TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025020633
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124131
出願日
2023-07-31
発明の名称
監視システム、監視方法および監視プログラム
出願人
株式会社テラ・ラボ
代理人
個人
,
個人
,
個人
,
個人
主分類
B64D
45/00 20060101AFI20250205BHJP(航空機;飛行;宇宙工学)
要約
【課題】監視機からのデータ回収を迅速に行う。
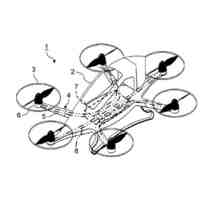
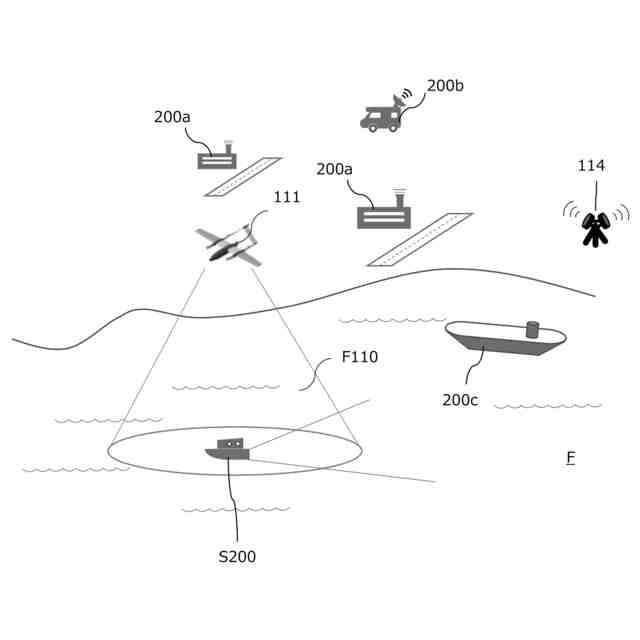
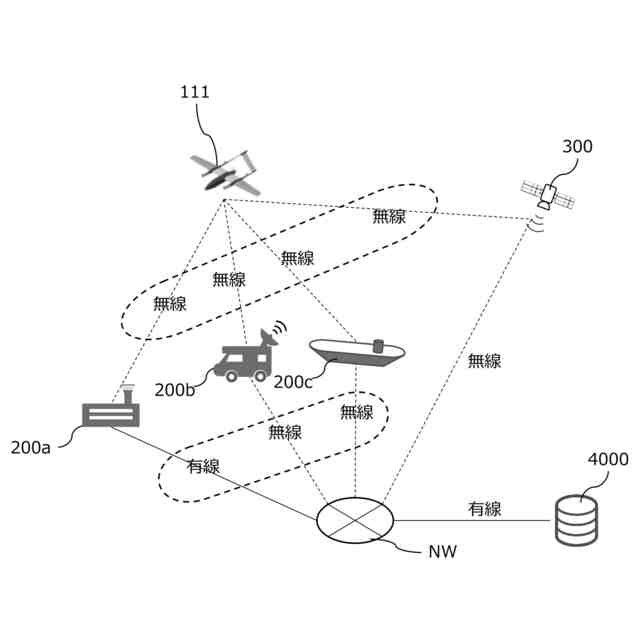
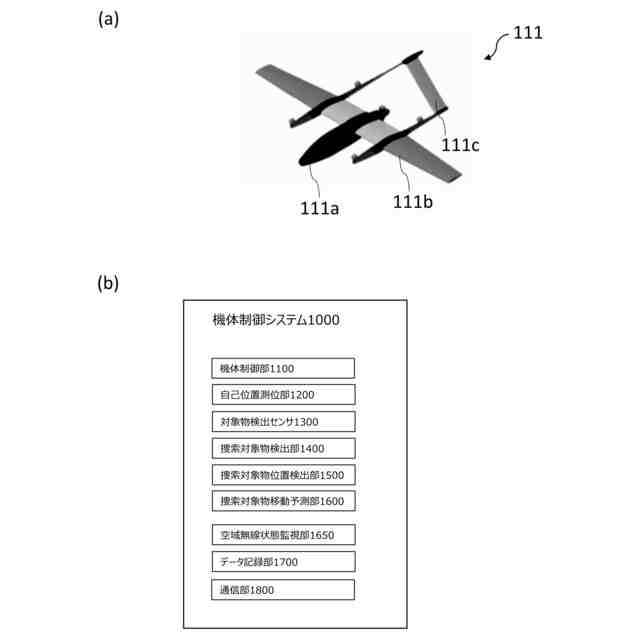
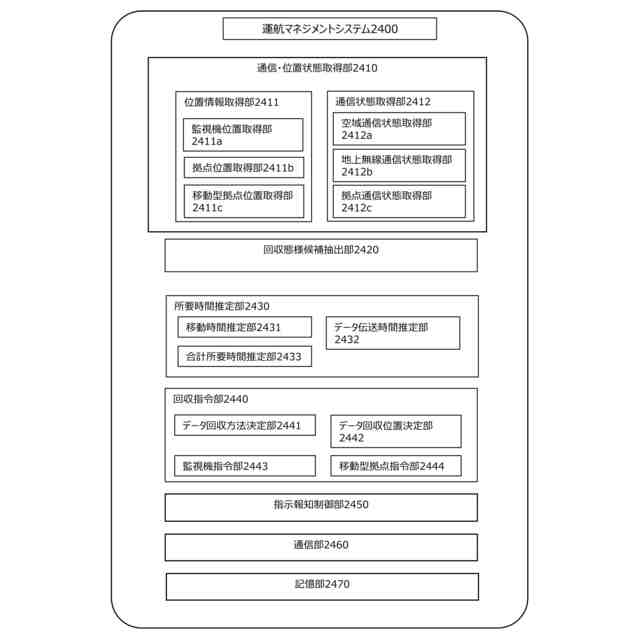
【解決手段】監視対象領域Fにおける捜索対象物を捜索する監視機110と、監視機に搭載され、捜索対象物を検出する捜索対象物検出部1400と、監視機が捜索対象物を検出した場合に、監視機に蓄積される取得データを着陸又は無線通信により回収するデータ回収位置を決定又は提案するデータ回収位置決定部2442と、を備える監視システム1。
【選択図】図5
特許請求の範囲
【請求項1】
監視対象領域における捜索対象物を捜索する監視機 と、
前記監視機に搭載され、前記捜索対象物を検出する捜索対象物検出部と、
前記監視機が前記捜索対象物を検出した場合に、前記監視機に蓄積される取得データを着陸又は無線通信により回収するデータ回収位置を決定または提案 するデータ回収位置決定部と、
を備える監視システム。
続きを表示(約 1,700 文字)
【請求項2】
前記取得データを回収する設備を備えた移動型拠点と、
前記データ回収位置決定部の決定した、又は前記データ回収位置決定部の提案に対してユーザが決定した前記データ回収位置まで前記移動型拠点を移動させる移動型拠点指令部と、
をさらに備える、
請求項1記載の監視システム。
【請求項3】
前記データ回収位置決定部は、前記監視機の位置と、前記移動型拠点の位置とに基づいて、前記監視機および前記移動型拠点の移動所要時間が略均等となる位置を前記データ回収位置として決定又は提案する、
請求項2記載の監視システム。
【請求項4】
前記データ回収位置決定部は、前記監視機が前記無線通信により前記取得データを送信する場合に、前記無線通信の通信強度又は通信速度のいずれかが所定条件よりも大きい領域を前記データ回収位置として決定又は提案する、
