TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025048802
公報種別
公開特許公報(A)
公開日
2025-04-03
出願番号
2024162117
出願日
2024-09-19
発明の名称
制御装置、および制御方法
出願人
国立大学法人 東京大学
,
DMG森精機株式会社
代理人
個人
主分類
B23Q
5/22 20060101AFI20250326BHJP(工作機械;他に分類されない金属加工)
要約
【課題】ツインドライブ機構の駆動精度を従来よりも改善するための技術を提供する。
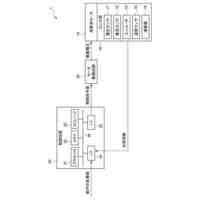
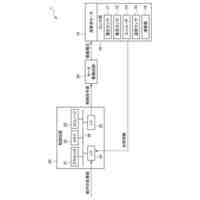
【解決手段】制御装置は、駆動機構は、第1,第2のモータと、第1,第2のモータの同時駆動によって同方向に駆動される駆動対象物とを備える。制御装置は、第1,第2のモータの角度に基づく重心位置の入力と、当該重心位置に対する目標位置の入力とを受け、当該重心位置を基準とする並進方向に係る電流指令値と、当該重心位置を基準とする回転方向に係る電流指令値とを生成する第1の制御部と、所定の変換行列に基づいて、並進方向に係る電流指令値と回転方向に係る電流指令値とを、第1,第2のモータ用の第1,第2の電流指令値に変換する変換部と、変換部による変換に伴う誤差を補正した上で、当該第1の電流指令値および当該第2の電流指令値のそれぞれを第1,第2のモータのそれぞれに出力する第2の制御部とを備える。
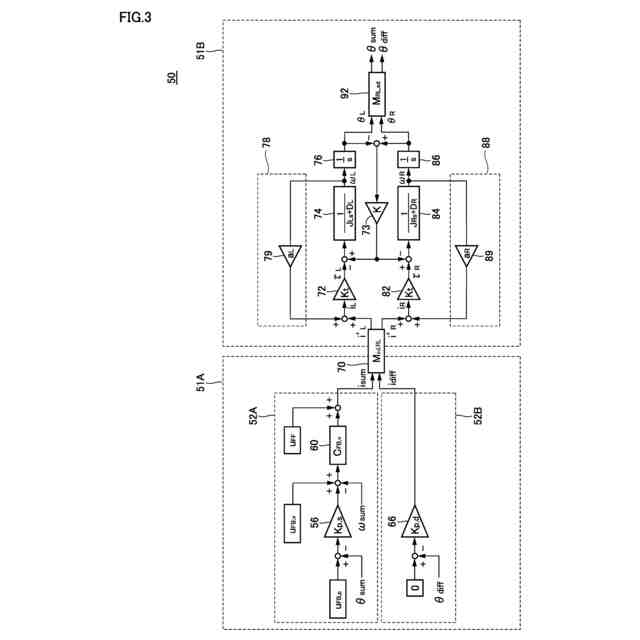
【選択図】図3
特許請求の範囲
【請求項1】
駆動機構の制御装置であって、
前記駆動機構は、
第1のモータと、
第2のモータと、
前記第1のモータおよび前記第2のモータの同時駆動によって同方向に駆動される駆動対象物とを備え、
前記制御装置は、
前記第1のモータの角度と前記第2のモータの角度とに基づく重心位置の入力と、当該重心位置に対する目標位置の入力とを受け、当該重心位置を基準とする並進方向に係る電流指令値と、当該重心位置を基準とする回転方向に係る電流指令値とを生成する第1の制御部と、
所定の変換行列に基づいて、前記並進方向に係る電流指令値と前記回転方向に係る電流指令値とを、前記第1のモータ用の第1の電流指令値と前記第2のモータ用の第2の電流指令値とに変換する変換部と、
前記変換部による変換に伴う誤差を補正した上で、当該第1の電流指令値および当該第2の電流指令値のそれぞれを前記第1のモータおよび前記第2のモータのそれぞれに出力する第2の制御部とを備える、制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記並進方向に係る電流指令値は、前記重心位置が前記目標位置に近付くように生成され、
前記回転方向に係る電流指令値は、前記第1のモータの角度と前記第2のモータの角度との差分値がゼロに近付くように生成される、請求項1に記載の制御装置。
【請求項3】
前記誤差を補正する処理は、
前記第1のモータの角速度に比例する第1の所定値を補正前の前記第1の電流指令値に加算する処理と、
