TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025025987
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023131297
出願日
2023-08-10
発明の名称
情報処理方法、コンピュータプログラム及び情報処理装置
出願人
大日本印刷株式会社
代理人
個人
,
個人
主分類
B65G
47/86 20060101AFI20250214BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】搬送装置の保持部の位置調整を容易化する情報処理方法、コンピュータプログラム及び情報処理装置を提供する。
【解決手段】本実施の形態に係る情報処理方法は、物品を保持する複数の保持部を有する第1の搬送装置と、前記物品を保持する複数の保持部を有する第2の搬送装置との間で前記物品を搬送する搬送システムについて前記保持部の位置を調整するための情報処理方法であって、情報処理装置が、前記第1の搬送装置についてセンサから各保持部までの距離を測定した第1センサ距離の情報を取得し、取得した複数の前記第1センサ距離から最大値及び最小値を特定し、前記第2の搬送装置についてセンサから各保持部までの距離を測定した第2センサ距離の情報を取得し、前記第1センサ距離の最大値、前記第1センサ距離の最小値及び前記第2センサ距離を基に、前記保持部の調整量を算出する。
【選択図】図5
特許請求の範囲
【請求項1】
物品を保持する複数の保持部を有する第1の搬送装置と、前記物品を保持する複数の保持部を有する第2の搬送装置との間で前記物品を搬送する搬送システムについて前記保持部の位置を調整するための情報処理方法であって、
情報処理装置が、
前記第1の搬送装置についてセンサから各保持部までの距離を測定した第1センサ距離の情報を取得し、
取得した複数の前記第1センサ距離から最大値及び最小値を特定し、
前記第2の搬送装置についてセンサから各保持部までの距離を測定した第2センサ距離の情報を取得し、
前記第1センサ距離の最大値、前記第1センサ距離の最小値及び前記第2センサ距離を基に、前記保持部の調整量を算出する、
情報処理方法。
