TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025079461
公報種別
公開特許公報(A)
公開日
2025-05-22
出願番号
2023192134
出願日
2023-11-10
発明の名称
ロボットシステムおよびロボットシステムの制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20250515BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】締結部材が狭小な位置に配置されている場合でも、締結部材を締結することが可能なロボットシステムを提供する。
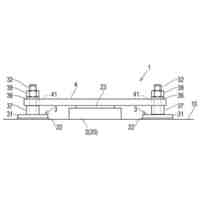
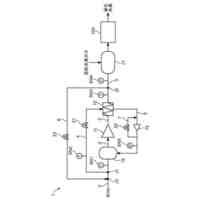
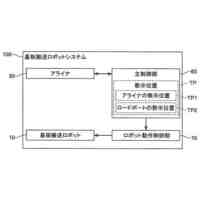
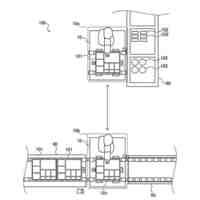
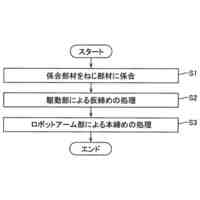
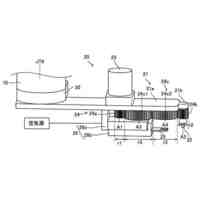
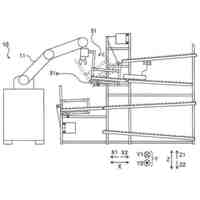
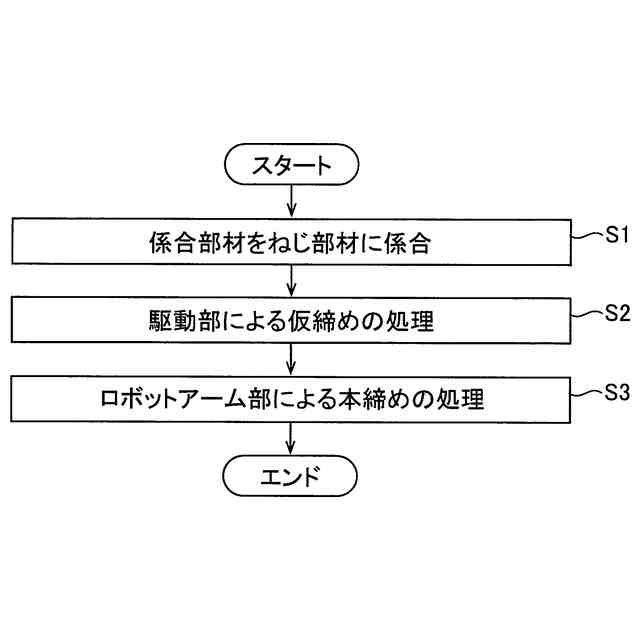
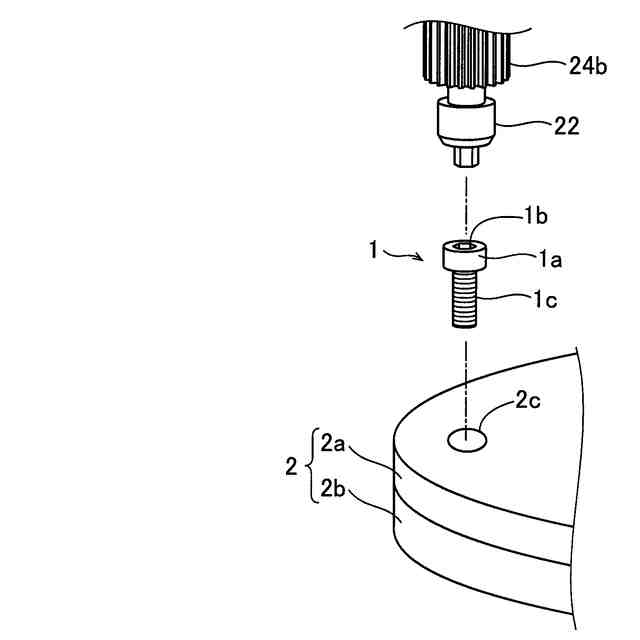
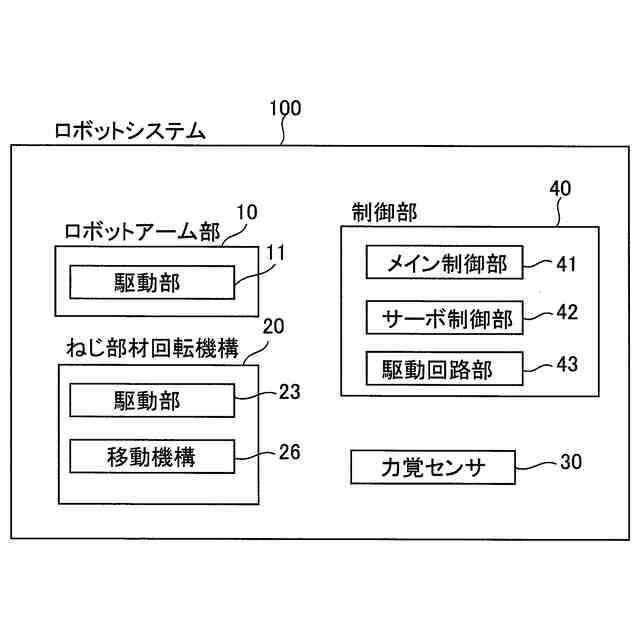
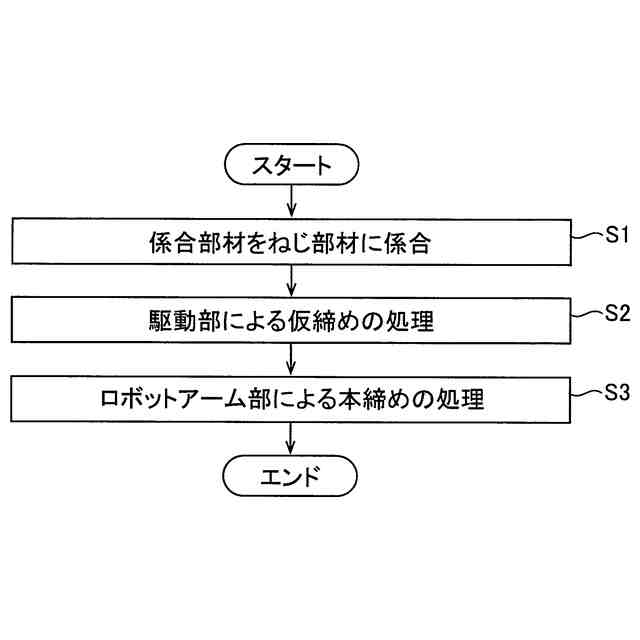
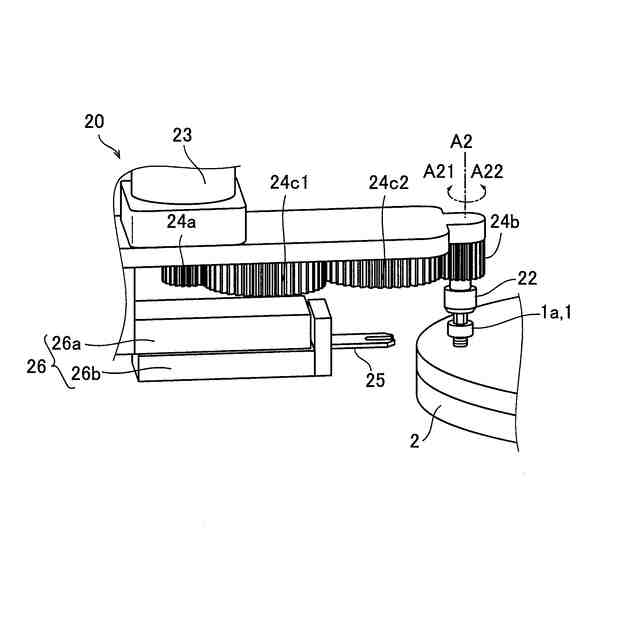
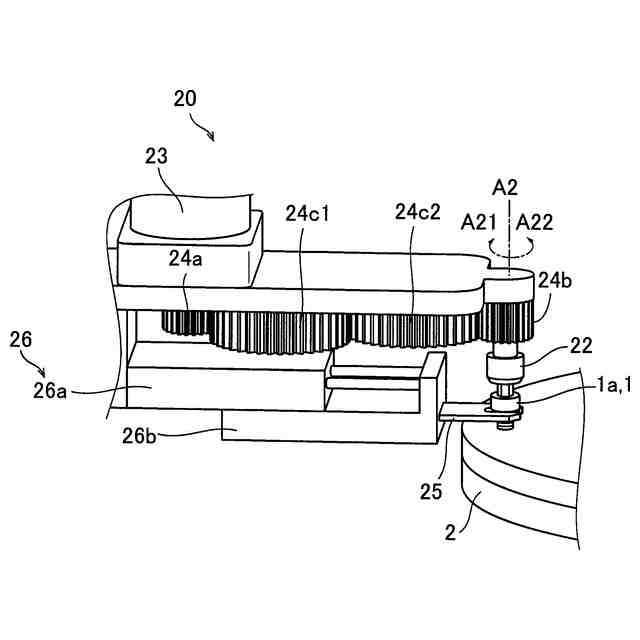
【解決手段】このロボットシステム100は、ロボットアーム部10と、ロボットアーム部10に取り付けられ、ねじ部材1と係合する係合部材22を含むねじ部材回転機構20と、ねじ部材1の中心軸線周りに係合部材を回転させる駆動部23と、制御部40と、を備える。制御部40は、ねじ部材1に係合部材22が係合した状態で、駆動部23により係合部材22を回転させることにより、ねじ部材1の仮締めを行う処理、および、ロボットアーム部10により係合部材22を回転させることにより、ねじ部材1の本締めを行う処理と、を行う。
