TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025079174
公報種別
公開特許公報(A)
公開日
2025-05-21
出願番号
2023191683
出願日
2023-11-09
発明の名称
システム、ロボット搭載移動装置及びロボット搭載移動装置の動作の制御に用いられるプログラム
出願人
DMG森精機株式会社
代理人
弁理士法人タス・マイスター
主分類
B25J
15/04 20060101AFI20250514BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】移動可能なロボットを用いて作業を行うシステムにおいて、作業効率を向上させる。
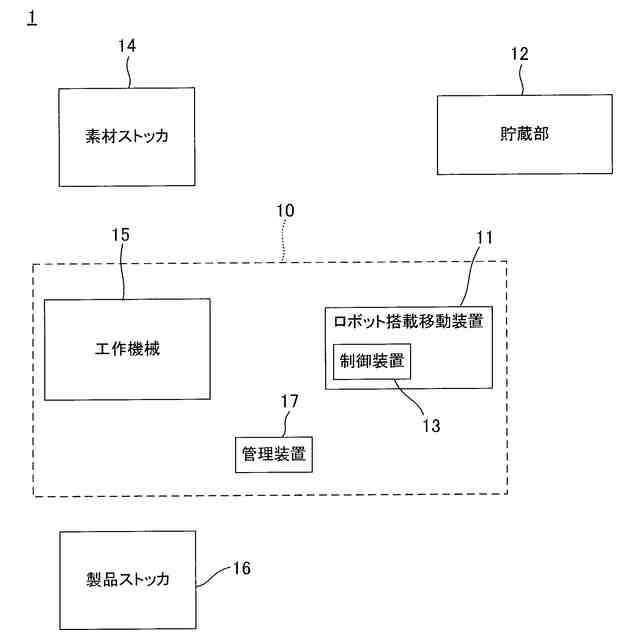
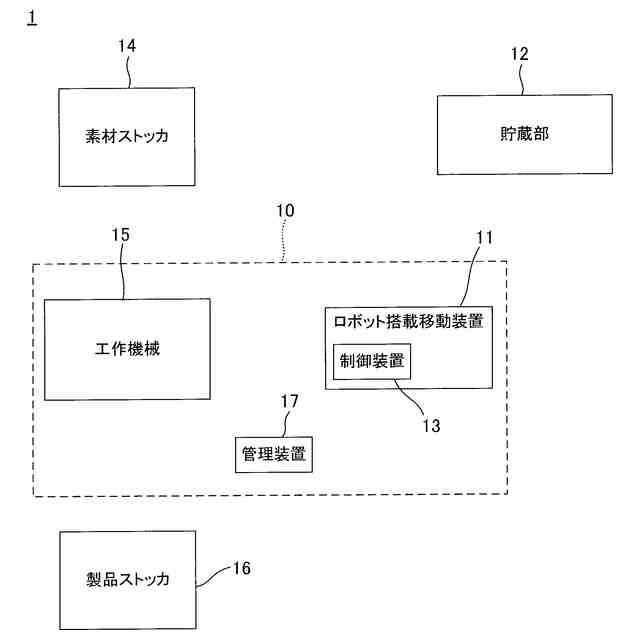
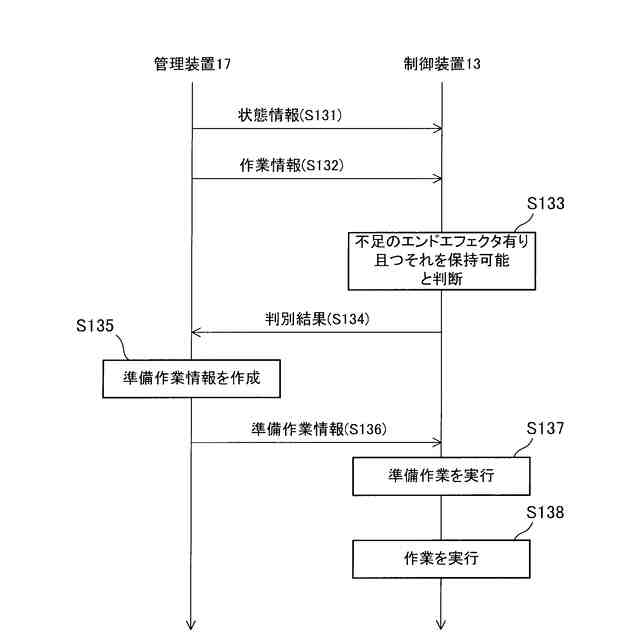
【解決手段】システム1は、ロボット搭載移動装置11と、貯蔵部12と、制御装置13と、を備える。制御装置13は、ロボット搭載移動装置11が作業に必要なエンドエフェクタの少なくとも一つを保持していないと判断した場合、ロボット搭載移動装置が不足のエンドエフェクタを、保持可能か否かを状態情報に基づいて判断し、保持可能と判断すると、作業を実行させる前に、ロボット搭載移動装置11を貯蔵部12に移動させる準備作業を実行させ、貯蔵部12に収容されている不足のエンドエフェクタをロボット搭載移動装置11が保持した後、ロボット搭載移動装置11に作業情報に基づいた作業を実行させる。
【選択図】図1
特許請求の範囲
【請求項1】
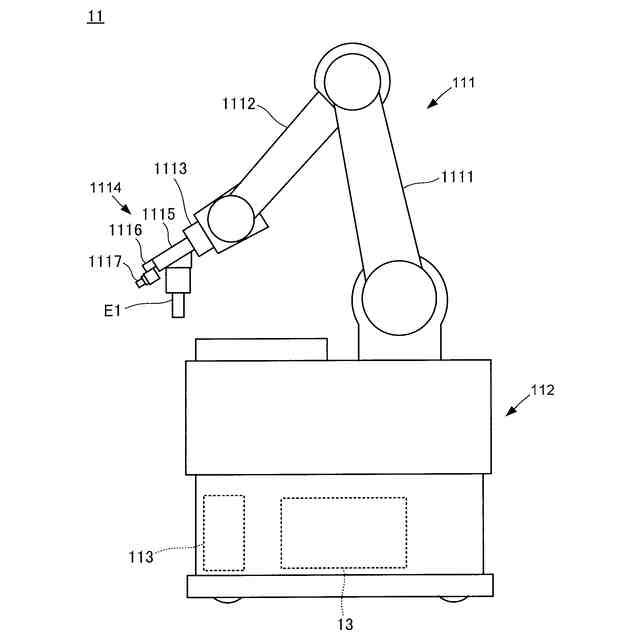
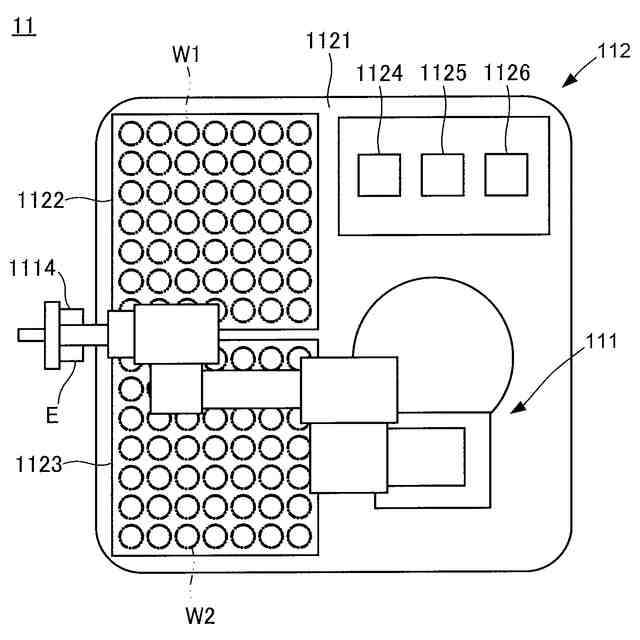
エンドエフェクタが装着される装着部を有するロボット、及び前記ロボットを搭載するとともに、前記装着部に取り付けられるエンドエフェクタを積載可能な一以上の積載部を有し、対象物に対して設定された作業位置に移動可能な移動車を備えるロボット搭載移動装置と、
前記装着部に取り付け可能な複数種類のエンドエフェクタが収容されている貯蔵部と、
前記ロボット搭載移動装置の動作を制御する制御装置と、を備えたシステムであって、
前記制御装置は、
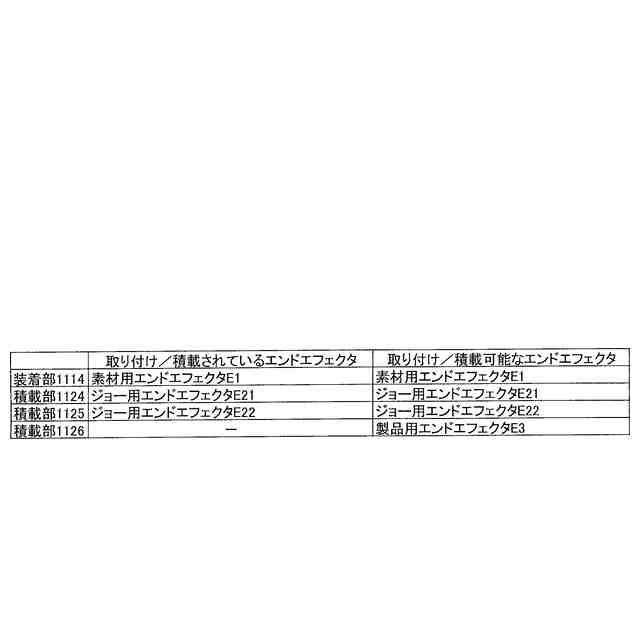