続きを表示(約 1,500 文字)
【請求項2】
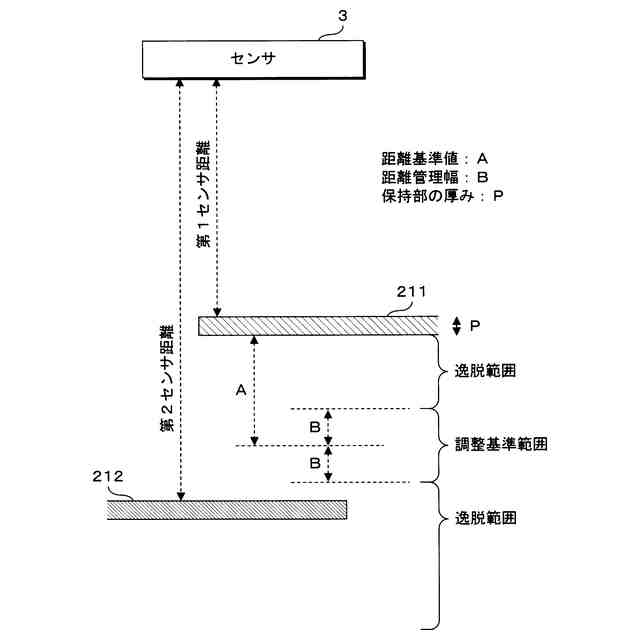
前記第1の搬送装置の保持部に対する前記第2の搬送装置の保持部の距離基準値を取得し、
前記距離基準値に対して許容される距離管理幅を取得し、
前記距離基準値、前記距離管理幅、前記第1センサ距離の最大値、前記第1センサ距離の最小値及び前記第2センサ距離を基に、前記保持部の調整量を算出する、
請求項1に記載の情報処理方法。
【請求項3】
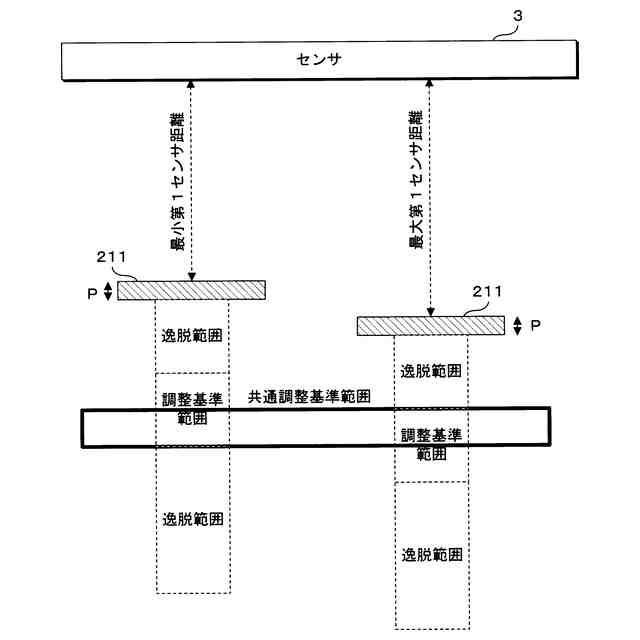
前記距離基準値及び前記距離管理幅に基づき、前記第1センサ距離が最大値の保持部及び最小値の保持部について調整基準範囲をそれぞれ算出し、
前記第1センサ距離が最大値の保持部についての調整基準範囲と前記第1センサ距離が最小値の保持部についての調整基準範囲との共通調整基準範囲を算出し、
前記第2センサ距離を基に、前記第2の搬送装置の保持部が前記共通調整基準範囲内となるように、前記保持部の調整量を算出する、
請求項2に記載の情報処理方法。
【請求項4】
前記共通調整基準範囲が存在しない場合、前記第1センサ距離が最大値の保持部についての逸脱範囲と前記第1センサ距離が最小値の保持部についての逸脱範囲との共通最小逸脱範囲を算出し、
前記第2の搬送装置の保持部が前記共通最小逸脱範囲内となるように、前記保持部の調整量を算出する、
請求項3に記載の情報処理方法。
【請求項5】
前記保持部は、2つの爪部で前記物品を保持し、
前記保持部の爪部毎に調整量を算出する、
請求項1に記載の情報処理方法。
【請求項6】
第1の搬送装置の保持部と第2の搬送装置の保持部との上下関係に関する情報を取得し、
取得した前記情報に基づいて調整量を算出する、
請求項1に記載の情報処理方法。
【請求項7】
前記物品を授受する前記第1の搬送装置の保持部と前記第2の搬送装置の保持部との組み合わせに関する情報を取得し、
前記組み合わせ毎に、前記共通調整基準範囲の算出及び前記調整量の算出を行う、
請求項3に記載の情報処理方法。
【請求項8】
前記第1の搬送装置の保持部について測定された第1センサ距離及び前記第2の搬送装置の保持部について測定された第2センサ距離を示すグラフ、又は、算出した前記第2の搬送装置の保持部の調整量に関する情報を表示部に表示する、