請求項2記載の監視システム。
【請求項5】
前記移動型拠点は、前記取得データを解析する解析部 と無線通信により接続され、
前記データ回収位置決定部は、前記移動型拠点と前記解析部とを接続する前記無線通信の通信強度又は通信速度のいずれかが所定の閾値よりも大きい領域を前記データ回収位置として決定又は提案する、
請求項2記載の監視システム。
【請求項6】
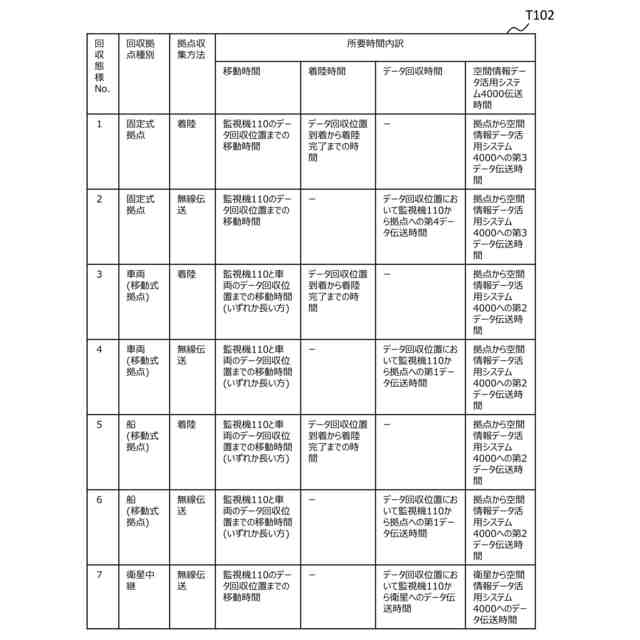
前記監視機および前記移動型拠点の前記データ回収位置までの移動時間を推定する移動時間推定部と、
前記データ回収位置における前記監視機から前記移動型拠点への第1データ伝送時間を推定するデータ伝送時間推定部をさらに備え、
前記データ回収位置決定部は、前記移動時間および前記第1データ伝送時間の合計が最短となる前記データ回収位置を決定又は提案する、
請求項2記載の監視システム。
【請求項7】
前記移動型拠点は、前記取得データを解析する解析部と無線通信により接続され、
前記データ伝送時間推定部は、前記移動型拠点から前記解析部までの第2データ伝送時間を予測し、
前記データ回収位置決定部は、前記移動時間、前記第1データ伝送時間および前記第2データ伝送時間の合計が最短となる前記データ回収位置を決定又は提案する、
請求項6記載の監視システム。
【請求項8】
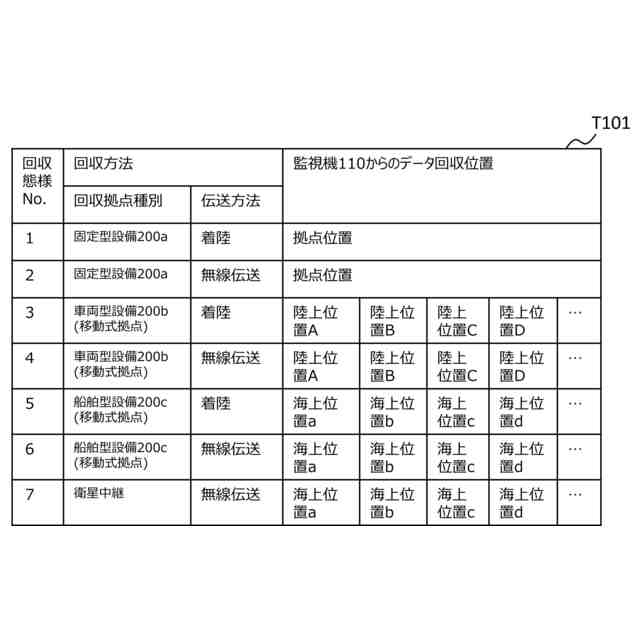
前記監視機から前記拠点に取得データを伝送する回収態様として、前記監視機を前記拠点に着陸させることにより前記取得データを回収するか、前記監視機から拠点に無線伝送により取得データを送信するか、を決定又は提案するデータ回収方法決定部をさらに備え、
前記移動時間推定部は、前記監視機が前記拠点に着陸する場合に着陸に要する着陸時間を、前記監視機が前記データ回収位置まで移動する時間に合算して前記移動時間を算出し、
前記データ回収方法決定部は、前記移動時間および前記第1データ伝送時間の合計が最短となる回収態様を決定又は提案する、
請求項6記載の監視システム。
【請求項9】
前記取得データを回収する設備を備えた拠点と、
あらかじめ設定された前記データ回収位置の候補から複数の候補位置を抽出する回収態様候補抽出部と、
をさらに備え、
前記データ回収位置決定部は、前記候補位置の中から、前記監視機から前記拠点への前記無線通信の通信強度又は通信速度の少なくともいずれかが所定の第2閾値よりも大きい候補位置を抽出し、前記データ回収位置として決定又は提案する、
請求項1記載の監視システム。