前記ロボット搭載移動装置に実行させる作業の情報及び前記作業の実行に必要なエンドエフェクタの種類の情報を含む作業情報、並びに前記装着部に取り付けられているエンドエフェクタの種類の情報及び前記積載部に積載されているエンドエフェクタの種類の情報を含む状態情報を取得する取得部と、
前記取得部が取得した前記作業情報及び前記状態情報に基づいて前記ロボット搭載移動装置が前記作業に必要な全ての種類のエンドエフェクタを保持しているか否かを判別する判別処理部と、
前記判別処理部による判別結果に基づいて、前記ロボット搭載移動装置の動作を制御する動作制御部と、を備え、
前記動作制御部は、
前記判別処理部において、前記ロボット搭載移動装置が前記作業に必要な全ての種類のエンドエフェクタを保持していると判断された場合、前記ロボット搭載移動装置に前記作業情報に基づいた作業を実行させ、
一方、前記判別処理部において、前記ロボット搭載移動装置が前記作業に必要なエンドエフェクタの少なくとも一つを保持していないと判断された場合、前記判別処理部において前記ロボット搭載移動装置が不足のエンドエフェクタを、保持可能か否かが前記状態情報に基づいて判断され、保持可能と判断されると、
前記作業を実行させる前に、前記ロボット搭載移動装置を前記貯蔵部に移動させる準備作業を実行させ、前記貯蔵部に収容されている前記不足のエンドエフェクタを前記ロボット搭載移動装置が保持した後、前記ロボット搭載移動装置に前記作業情報に基づいた作業を実行させるように構成されている、システム。
続きを表示(約 2,800 文字)
【請求項2】
請求項1に記載のシステムであって、
前記状態情報は、前記ロボット搭載移動装置が保持可能なエンドエフェクタの種類の情報を更に含み、
前記動作制御部は、
前記判別処理部において、前記ロボット搭載移動装置が前記作業に必要なエンドエフェクタの少なくとも一つを保持していないと判断された場合、
空いている前記装着部及び前記積載部の数、並びに前記空いている装着部又は積載部が前記不足のエンドエフェクタに対応しているか否かを前記状態情報に基づいて判断し、
空いている前記装着部又は前記積載部が有り、且つ、空いている前記装着部又は前記積載部が前記不足のエンドエフェクタに対応していると判断すると、前記準備作業を実行させるように構成されている、システム。
【請求項3】
請求項1又は2に記載のシステムであって、
前記動作制御部は、