前記第2のモータの角速度に比例する第2の所定値を補正前の前記第2の電流指令値に加算する処理とを含む、請求項1または2に記載の制御装置。
【請求項4】
前記第1の所定値は、前記第1のモータの角速度に第1の係数を掛けた値に相当し、
前記第2の所定値は、前記第2のモータの角速度に第2の係数を掛けた値に相当し、
前記第1の係数および前記第2の係数は、前記第1のモータのイナーシャおよび前記第2のモータのイナーシャの比と、前記第1のモータの粘性係数および前記第2のモータの粘性係数の比とが等しくなるように決められている、請求項3に記載の制御装置。
【請求項5】
前記第2の制御部は、さらに、
補正後の前記第1の電流指令値を前記第1のモータに出力したことに伴う前記第1のモータの第1の角度を算出する処理と、
補正後の前記第2の電流指令値を前記第2のモータに出力したことに伴う前記第2のモータの第2の角度を算出する処理と、
前記算出された第1の角度と、前記算出された第2の角度と、前記第1のモータの第1のイナーシャと、前記第2のモータの第2のイナーシャとに基づいて、前記重心位置を算出する処理と、
前記算出された重心位置を前記第1の制御部にフィードバックする処理とを実行する、請求項1または2に記載の制御装置。
【請求項6】
前記第1の制御部は、前記算出された第1の角度と、前記算出された第2の角度との差分値に対して所定の比例ゲインを掛けることで、前記回転方向に係る電流指令値を生成する、請求項5に記載の制御装置。
【請求項7】
請求項1または2に記載の制御装置と、
前記駆動機構とを備えた、工作機械。
【請求項8】
前記駆動対象物は、ワークまたは工具を回転可能に保持するための主軸である、請求項7に記載の工作機械。
【請求項9】
前記駆動対象物は、ワークを載置するためのテーブルである、請求項7に記載の工作機械。
【請求項10】
前記駆動対象物は、部材を搬送するためのローダである、請求項7に記載の工作機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、および制御方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
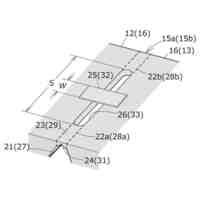
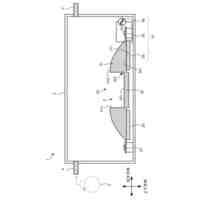
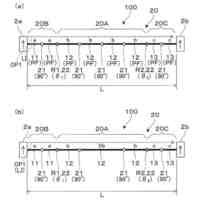
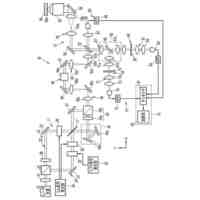
近年、工作機械の大型化が進んでいる。それに伴って、工作機械内における駆動対象の物体も大型化している。大型の物体を駆動するための機構として、ツインドライブ機構がある。ツインドライブ機構は、2つのモータで同方向に物体を駆動する機構である。
【0003】
ツインドライブ機構においては、各モータの駆動軸間に干渉力が働く。この干渉力は、加工精度の低下の原因となっている。この問題を解決するための手段として、非特許文献1は、駆動機構の制御モデルを並進方向と回転方向とに分離することで駆動軸間の非干渉化を図る手法を開示している。
