TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025067831
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2024172830
出願日
2024-10-01
発明の名称
プロペラ
出願人
国立大学法人 東京大学
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B64U
30/21 20230101AFI20250417BHJP(航空機;飛行;宇宙工学)
要約
【課題】複雑な機械機構を有さず、かつ受動的に変形するプロペラを提供する。
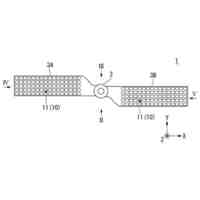
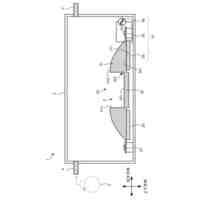
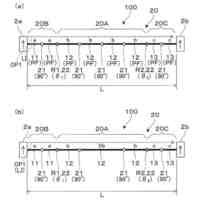
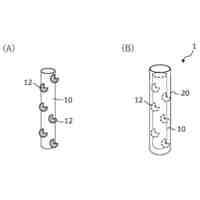
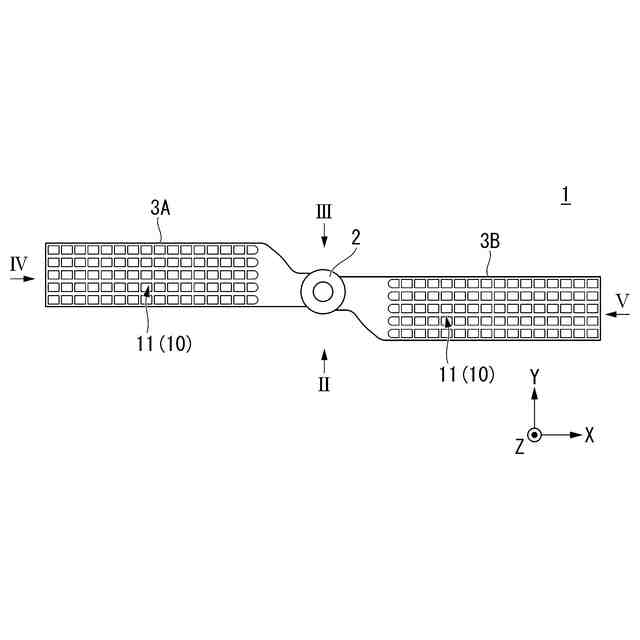
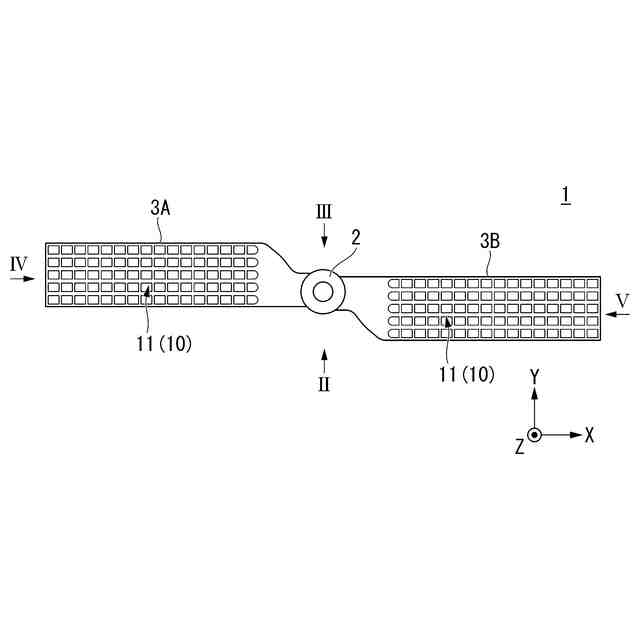
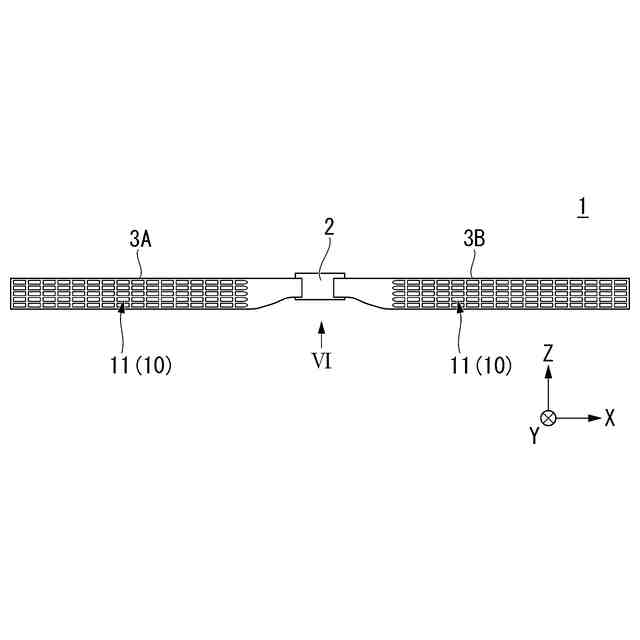
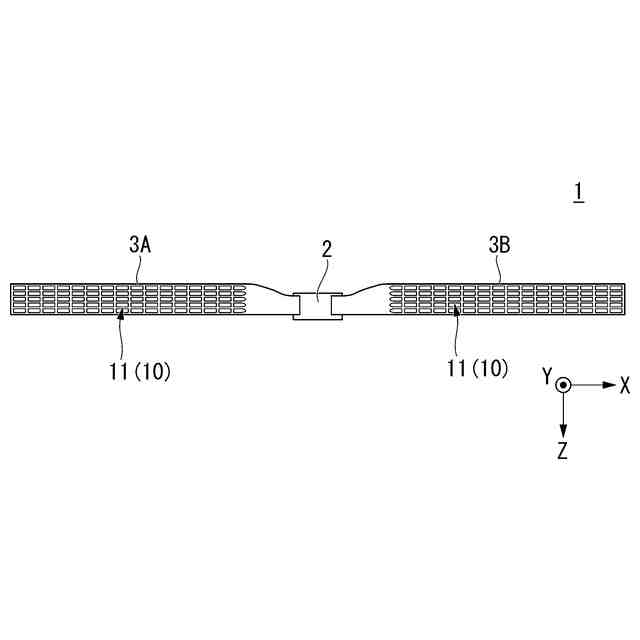
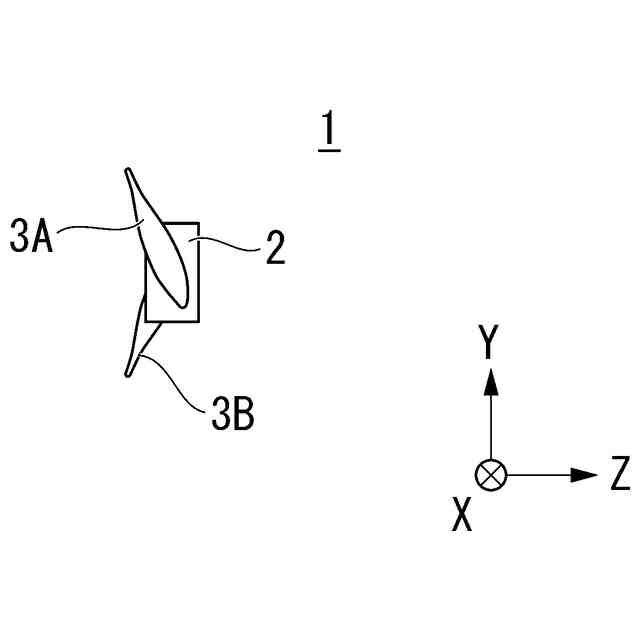
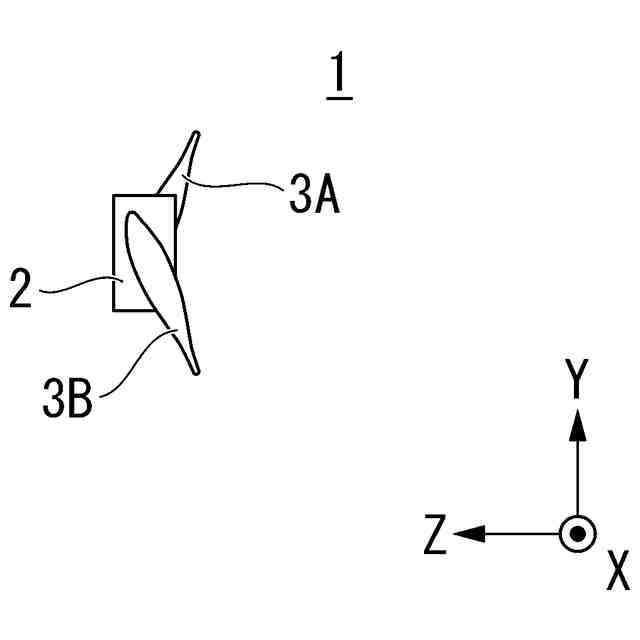
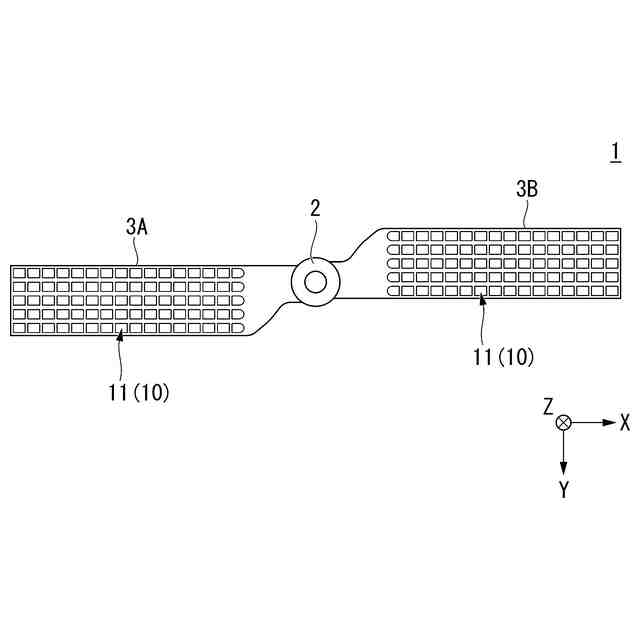
【解決手段】プロペラは、ハブと、前記ハブに接続された複数のブレードと、を備えるプロペラ(但し、ピッチを変更するための機械機構を備えるプロペラを除く。)であって、前記複数のブレードの各々は、空力の作用を受けてピッチを変更可能に構成されたコンプライアントメカニズム部を備える。
【選択図】図1
特許請求の範囲
【請求項1】
ハブと、
前記ハブに接続された複数のブレードと、を備えるプロペラ(但し、ピッチを変更するための機械機構を備えるプロペラを除く。)であって、