【選択図】図5
特許請求の範囲
【請求項1】
ロボットアーム部と、
前記ロボットアーム部に取り付けられ、締結部材と係合する係合部材を含む、締結部材回転機構と、
前記締結部材の中心軸線周りに前記係合部材を回転させる駆動部と、
前記締結部材に前記係合部材が係合した状態で、前記駆動部により前記係合部材を回転させることにより、前記締結部材を仮締する処理、および、前記ロボットアーム部により前記係合部材を回転させることにより、前記締結部材を本締めする処理と、
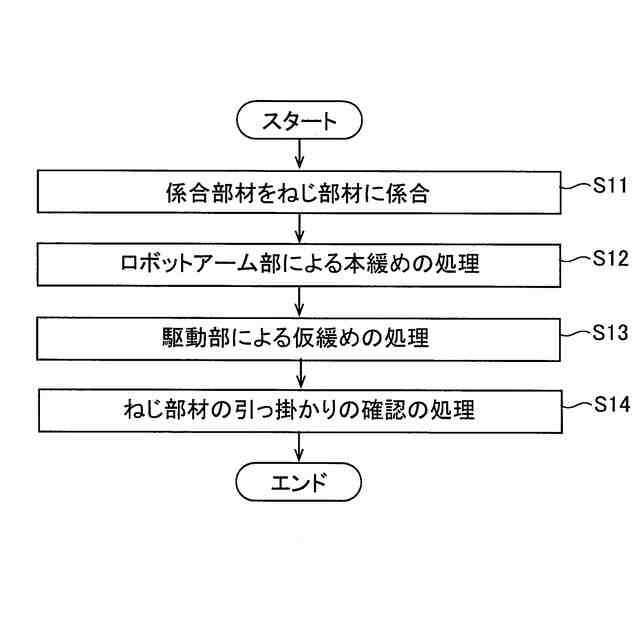
前記締結部材に前記係合部材が係合した状態で、前記ロボットアーム部により前記係合部材を回転させることにより、締結状態の前記締結部材を緩める本緩めする処理、および、前記駆動部により前記係合部材を回転させることにより、本緩めされた状態の前記締結部材を緩める仮緩めする処理と、
のうちの少なくとも一方を行う制御部と、を備える、ロボットシステム。
続きを表示(約 1,000 文字)
【請求項2】
前記仮締めを行う際の前記締結部材の回転速度は、前記本締めを行う際の前記締結部材の回転速度よりも大きい、請求項1に記載のロボットシステム。
【請求項3】
前記仮緩めを行う際の前記締結部材の回転速度は、前記本緩めを行う際の前記締結部材の回転速度よりも大きい、請求項1に記載のロボットシステム。
【請求項4】
前記制御部は、前記締結部材にかかるトルクが所定の第1トルク閾値を超えない範囲で前記仮締めする処理を行う、請求項1に記載のロボットシステム。
【請求項5】
前記係合部材にかかるトルクを検出するトルクセンサを備え、
前記制御部は、前記本締めの際、前記トルクセンサに検出されたトルクが所定の第2トルク閾値に達するまで前記締結部材を本締めする処理を行う、請求項1に記載のロボットシステム。
【請求項6】
前記締結部材回転機構は、前記駆動部の回転力を前記係合部材に伝達するギア部を含み、
前記ギア部は、
前記仮締めを行う際、前記駆動部の回転と共に回転し、前記本締めを行う際、ロックされている、請求項1に記載のロボットシステム。
【請求項7】
前記締結部材回転機構は、前記駆動部の回転力を前記係合部材に伝達するギア部を含み、