前記判別処理部において、前記ロボット搭載移動装置が前記作業に必要なエンドエフェクタの少なくとも一つを保持していないと判断された場合、前記ロボット搭載移動装置が不足のエンドエフェクタを、保持可能か否かを前記状態情報に基づいて判断し、保持不可能と判断されると、
前記作業情報に基づいて前記ロボット搭載移動装置に作業の少なくとも一部を実行させた後であり、かつ、前記不足のエンドエフェクタが必要となる作業の前に前記ロボット搭載移動装置を前記貯蔵部に移動させ、前記貯蔵部に収容されている前記不足のエンドエフェクタを前記ロボット搭載移動装置が保持した後、前記ロボット搭載移動装置に前記不足のエンドエフェクタが必要となる作業を実行させるように構成されている、システム。
【請求項4】
請求項1又は2に記載のシステムであって、
前記一以上の積載部は、
当該積載部に積載可能な前記エンドエフェクタの形状に対応した形状を有する、システム。
【請求項5】
請求項1又は2に記載のシステムであって、
前記一以上の積載部は、
当該積載部に積載可能な前記エンドエフェクタを固定する固定機構を有する、システム。
【請求項6】
請求項1又は2に記載のシステムであって、
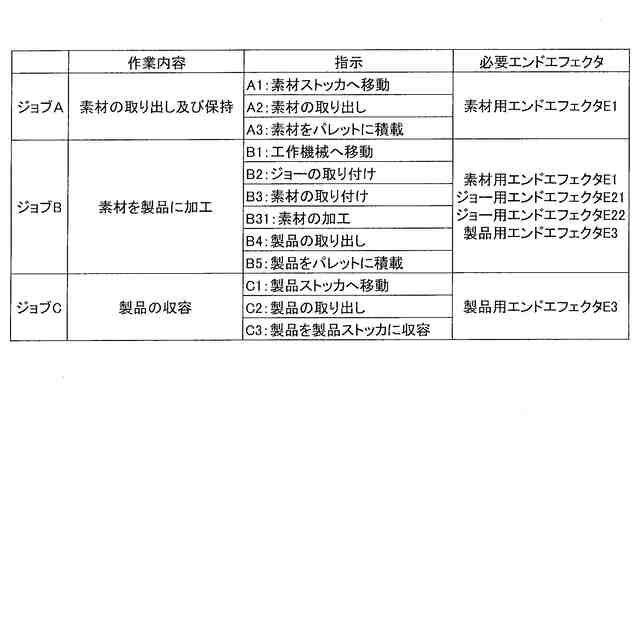
前記作業情報は、前記ロボット搭載移動装置に実行させる作業内容が記述された情報である、システム。
【請求項7】
請求項1又は2に記載のシステムであって、
前記貯蔵部は、
前記作業位置を含む範囲であって、前記ロボット搭載移動装置が前記対象物に対して実行する作業における前記ロボット搭載移動装置の動作範囲外に設けられる、システム。
【請求項8】
エンドエフェクタが装着される装着部を有するロボットと、
前記ロボットを搭載するとともに、前記装着部に取り付けられるエンドエフェクタを積載可能な一以上の積載部を有し、対象物に対して設定された作業位置に移動可能な移動車と、
前記ロボットの動作及び前記移動車の動作を制御する制御装置と、を備えたロボット搭載移動装置であって、
前記制御装置は、
実行する作業の情報及び前記作業の実行に必要なエンドエフェクタの種類の情報を含む作業情報、並びに前記装着部に取り付けられているエンドエフェクタの種類の情報及び前記積載部に積載されているエンドエフェクタの種類の情報を含む状態情報を取得する取得部と、
前記取得部が取得した前記作業情報及び前記状態情報に基づいて前記作業に必要な全ての種類のエンドエフェクタを保持しているか否かを判別する判別処理部と、
前記判別処理部による判別結果に基づいて、前記ロボットの動作及び前記移動車の動作を制御する動作制御部と、を備え、
前記動作制御部は、