前記複数のブレードの各々は、空力の作用を受けてピッチを変更可能に構成されたコンプライアントメカニズム部を備える、
プロペラ。
続きを表示(約 250 文字)
【請求項2】
前記コンプライアントメカニズム部は、ラティス構造を含む、
請求項1に記載のプロペラ。
【請求項3】
前記ラティス構造は、前記ブレードの全体に設けられる、
請求項2に記載のプロペラ。
【請求項4】
前記ラティス構造は、前記ブレードの根本部分にのみ設けられる、
請求項2に記載のプロペラ。
【請求項5】
前記ラティス構造は、前記ブレードの形状に沿って並ぶ複数の立方体構造を含む、
請求項2に記載のプロペラ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、プロペラに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年、電動無人航空機 (UAV; Unmanned Aerial Vehicle) が民間で広く使用されるようになり、大規模な航空写真撮影や物流への応用が期待されている。電動UAVには、マルチコプター、固定翼、ハイブリッド型など、さまざまな形式がある。そのほとんどはプロペラを使用して推力を生成するため、プロペラの性能を向上させることが要求されている。特定の巡航条件の性能要件を満たすために、いくつかのプロペラ設計方法が考案されているが、巡航条件と他の条件の間には性能のトレードオフがある。可変ピッチプロペラは、飛行条件に応じてプロペラのピッチ(ねじり分布)を変更するプロペラ性能のトレードオフを改善する。このプロペラは、プロペラブレードに搭載した機械機構をサーボモータで制御することで、UAV規模のプロペラとして実用化されている。これまでの研究では、電子制御を必要とせず、飛行中の空気力を利用した受動的なピッチ変更により、飛行中常に最適なピッチ角を維持できることが示されている(非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0003】