【請求項10】
前記拠点は固定型拠点であり、前記取得データを解析する解析部と無線通信により接続され、
前記拠点から前記解析部までの第3データ伝送時間と、を推定する第2データ伝送時間推定部をさらに備え、
前記データ回収位置決定部は、少なくとも前記第3データ伝送時間が、前記候補位置の中で最短となる前記データ回収位置を決定又は提案する、
請求項9記載の監視システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、監視システム、監視方法および監視プログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、航空機のレーダによって不審船を発見し、船からの発信データにより不審船候補を特定した上で、不審船候補に接近して画像を取得する技術が開示されている。このシステムでは、画像から不審船の外見特徴が認められる場合には外部装置にその旨を送信する。
【先行技術文献】
【特許文献】
【0003】
特開2020-101973号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
不法行為の監視又は人命救助に資するため、海域又は空域等を監視する技術が知られている。監視機が不審船又は不審な航空機といった不審物、あるいは遭難船等の捜索対象物を発見した場合には、捜索対象物の分析結果に基づく適切な対応を迅速に行うために、監視機が取得した捜索対象物に関する情報を迅速に回収する必要がある。画像や映像等データ量の大きい情報を回収するにあたっては、海域又は空域では設備等の問題により通信速度が遅く実用に耐えない場合がある。また、通信状況は環境等の影響を受けるため、状況によっては、通信により多くの時間を要してしまうおそれがあった。
【0005】
この点、特許文献1記載のシステムでは、取得された情報を分析装置に迅速に入力することはできなかった。
【0006】
本発明は上記のような課題を考慮してなされたものであり、監視機からのデータ回収を迅速に行うことができる監視システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の一の観点に係る監視システムは、監視対象領域における捜索対象物を捜索する監視機と、前記監視機に搭載され、前記捜索対象物を検出する捜索対象物検出部と、前記監視機が前記捜索対象物を検出した場合に、前記監視機に蓄積される取得データを着陸又は無線通信により回収するデータ回収位置を決定または提案するデータ回収位置決定部と、を備える。
【0008】