前記ギア部は、
前記仮緩めを行う際、前記駆動部の回転と共に回転し、前記本緩めを行う際、ロックされている、請求項1に記載のロボットシステム。
【請求項8】
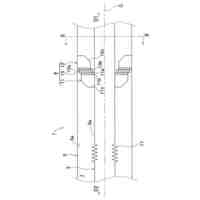
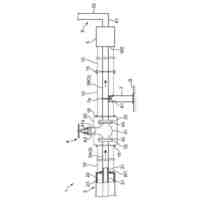
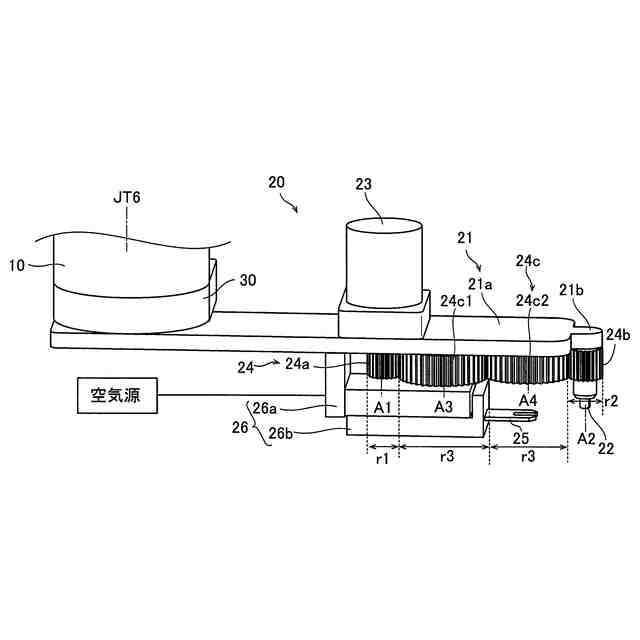
前記締結部材回転機構は、基端が前記ロボットアーム部に取り付けられる細長形状の取付部材を含み、
前記係合部材は、前記取付部材の先端に配置され、
前記駆動部は、前記取付部材の中央部に配置されている、請求項1に記載のロボットシステム。
【請求項9】
前記締結部材回転機構は、前記取付部材に配置され、前記駆動部の回転力を前記係合部材に伝達するギア部を含み、
前記ギア部は、
前記駆動部の回転軸線周りに回転する駆動部ギアと、
前記係合部材の回転軸線周りに回転する係合部ギアと、
前記駆動部ギアと前記係合部ギアとの間に配置され、前記駆動部ギアの回転を前記係合部ギアに伝達する中間ギアと、を含む、請求項8に記載のロボットシステム。
【請求項10】
前記駆動部ギアの直径と前記係合部ギアの直径とは、等しい、請求項9に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットシステムおよびロボットシステムの制御方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、締結部材を回転させることにより締結部材を締結するロボットシステムが開示されている。特許文献1には、ロボットアーム部と、ロボットアーム部の先端に取り付けられるナットランナーと、を備えるロボットシステムが開示されている。なお、ナットランナーとは、ボルトを回転させることにより、ボルトのねじ込みを行う装置である。ナットランナーは、ボルトの頭に係合するビット部と、ビット部を回転させるモータとを含む。ビット部は、棒形状を有する。モータは、ビット部の上方に配置されており、モータの回転軸線と、棒形状のビット部の軸線とは一致している。また、特許文献1では、ボルトのねじ込みの初期の段階で仮締め処理が行われ、ねじ込みが所定の位置まで進んだ状態で本締め処理が行われる。
【先行技術文献】
