TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019903
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123794
出願日
2023-07-28
発明の名称
衛星制御装置、衛星制御方法、およびプログラム
出願人
日本電気株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B64G
1/10 20060101AFI20250131BHJP(航空機;飛行;宇宙工学)
要約
【課題】所望の衛星装置との通信不可能な時間を短くすることができる衛星制御装置を提供する。
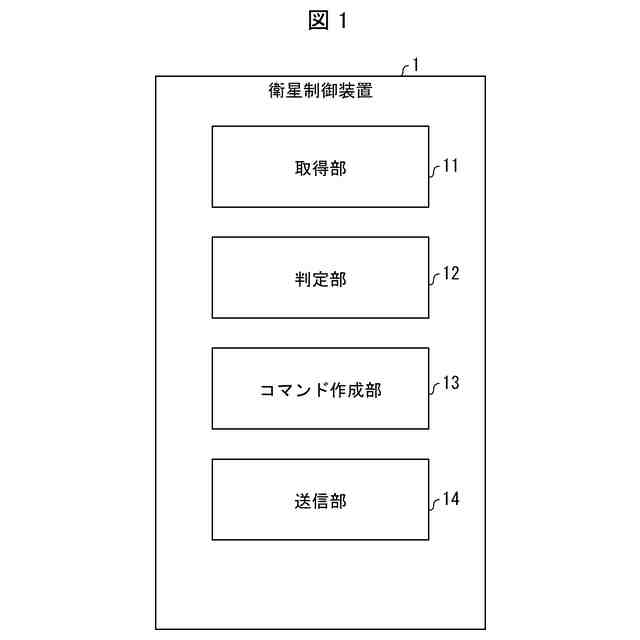
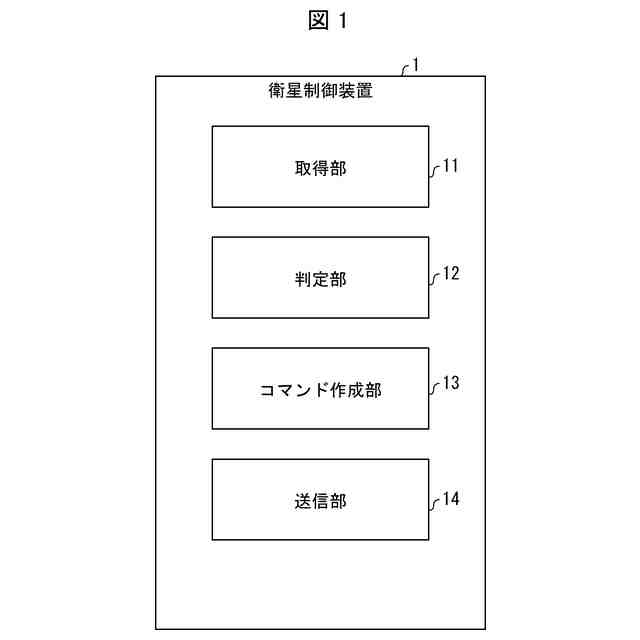
【解決手段】衛星制御装置(1)は、軌道に関する情報を取得する取得部(11)と、第2の衛星装置のそれぞれについて、第1の衛星装置から光通信捕捉追尾が可能かどうかを判定する判定部(12)と、第2の衛星装置を光通信捕捉追尾するためのコマンドを作成するコマンド作成部(13)と、コマンドを第1の衛星装置に対して送信する送信部(14)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
光通信機器を備える複数の衛星装置のそれぞれの軌道に関する情報を取得する取得手段と、
前記複数の衛星装置のそれぞれを第1の衛星装置に設定し、
前記複数の衛星装置に含まれる衛星装置であって、前記第1の衛星装置以外の複数の第2の衛星装置のそれぞれについて、前記情報に基づいて、前記第1の衛星装置から光通信捕捉追尾が可能かどうかを判定する判定手段と、
前記判定手段による判定結果に基づき、前記第1の衛星装置から光通信捕捉追尾が可能な第2の衛星装置を光通信捕捉追尾するためのコマンドを作成するコマンド作成手段と、
前記コマンドを、前記第1の衛星装置に対して送信する送信手段と、
を備える衛星制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記送信手段は、前記コマンドに、前記第1の衛星装置への経路を示す情報を含める、
請求項1に記載の衛星制御装置。
【請求項3】
前記コマンド作成手段は、作成した前記第1の衛星装置に対するコマンドと、過去の前記第1の衛星装置に対するコマンドとの間に差分がある場合、当該差分に基づくコマンドを作成する、
請求項1または2に記載の衛星制御装置。
【請求項4】
前記判定手段は、前記情報に基づいて、
前記第1の衛星装置の位置ベクトルおよび前記第2の衛星装置の位置ベクトルの差分である相対位置ベクトルと、
前記第1の衛星装置の速度ベクトルおよび前記第2の衛星装置の速度ベクトルの差分である相対速度ベクトルと、を算出し、
前記相対位置ベクトルおよび前記相対速度ベクトルに基づき、前記第2の衛星装置が前記第1の衛星装置から光通信捕捉追尾が可能かどうかを判定する、