前記判別処理部において、前記作業に必要な全ての種類のエンドエフェクタを保持していると判断された場合、前記作業情報に基づいた作業を実行し、
一方、前記判別処理部において、前記作業に必要なエンドエフェクタの少なくとも一つを保持していないと判断された場合、不足のエンドエフェクタを、保持可能か否かを前記状態情報に基づいて判断し、保持可能と判断されると、
前記作業を実行する前に、前記移動車を不足のエンドエフェクタが収容された貯蔵部に移動させる準備作業を実行し、前記貯蔵部に収容されている前記不足のエンドエフェクタを保持した後、前記作業情報に基づいた作業を実行するように構成されている、ロボット搭載移動装置。
【請求項9】
エンドエフェクタが装着される装着部を有するロボットと、前記ロボットを搭載するとともに、前記装着部に取り付けられるエンドエフェクタを積載可能な一以上の積載部を有し、対象物に対して設定された作業位置に移動可能な移動車と、を備えたロボット搭載移動装置の動作を制御する制御装置において用いられるプログラムであって、
コンピュータを、
前記ロボット搭載移動装置に実行させる作業の情報及び前記作業の実行に必要なエンドエフェクタの種類の情報を含む作業情報、並びに前記装着部に取り付けられているエンドエフェクタの種類の情報及び前記積載部に積載されているエンドエフェクタの種類の情報を含む状態情報を取得する取得部と、
前記取得部が取得した前記作業情報及び前記状態情報に基づいて前記ロボット搭載移動装置が前記作業に必要な全ての種類のエンドエフェクタを保持しているか否かを判別する判別処理部と、
前記判別処理部による判別結果に基づいて、前記ロボット搭載移動装置の動作を制御する動作制御部として機能させるためのプログラムであり、
前記動作制御部は、
前記判別処理部において、前記ロボット搭載移動装置が前記作業に必要な全ての種類のエンドエフェクタを保持していると判断された場合、前記ロボット搭載移動装置に前記作業情報に基づいた作業を実行させ、
一方、前記判別処理部において、前記ロボット搭載移動装置が前記作業に必要なエンドエフェクタの少なくとも一つを保持していないと判断された場合、前記ロボット搭載移動装置が不足のエンドエフェクタを、保持可能か否かを前記状態情報に基づいて判断し、保持可能と判断されると、