【特許文献】
【0003】
国際公開第2017-104027号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示されているロボットシステムでは、ナットランナーによりボルトの仮締め処理と本締め処理とが行われる。一般的に、本締め処理は、仮締め処理に比べて大きなトルクを有する。このため、特許文献1に開示されているロボットシステムでは、ナットランナーのモータが大型化する。そのため、ボルトが狭小な位置に配置されている場合、ナットランナーを狭小な位置に配置することができないため、ナットを締結できないという問題点がある。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、締結部材が狭小な位置に配置されている場合でも、締結部材を締結することが可能なロボットシステムおよびロボットシステムの制御方法を提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面によるロボットシステムは、ロボットアーム部と、ロボットアーム部に取り付けられ、締結部材と係合する係合部材を含む、締結部材回転機構と、締結部材の中心軸線周りに係合部材を回転させる駆動部と、締結部材に係合部材が係合した状態で、駆動部により係合部材を回転させることにより、締結部材を仮締する処理、および、ロボットアーム部により係合部材を回転させることにより、締結部材を本締めする処理と、締結部材に係合部材が係合した状態で、ロボットアーム部により係合部材を回転させることにより、締結状態の締結部材を緩める本緩めする処理、および、駆動部により係合部材を回転させることにより、本緩めされた状態の締結部材を緩める仮緩めする処理と、のうちの少なくとも一方を行う制御部と、を備える。
【0007】
この開示の第1の局面によるロボットシステムは、上記のように、ロボットアーム部により係合部材を回転させることにより、締結部材を本締めする処理と、ロボットアーム部により係合部材を回転させることにより、締結部材を本緩めする処理と、のうちの少なくとも一方を行う制御部を備える。これにより、比較的大きいトルクを要する本締めと本緩めとのうちの少なくとも一方が、ロボットアーム部により行われるので、締結部材回転機構の駆動部が大型化することを抑制できる。すなわち、締結部材回転機構が比較的小型になるので、締結部材が狭小な位置に配置されている場合でも、締結部材回転機構を締結部材が配置されている位置に配置することができる。その結果、締結部材が狭小な位置に配置されている場合でも、締結部材を締結することができる。
