か月前
住友重機械工業株式会社
ロボット
1か月前
庄内機械株式会社
釘打装置
28日前
株式会社PILLAR
チューブ保持治具
20日前
株式会社不二越
垂直多関節ロボット
1か月前
株式会社スター精機
産業用ロボット
7日前
オークラ輸送機株式会社
ハンド装置
23日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