前記作業を実行させる前に、前記ロボット搭載移動装置を不足のエンドエフェクタが収容された貯蔵部に移動させる準備作業を実行させ、前記貯蔵部に収容されている前記不足のエンドエフェクタを前記ロボット搭載移動装置が保持した後、前記ロボット搭載移動装置に前記作業情報に基づいた作業を実行させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物に対して移動可能なロボット搭載移動装置と、ロボット搭載移動装置が保持可能なエンドエフェクタが収容されている貯蔵部と、ロボット搭載移動装置の動作を制御する制御装置とを備えたシステム、当該システムに用いられるロボット搭載移動装置及びロボット搭載移動装置の動作の制御に用いられるプログラムに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
従来から、ロボットや無人搬送車を用いて物を生産する生産システムが知られている。この生産システムでは、例えば、工場内に複数の工作機械が適宜配設され、無人搬送車が各工作機械に加工前のワークや工具等を搬送する。また、無人搬送車は、各工作機械において加工されたワークや使用済みの工具等を回収する。このような生産システムは、例えば特許文献1に開示される。
【0003】
特許文献1の生産システムでは、走行路上を移動可能な走行形ロボットが用いられる。走行路の片側には、それぞれに組立ワークが置かれた複数の給材パレットが配置される。走行形ロボットは、各給材パレットの前に順次移動し、各給材パレットから組立ワークを取り出す。走行形ロボットは、ある組立ワークを取り出す際、ロボットに現在取り付けられている把持ハンドを、その組立ワークの形状に対応した把持ハンドに交換する。交換用の把持ハンドは、走行形ロボットに設けられた把持ハンド置台に配置される。
【先行技術文献】
【特許文献】
【0004】
実開平6-46882号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一般に、走行形ロボットは、把持ハンドを交換する必要があるとき、複数種類の交換用の把持ハンドが収容されているハンドステーションへ移動し、把持ハンドを交換する。この場合、走行形ロボットは、把持ハンドの交換が必要となるたびにハンドステーションへ移動する必要がある。これに対し、特許文献1の生産システムでは、走行形ロボットに交換用の把持ハンドが設けられる。そのため、走行形ロボットは、取り出すワークの種類が変わるたびにハンドステーションへ移動し、ハンドを交換する必要が無い。これにより、作業効率が向上する。
【0006】