請求項1に記載の情報処理方法。
【請求項9】
前記センサは各保持部までの距離を複数回測定し、
複数回の測定結果の統計値を前記第1センサ距離又は前記第2センサ距離として扱う、
請求項1に記載の情報処理方法。
【請求項10】
コンピュータに、物品を保持する複数の保持部を有する第1の搬送装置と、前記物品を保持する複数の保持部を有する第2の搬送装置との間で前記物品を搬送する搬送システムについて前記保持部の位置を調整するための情報処理を実施させるコンピュータプログラムであって、
前記コンピュータに、
前記第1の搬送装置についてセンサから各保持部までの距離を測定した第1センサ距離の情報を取得し、
取得した複数の前記第1センサ距離から最大値及び最小値を特定し、
前記第2の搬送装置についてセンサから各保持部までの距離を測定した第2センサ距離の情報を取得し、
前記第1センサ距離の最大値、前記第1センサ距離の最小値及び前記第2センサ距離を基に、前記保持部の調整量を算出する
処理を実施させる、コンピュータプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送装置の保持部の位置を調整するための情報処理方法、コンピュータプログラム及び情報処理装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1においては、複数の搬送装置の間で物品の保持位置を調整する調整方法が提案されている。この調整方法では、まず、第1搬送装置の複数の保持部の中から代表保持部を決定し、保持部が移動している間に各保持部について代表保持部に対する偏差を非接触の距離センサを用いて連続的に測定し、各保持部について測定された偏差に基づいて代表保持部に対する位置を調整する。次いで、第2搬送装置の複数の保持部の中から代表保持部を決定し、第2搬送装置の代表保持部について第1搬送装置の代表保持部に対する位置を調整し、第2搬送装置の保持部が移動している間に各保持部の各々についての代表保持部に対する偏差を非接触の距離センサを用いて連続的に測定し、各保持部について測定された偏差に基づいて代表保持部に対する位置を調整する。
【先行技術文献】