【0008】
この開示の第2の局面によるロボットシステムの制御方法は、締結部材に係合部材が係合した状態で、締結部材の中心軸線周りに係合部材を回転させる駆動部により係合部材を回転させることにより、締結部材を仮締めすること、および、ロボットアーム部により係合部材を回転させることにより、締結部材を本締めすることと、締結部材に係合部材が係合した状態で、ロボットアーム部により係合部材を回転させることにより、締結状態の締結部材を緩める本緩めすること、および、駆動部により係合部材を回転させることにより、本緩めされた状態の締結部材を緩める仮緩めすることと、のうちの少なくとも一方を行うこと、を備える。
【0009】
この開示の第2の局面によるロボットシステムの制御方法は、上記のように、ロボットアーム部により係合部材を回転させることにより、締結部材の本締めすることと、ロボットアーム部により係合部材を回転させることにより、締結部材の本緩めすること、のうちの少なくとも一方を行うこと、を備える。これにより、比較的大きいトルクを要する本締めと本緩めとのうちの少なくとも一方が、ロボットアーム部により行われるので、締結部材回転機構の駆動部が大型化することを抑制できる。すなわち、締結部材回転機構が比較的小型になるので、締結部材が狭小な位置に配置されている場合でも、締結部材回転機構を締結部材が配置されている位置に配置することができる。その結果、締結部材が狭小な位置に配置されている場合でも、締結部材を締結することが可能なロボットシステムの制御方法を提供できる。
【発明の効果】
【0010】
本開示のロボットシステムおよびロボットシステムの制御方法は、締結部材が狭小な位置に配置されている場合でも、締結部材を締結することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
水素航空機
27日前
川崎重工業株式会社
竪型タンク
23日前
川崎重工業株式会社
制動システム
1か月前
川崎重工業株式会社
動翼の制振構造
1か月前
川崎重工業株式会社
遠心式ターボ機械
22日前
川崎重工業株式会社