しかしながら、特許文献1には交換用の把持ハンドをどのようにして把持ハンド置台に準備するかの開示は無い。また、特許文献1では把持ハンド置台に設けられた把持ハンドで走行形ロボットが全ての作業を実行できるかは不明である。例えば、走行形ロボットがいくつかの把持ハンドを用いて給材パレットから組立ワークを取り出した後、次の給材パレットから取り出す組立ワークに対応した把持ハンドを用意していないことも想定される。このような状況は、作業中に走行形ロボットが使用する把持ハンドの種類が多い場合や、作業内容が変更となった場合に生じやすい。この場合、走行形ロボットは、作業を中断し、必要な把持ハンドをハンドステーション等に取りに行く必要がある。その結果、作業効率が低下する可能性がある。
【0007】
本発明は、移動可能なロボットを用いて作業を行うシステムにおいて、作業効率を向上させることを目的とする。
【課題を解決するための手段】
【0008】
本発明のシステムは、
エンドエフェクタが装着される装着部を有するロボット、及び前記ロボットを搭載するとともに、前記装着部に取り付けられるエンドエフェクタを積載可能な一以上の積載部を有し、対象物に対して設定された作業位置に移動可能な移動車を備えるロボット搭載移動装置と、
前記装着部に取り付け可能な複数種類のエンドエフェクタが収容されている貯蔵部と、
前記ロボット搭載移動装置の動作を制御する制御装置と、を備えたシステムであって、
前記制御装置は、
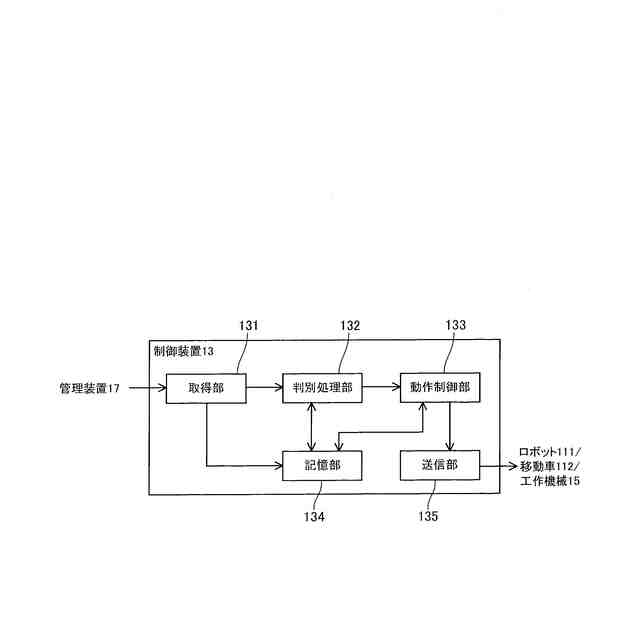
前記ロボット搭載移動装置に実行させる作業の情報及び前記作業の実行に必要なエンドエフェクタの種類の情報を含む作業情報、並びに前記装着部に取り付けられているエンドエフェクタの種類の情報及び前記積載部に積載されているエンドエフェクタの種類の情報を含む状態情報を取得する取得部と、
前記取得部が取得した前記作業情報及び前記状態情報に基づいて前記ロボット搭載移動装置が前記作業に必要な全ての種類のエンドエフェクタを保持しているか否かを判別する判別処理部と、
前記判別処理部による判別結果に基づいて、前記ロボット搭載移動装置の動作を制御する動作制御部と、を備え、
前記動作制御部は、
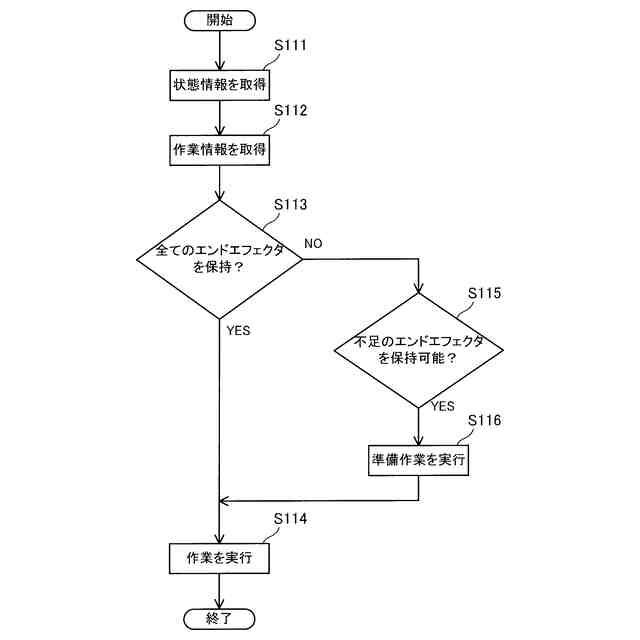
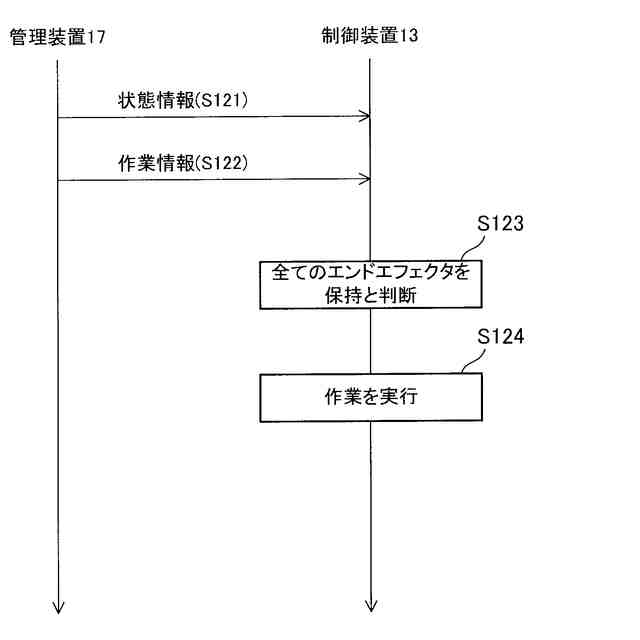
前記判別処理部において、前記ロボット搭載移動装置が前記作業に必要な全ての種類のエンドエフェクタを保持していると判断された場合、前記ロボット搭載移動装置に前記作業情報に基づいた作業を実行させ、