Heinzen, S. B., Hall, C. E. Jr., and Gopalarathnam, A.: Development and Testing of a Pas-sive Variable-Pitch Propeller, JOURNAL OF AIRCRAFT, Vol. 52, No.3, May-June 2015
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献1のパッシブ可変ピッチプロペラは、空気力学的ねじりモーメントを考慮してプロペラを設計することで考案された。しかし、ピッチ制御システムには依然として機械的な可変システムが必要である。そのため、複雑な機械機構を有さず、かつ受動的に変形するプロペラが望まれている。
【0005】
そこで本発明は、複雑な機械機構を有さず、かつ受動的に変形するプロペラを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題の解決手段として、本開示の態様は以下の構成を有する。
(1)本開示の態様に係るプロペラは、ハブと、前記ハブに接続された複数のブレードと、を備えるプロペラ(但し、ピッチを変更するための機械機構を備えるプロペラを除く。)であって、前記複数のブレードの各々は、空力の作用を受けてピッチを変更可能に構成されたコンプライアントメカニズム部を備える。
【0007】
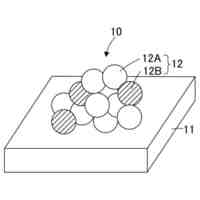
(2)上記(1)に記載のプロペラでは、前記コンプライアントメカニズム部は、ラティス構造を含んでもよい。
【0008】
(3)上記(2)に記載のプロペラでは、前記ラティス構造は、前記ブレードの全体に設けられてもよい。
【0009】
(4)上記(2)に記載のプロペラでは、前記ラティス構造は、前記ブレードの根本部分にのみ設けられてもよい。
【0010】
(5)上記(2)に記載のプロペラでは、前記ラティス構造は、前記ブレードの形状に沿って並ぶ複数の立方体構造を含んでもよい。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人 東京大学
プロペラ
6か月前
国立大学法人 東京大学
担持金属触媒
1か月前
国立大学法人 東京大学
ガス処理方法
1か月前