【特許文献】
【0003】
特開2022-94070号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
飲料の充填ラインなどでは、搬送装置が飲料の容器を保持部で保持して搬送する。搬送装置において保持部による対象物品の保持位置が適切でない場合、搬送する対象物品の破損又は搬送装置自身の保持部の破損等が生じ得る。これらを避けるために、搬送装置の保持部の位置調整が定期的に行われる必要がある。位置調整の作業は作業員等による手作業で行われており、調整の作業には多大な時間を要する。多大な時間を要することから搬送装置が有する複数の保持部について、その全ての位置調整を行うことが難しい場合もある。
【0005】
本発明は、斯かる事情に鑑みてなされたものであって、その目的とするところは、搬送装置の保持部の位置調整を容易化する情報処理方法、コンピュータプログラム及び情報処理装置を提供することにある。
【課題を解決するための手段】
【0006】
一実施形態に係る情報処理方法は、物品を保持する複数の保持部を有する第1の搬送装置と、前記物品を保持する複数の保持部を有する第2の搬送装置との間で前記物品を搬送する搬送システムについて前記保持部の位置を調整するための情報処理方法であって、情報処理装置が、前記第1の搬送装置についてセンサから各保持部までの距離を測定した第1センサ距離の情報を取得し、取得した複数の前記第1センサ距離から最大値及び最小値を特定し、前記第2の搬送装置についてセンサから各保持部までの距離を測定した第2センサ距離の情報を取得し、前記第1センサ距離の最大値、前記第1センサ距離の最小値及び前記第2センサ距離を基に、前記保持部の調整量を算出する。
【発明の効果】
【0007】
一実施形態による場合は、搬送装置の保持部の位置調整を容易化できる。
【図面の簡単な説明】
【0008】
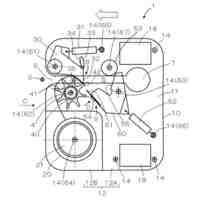
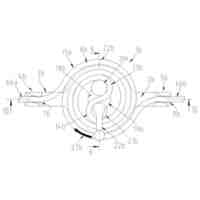
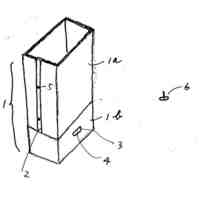
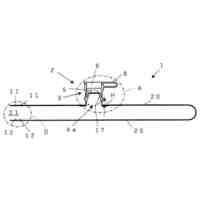