【先行技術文献】
【非特許文献】
【0004】
R. Nakashima, S. Kaku, H. Honda, R. Oguro, H. Miyakawa, T. Tsuji: "The Position Control for Linear Slider with Twin Linear Drives", IEEJ Transactions on Industry Applications, Vol.123, No.3, pp.278-285 (2003)
【発明の概要】
【発明が解決しようとする課題】
【0005】
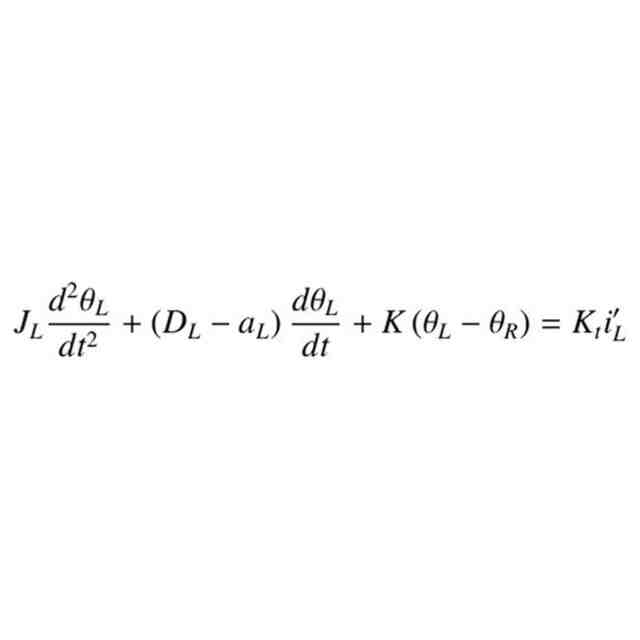
非特許文献1に開示される手法は、ツインドライブのリニアスライダを対象としている。また、当該手法においては、スライダの重量を並進方向の運動方程式の慣性とし、スライダのイナーシャを回転方向の運動方程式の慣性とするモデル化が行われている。これは、スライダを剛体と仮定する近似に基づいている。一方で、大型の物体の駆動制御においては、ツインドライブ機構の弾性が駆動精度に影響する。
【0006】
本開示は上述のような問題点を解決するためになされたものであって、ある局面における目的は、ツインドライブ機構の駆動精度を従来よりも改善するための技術を提供することである。
【課題を解決するための手段】
【0007】
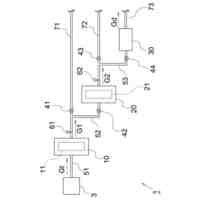
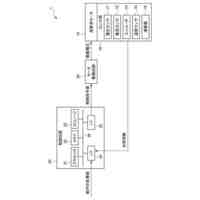
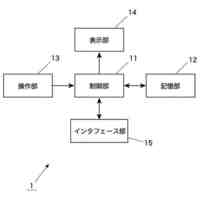
本開示の一例では、駆動機構の制御装置が提供される。上記駆動機構は、第1のモータと、第2のモータと、上記第1のモータおよび上記第2のモータの同時駆動によって同方向に駆動される駆動対象物とを備える。上記制御装置は、上記第1のモータの角度と上記第2のモータの角度とに基づく重心位置の入力と、当該重心位置に対する目標位置の入力とを受け、当該重心位置を基準とする並進方向に係る電流指令値と、当該重心位置を基準とする回転方向に係る電流指令値とを生成する第1の制御部と、所定の変換行列に基づいて、上記並進方向に係る電流指令値と上記回転方向に係る電流指令値とを、上記第1のモータ用の第1の電流指令値と上記第2のモータ用の第2の電流指令値とに変換する変換部と、上記変換部による変換に伴う誤差を補正した上で、当該第1の電流指令値および当該第2の電流指令値のそれぞれを上記第1のモータおよび上記第2のモータのそれぞれに出力する第2の制御部とを備える。
【0008】
本開示の一例では、上記並進方向に係る電流指令値は、上記重心位置が上記目標位置に近付くように生成される。上記回転方向に係る電流指令値は、上記第1のモータの角度と上記第2のモータの角度との差分値がゼロに近付くように生成される。
【0009】
本開示の一例では、上記誤差を補正する処理は、上記第1のモータの角速度に比例する第1の所定値を補正前の上記第1の電流指令値に加算する処理と、上記第2のモータの角速度に比例する第2の所定値を補正前の上記第2の電流指令値に加算する処理とを含む。