国立大学法人 東京大学
せん妄判定方法
2か月前
国立大学法人 東京大学
化学センサ用基材
5か月前
国立大学法人 東京大学
コンパレータ回路
1か月前
国立大学法人 東京大学
ソフトエクソスーツ
6か月前
国立大学法人 東京大学
ビーム追従システム
1か月前
国立大学法人 東京大学
微粒子分離システム
5か月前
国立大学法人 東京大学
振動変換器及び噴霧器
5か月前
国立大学法人 東京大学
超音波モータシステム
2か月前
国立大学法人 東京大学
超音波モータシステム
2か月前
国立大学法人 東京大学
超音波モータシステム
2か月前
国立大学法人 東京大学
光学装置及びレーザー
4か月前
AGC株式会社
組成物
4か月前
国立大学法人 東京大学
粘性の測定装置及び方法
7か月前
国立大学法人 東京大学
結晶、及びその製造方法
3か月前
国立大学法人 東京大学
テラヘルツ帯同期検波回路
2か月前
国立大学法人 東京大学
肝臓オルガノイド成熟培地
1か月前
国立大学法人 東京大学
推定装置、及びプログラム
1か月前
国立大学法人 東京大学
生分解性ポリマー複合材料
6か月前
国立大学法人 東京大学
制御装置、および制御方法
7か月前
国立大学法人 東京大学
テラヘルツ波帯位相変調回路
2か月前
国立大学法人 東京大学
読出回路及び磁気メモリ装置
1か月前
国立大学法人 東京大学
接着性細胞の浮遊培養用基材
1か月前
NTT株式会社
圧力センサ
1か月前
国立大学法人 東京大学
嗅覚受容体の応答感度増強剤
3か月前
国立大学法人 東京大学
消化管幹細胞活性化用組成物
6か月前
国立大学法人 東京大学
炭酸カルシウム結晶の製造方法
6か月前
国立大学法人 東京大学
ドローンを用いた配送システム
1か月前
住友化学株式会社
原子力電池
5か月前
国立大学法人 東京大学
情報処理装置、及びプログラム
2か月前
国立大学法人 東京大学
酸化腐食抑制能を有する電解液
11日前
ダイキン工業株式会社
冷凍装置
11日前
ダイキン工業株式会社
冷凍装置
11日前
国立大学法人 東京大学
光デバイス及びコヒーレント受信器
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