遠心式ターボ機械
17日前
川崎重工業株式会社
エンドエフェクタ
13日前
川崎重工業株式会社
基板製造システム
3日前
川崎重工業株式会社
液化水素用蒸発器
2日前
川崎重工業株式会社
廃棄物処理システム
1か月前
川崎重工業株式会社
廃棄物処理システム
1か月前
川崎重工業株式会社
廃棄物処理システム
7日前
川崎重工業株式会社
段差昇降用移動装置
1か月前
川崎重工業株式会社
固定装置及び固定方法
24日前
川崎重工業株式会社
低温流体移送用二重配管
1日前
川崎重工業株式会社
低温流体の移送システム
28日前
川崎重工業株式会社
極低温流体用配管システム
16日前
川崎重工業株式会社
基板搬送ロボットシステム
1か月前
川崎重工業株式会社
流体軸受およびターボ機械
22日前
川崎重工業株式会社
検査システムおよび検査方法
16日前
川崎重工業株式会社
検査システムおよび検査方法
10日前
川崎重工業株式会社
アンモニア除害装置及び方法
1か月前
川崎重工業株式会社
温度履歴解析システム及び方法
1か月前
川崎重工業株式会社
適応制御システムおよび適応制御方法
21日前
川崎重工業株式会社
温度推移解析装置及び温度推移解析方法
1か月前
川崎重工業株式会社
水素燃料供給システム及び水素の液化方法
1か月前
川崎重工業株式会社
水素燃料供給システム及び水素の液化方法
1か月前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
1日前
川崎重工業株式会社
荷役システム、切離し方法、及び、荷役開始方法
22日前
川崎重工業株式会社
燃料噴射量制御システムおよび燃料噴射量制御方法
1か月前
川崎重工業株式会社
異常検知装置、異常検知システム及び異常検知方法
1か月前
川崎重工業株式会社
搬送システム、搬送物の搬送方法、および、ロボット
28日前
川崎重工業株式会社
ロボットシステムおよびロボットシステムの制御方法
21日前
川崎重工業株式会社
ロボットシステムおよびロボットシステムの制御方法
21日前
川崎重工業株式会社
作業管理システムおよびそれに用いられる情報処理装置
2か月前
川崎重工業株式会社
ロボットシステム、ロボット動作方法、および、ロボット
28日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