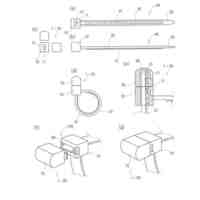
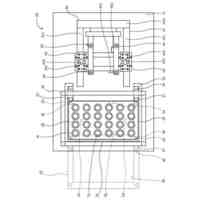
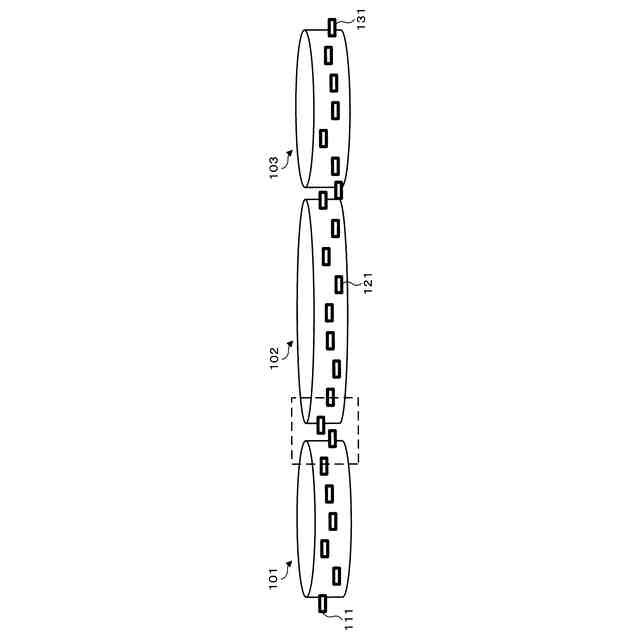
本実施の形態に係る情報処理システムが扱う搬送システムの一例を説明するための模式図である。
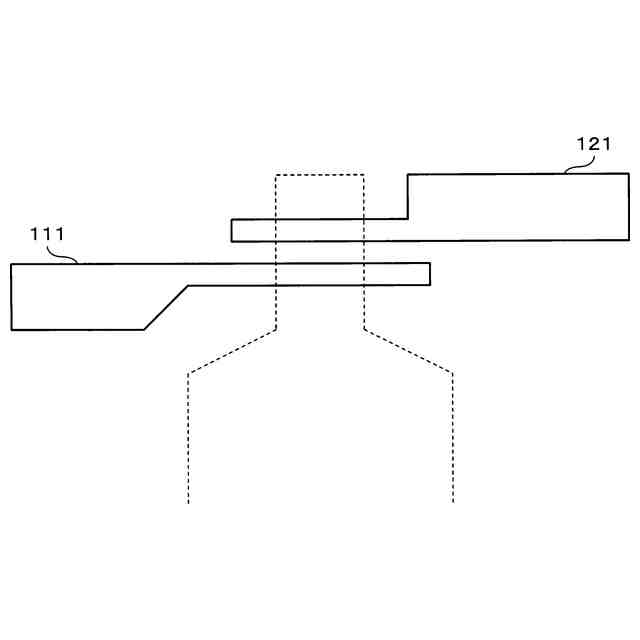
本実施の形態に係る情報処理システムが扱う搬送システムの一例を説明するための模式図である。
本実施の形態に係る情報処理システムが扱う搬送システムの一例を説明するための模式図である。
本実施の形態に係る情報処理システムが扱う搬送システムの一例を説明するための模式図である。
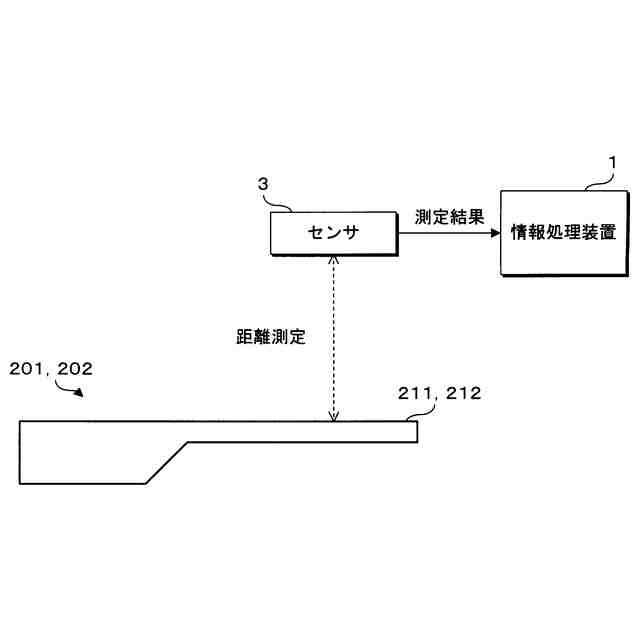
本実施の形態に係る情報処理システムの概略を説明するための模式図である。
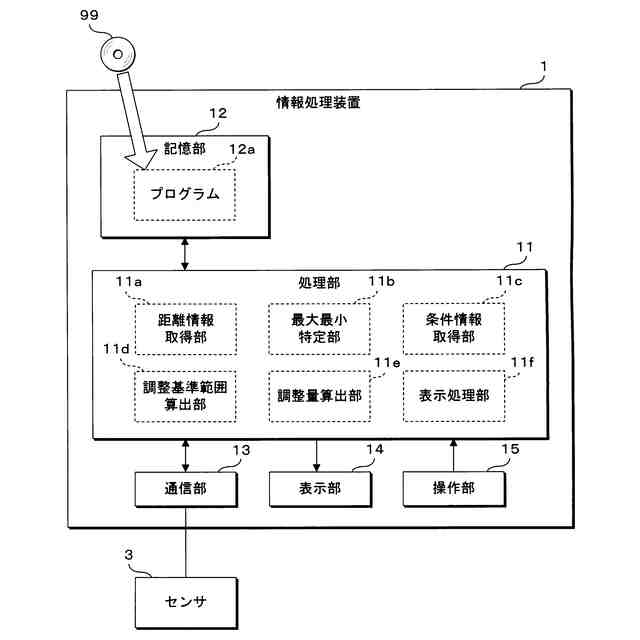
本実施の形態に係る情報処理装置の一構成例を示すブロック図である。
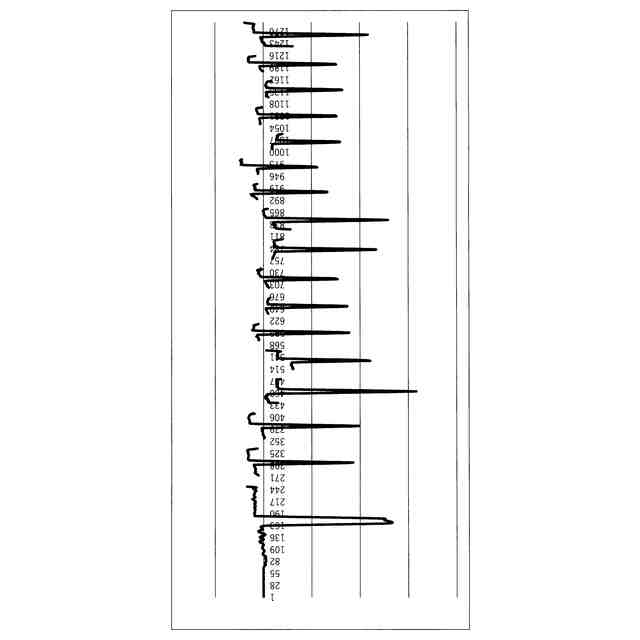
センサ3による測定結果の一例を示すグラフである。
距離基準値及び距離管理幅を説明するための模式図である。
共通調整基準範囲を説明するための模式図である。
共通最小逸脱範囲を説明するための模式図である。
本実施の形態に係る情報処理装置が行う調整量算出処理の手順の一例を示すフローチャートである。
情報処理装置が表示する調整情報画面の一例を示す模式図である。
グラフ表示の一例を示す模式図である。
調整量の一表示例を示す模式図である。
【発明を実施するための形態】
【0009】
本発明の実施形態に係る情報処理システムの具体例を、以下に図面を参照しつつ説明する。なお、本発明はこれらの例示に限定されるものではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
【0010】
<搬送システム>
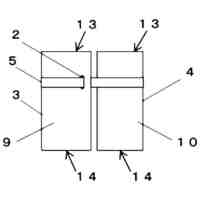
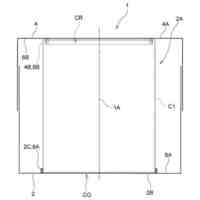