一方、前記判別処理部において、前記ロボット搭載移動装置が前記作業に必要なエンドエフェクタの少なくとも一つを保持していないと判断された場合、前記判別処理部において前記ロボット搭載移動装置が不足のエンドエフェクタを、保持可能か否かが前記状態情報に基づいて判断され、保持可能と判断されると、
前記作業を実行させる前に、前記ロボット搭載移動装置を前記貯蔵部に移動させる準備作業を実行させ、前記貯蔵部に収容されている前記不足のエンドエフェクタを前記ロボット搭載移動装置が保持した後、前記ロボット搭載移動装置に前記作業情報に基づいた作業を実行させるように構成されている(第1の態様)。
【0009】
第1の態様のシステムでは、ロボット搭載移動装置が作業を実行する前に、制御装置が作業情報及び状態情報を取得する。作業情報には作業に必要なエンドエフェクタの種類の情報が含まれ、状態情報にはロボット搭載移動装置が現在保持しているエンドエフェクタの種類の情報が含まれる。尚、ロボット搭載移動装置がエンドエフェクタを保持するとは、エンドエフェクタが装着部にのみ取り付けられている態様、一以上の積載部にのみ積載されている態様、並びに装着部及び一以上の積載部の両方に取り付け及び積載されている態様の総称である。制御装置は、作業情報及び状態情報に基づいてロボット搭載移動装置が作業の実行に必要なエンドエフェクタを現在保持しているか否かを把握する。仮に、作業に必要なエンドエフェクタが不足していた場合、制御装置はロボット搭載移動装置を貯蔵部へ移動させる。制御装置は、ロボット搭載移動装置が不足のエンドエフェクタを保持した後、ロボット搭載移動装置に作業を開始させる。すなわち、当該システムでは、ロボット搭載移動装置は、作業を実行する前に作業に必要なエンドエフェクタを予め準備する。そのため、ロボット搭載移動装置は、作業の途中でエンドエフェクタを交換するために貯蔵部へ移動しなくても、ロボット搭載移動装置上でエンドエフェクタを交換することができる。したがって、上記システムによれば、作業効率を向上させることができる。
【0010】
第1の態様のシステムにおいて、前記状態情報は、前記ロボット搭載移動装置が保持可能なエンドエフェクタの種類の情報を更に含み、前記動作制御部は、前記判別処理部において、前記ロボット搭載移動装置が前記作業に必要なエンドエフェクタの少なくとも一つを保持していないと判断された場合、空いている前記装着部及び前記積載部の数、並びに前記空いている装着部又は積載部が前記不足のエンドエフェクタに対応しているか否かを前記状態情報に基づいて判断し、空いている前記装着部又は前記積載部が有り、且つ、空いている前記装着部又は前記積載部が前記不足のエンドエフェクタに対応していると判断すると、前記準備作業を実行させるように構成されている態様(第2の態様)を採ることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人 東京大学