前記取得データを回収する設備を備えた移動型拠点と、前記データ回収位置決定部の決定した、又は前記データ回収位置決定部の提案に対してユーザが決定した前記データ回収位置まで前記移動型拠点を移動させる移動型拠点指令部と、をさらに備えるものとしてもよい。
【0009】
前記データ回収位置決定部は、前記監視機の位置と、前記移動型拠点の位置とに基づいて、前記監視機および前記移動型拠点の移動所要時間が略均等となる位置を前記データ回収位置として決定又は提案するものとしてもよい。
【0010】
前記データ回収位置決定部は、前記監視機が前記無線通信により前記取得データを送信する場合に、前記無線通信の通信強度又は通信速度のいずれかが所定条件よりも大きい領域を前記データ回収位置として決定又は提案するものとしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
26日前
個人
ドローンシステム
2か月前
個人
空港用貨物搬送車
10か月前
株式会社三圓
浮上装置
6か月前
個人
垂直離着陸機用エンジン改
2か月前
個人
ドローンの計測操作方法2
6か月前
個人
ドローンの計測操作方法3
6か月前
個人
飛行艇
8か月前
キヤノン電子株式会社
磁気トルカ
7か月前
個人
人工衛星推進材循環エンジン
11か月前
個人
マルチコプター型電気飛行機
11か月前
個人
空中移動システム
3か月前
個人
ドローンを自動離着陸する方法
2か月前
個人
ドローン消音装置
5か月前
トヨタ自動車株式会社
ドローン
13日前
個人
エアライナー全自動パラシュート
26日前
株式会社ACSL
システム
1か月前
合同会社アドエア
パラシュート射出装置
26日前
株式会社セネック
ドローンポート
10か月前
株式会社セネック
ドローンポート
10か月前
合同会社アドエア
飛行体の落下補助装置
3か月前
株式会社中北製作所
羽ばたき装置
10か月前
株式会社中北製作所
羽ばたき装置
11か月前
株式会社SUBARU
電動航空機
10か月前
株式会社ACSL
システム
1か月前
個人
垂直離着陸機用ガスタービンエンジン
2か月前
株式会社SUBARU
回転翼航空機
10か月前
全日本空輸株式会社
ドーリシステム
5か月前
株式会社SUBARU
移動体
3か月前
HDサービス合同会社
カメラ装着装置
5か月前
ミネベアミツミ株式会社
無人機
12日前
ミネベアミツミ株式会社
無人機
12日前
本田技研工業株式会社
移動体
6か月前
株式会社日立製作所
推進装置
4か月前
本田技研工業株式会社
航空機
6か月前
本田技研工業株式会社
航空機
6か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