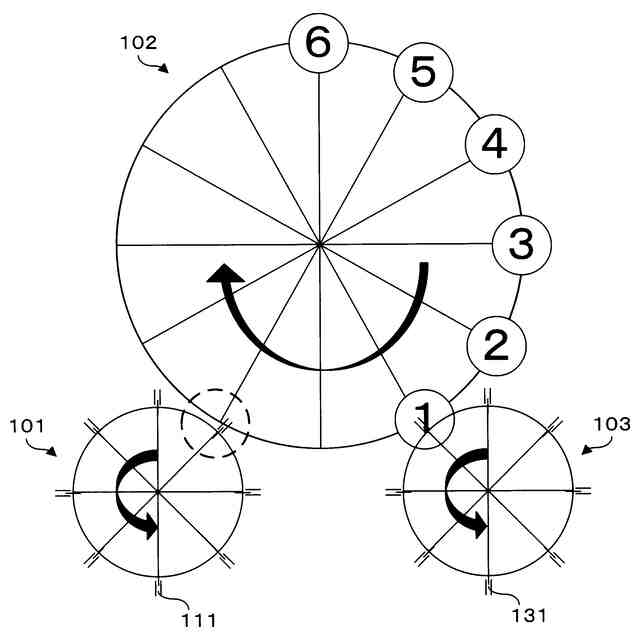
図1~図4は、本実施の形態に係る情報処理システムが扱う搬送システムの一例を説明するための模式図である。なお図1には、搬送システムの平面視の構成が模式的に示されている。また図2には、搬送システムの側面視の構成が模式的に示されている。本実施の形態に係る搬送システムは、3つの搬送装置101~103を備えている。各搬送装置101~103は、例えば円盤状の回転体の外周部に、周方向へ等間隔に複数の保持部を設けた構成である。各搬送装置101~103は、各保持部に例えば飲料容器などの対象物品を保持し、図示しないモータ等により回転体を回転させることで、保持部に保持した対象物品を搬送することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
箱
4か月前
個人
ゴミ箱
4か月前
個人
包装体
4か月前
個人
収納用具
8か月前
個人
容器
1か月前
個人
物品収納具
8か月前
個人
折り畳み水槽
4か月前
個人
パウチ補助具
4か月前
個人
土嚢運搬器具
10日前
個人
ダンボール宝箱
5か月前
個人
閉塞装置
1か月前
個人
コード類収納具
2日前
個人
掃除楽々ゴミ箱
9か月前
個人
圧縮収納袋
5か月前
株式会社和気
包装用箱
24日前
個人
ゴミ処理機
1か月前
三甲株式会社
容器
7か月前
積水樹脂株式会社
接着剤
9か月前
個人
包装箱
1か月前
個人
塗料容器用蓋
4か月前
三甲株式会社
容器
6か月前
個人
粘着テープ剥がし具
5か月前
個人
粘着テープ剥がし具
9か月前
個人
粘着テープ切断装置
6か月前
株式会社イシダ
箱詰装置
7か月前
株式会社新弘
容器
4か月前
株式会社新弘
容器
4か月前
三甲株式会社
蓋体
1か月前
積水樹脂株式会社
接着剤
4か月前
株式会社イシダ
包装装置
4か月前
三甲株式会社
トレー
9か月前
三菱製紙株式会社
包装用紙
6か月前
個人
蓋付結束バンド
6か月前
株式会社デュプロ
包装装置
4か月前
日東精工株式会社
供給装置
1か月前
個人
ゴミ箱用ゴミ袋保持具
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