制御装置、および制御方法
1か月前
DMG森精機株式会社
生産システム、生産システムの制御方法、および生産システムの制御プログラム
5日前
DMG森精機株式会社
システム、ロボット搭載移動装置及びロボット搭載移動装置の動作の制御に用いられるプログラム
5日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
24日前
株式会社不二越
ロボット
2か月前
株式会社不二越
ロボット操作装置
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
川崎重工業株式会社
ロボット
2か月前
東京都公立大学法人
対象物把持装置
7日前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社デンソー
操縦桿
2か月前
株式会社アイエイアイ
グリッパー
13日前
庄内機械株式会社
釘打装置
11日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
住友重機械工業株式会社
ロボット
18日前
川崎重工業株式会社
制動システム
24日前
株式会社イノウ
給油口キャップ用開閉具
25日前
株式会社PILLAR
チューブ保持治具
3日前
株式会社不二越
垂直多関節ロボット
25日前
オークラ輸送機株式会社
ハンド装置
6日前
ARMA株式会社
UI付エンドエフェクタ
1か月前
芝浦機械株式会社
双腕ロボット
17日前
アイホン株式会社
ネジ締めカウントシステム
26日前
トヨタ自動車東日本株式会社
搬送治具
11日前
トヨタ自動車株式会社
荷姿影響緩和方法
14日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
25日前
パナソニック株式会社
工具
25日前
住友重機械工業株式会社
ロボット及びカバー
18日前
株式会社マキタ
電動工具
11日前
株式会社マキタ
作業機
1か月前
アピュアン株式会社
エアー式衝撃工具
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