【0010】
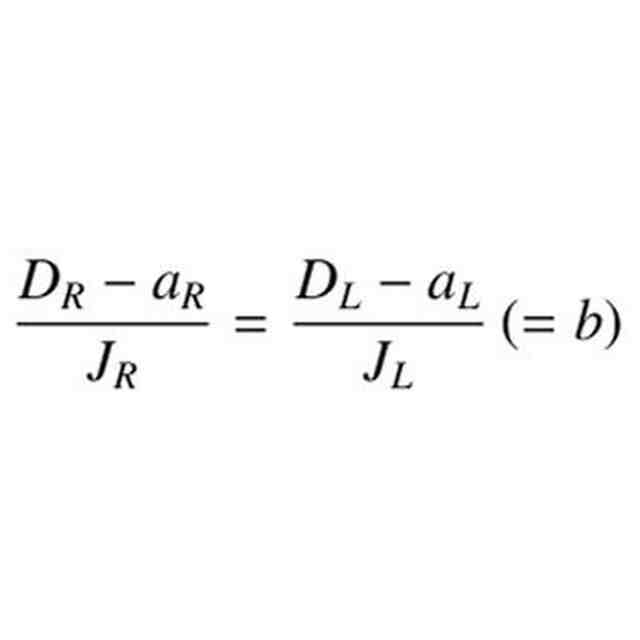
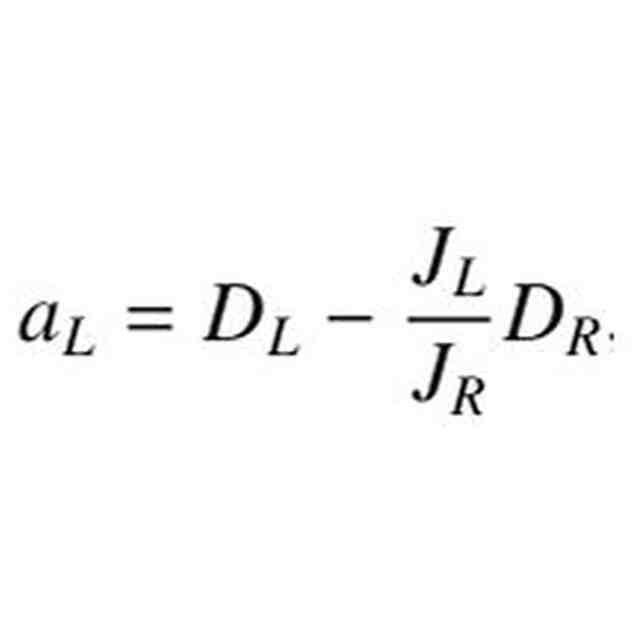
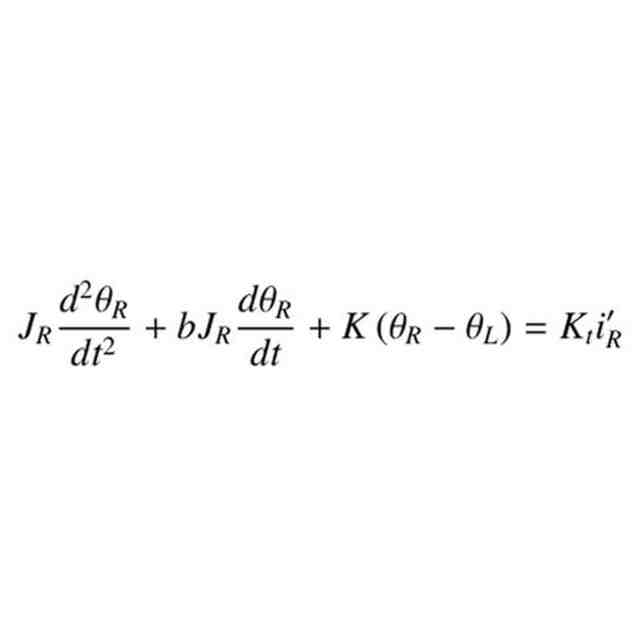
本開示の一例では、上記第1の所定値は、上記第1のモータの角速度に第1の係数を掛けた値に相当する。上記第2の所定値は、上記第2のモータの角速度に第2の係数を掛けた値に相当する。上記第1の係数および上記第2の係数は、上記第1のモータのイナーシャおよび上記第2のモータのイナーシャの比と、上記第1のモータの粘性係数および上記第2のモータの粘性係数の比とが等しくなるように決められている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人 東京大学
力センサ
18日前
国立大学法人 東京大学
プロペラ
7か月前
国立大学法人 東京大学
担持金属触媒
2か月前
国立大学法人 東京大学
ガス処理方法
1か月前
国立大学法人 東京大学
せん妄判定方法
3か月前
国立大学法人 東京大学
化学センサ用基材
6か月前
国立大学法人 東京大学
コンパレータ回路
2か月前
国立大学法人 東京大学
ビーム追従システム
1か月前
国立大学法人 東京大学
微粒子分離システム
6か月前
国立大学法人 東京大学
ソフトエクソスーツ
6か月前
国立大学法人 東京大学
超音波モータシステム
3か月前
国立大学法人 東京大学
振動変換器及び噴霧器
6か月前
国立大学法人 東京大学
超音波モータシステム
3か月前
国立大学法人 東京大学
光学装置及びレーザー
4か月前
国立大学法人 東京大学
超音波モータシステム
3か月前
国立大学法人 東京大学
結晶、及びその製造方法
3か月前
AGC株式会社
組成物
5か月前
国立大学法人 東京大学
推定装置、及びプログラム
2か月前
国立大学法人 東京大学
生分解性ポリマー複合材料
7か月前
国立大学法人 東京大学
テラヘルツ帯同期検波回路
3か月前
国立大学法人 東京大学
肝臓オルガノイド成熟培地
1か月前
国立大学法人 東京大学
読出回路及び磁気メモリ装置
2か月前
国立大学法人 東京大学
接着性細胞の浮遊培養用基材
1か月前
国立大学法人 東京大学
消化管幹細胞活性化用組成物
7か月前
NTT株式会社
圧力センサ
2か月前
国立大学法人 東京大学
嗅覚受容体の応答感度増強剤
4か月前
国立大学法人 東京大学
テラヘルツ波帯位相変調回路
3か月前
国立大学法人 東京大学
炭酸カルシウム結晶の製造方法
7か月前
国立大学法人 東京大学
蛍光測定装置及び蛍光測定方法
11日前
国立大学法人 東京大学
ドローンを用いた配送システム
1か月前
住友化学株式会社
原子力電池
5か月前
国立大学法人 東京大学
情報処理装置、及びプログラム
2か月前
国立大学法人 東京大学
酸化腐食抑制能を有する電解液
1か月前
ダイキン工業株式会社
冷凍装置
1か月前
国立大学法人 東京大学
ロボット及びロボットの投入方法
2日前
ダイキン工業株式会社
冷凍装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