請求項1または2に記載の衛星制御装置。
【請求項5】
前記判定手段は、前記相対位置ベクトルおよび前記相対速度ベクトルが、光通信捕捉追尾をするための制約条件をそれぞれ満たす場合、前記第2の衛星装置が前記第1の衛星装置から光通信捕捉追尾が可能であると判定する、
請求項4に記載の衛星制御装置。
【請求項6】
衛星制御装置が、
光通信機器を備える複数の衛星装置のそれぞれの軌道に関する情報を取得することと、
前記複数の衛星装置のそれぞれを第1の衛星装置に設定し、
前記複数の衛星装置に含まれる衛星装置であって、前記第1の衛星装置以外の複数の第2の衛星装置のそれぞれについて、前記情報に基づいて、前記第1の衛星装置から光通信捕捉追尾が可能かどうかを判定することと、
前記判定することにおける判定結果に基づき、前記第1の衛星装置から光通信捕捉追尾が可能な第2の衛星装置を光通信捕捉追尾するためのコマンドを作成することと、
前記コマンドを、前記第1の衛星装置に対して送信することと、
を含む衛星制御方法。
【請求項7】
コンピュータに、
光通信機器を備える複数の衛星装置のそれぞれの軌道に関する情報を取得する取得処理と、
前記複数の衛星装置のそれぞれを第1の衛星装置に設定し、
前記複数の衛星装置に含まれる衛星装置であって、前記第1の衛星装置以外の複数の第2の衛星装置のそれぞれについて、前記情報に基づいて、前記第1の衛星装置から光通信捕捉追尾が可能かどうかを判定する判定処理と、
前記判定処理における判定結果に基づき、前記第1の衛星装置から光通信捕捉追尾が可能な第2の衛星装置を光通信捕捉追尾するためのコマンドを作成するコマンド作成処理と、
前記コマンドを、前記第1の衛星装置に対して送信する送信処理と、
を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、衛星制御装置、衛星制御方法、およびプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
複数の衛星装置を含む衛星コンステレーションを用いて、衛星通信を広域に提供する事業が知られている。このような事業では、衛星コンステレーションを構成する各衛星装置を監視および制御するために、コマンドおよびテレメトリといったデータを、地上の衛星管制装置が地上局アンテナを介して各衛星装置と送受信する必要がある。
【0003】
しかしながら、衛星コンステレーションに含まれる衛星装置の数が増えると、各衛星装置とデータを送受信するために多くの地上局アンテナが必要となる。しかしながら、地上局アンテナの設置には多くの時間とコストが必要となる。そのため、衛星装置が、地上局アンテナと他の衛星装置との間のデータの送受信を中継する技術が知られている。
【0004】
例えば、特許文献1には、衛星と地球局との間の通信を中継する中継衛星を、衛星が志向追尾するように制御する衛星運用装置が開示されている。
【先行技術文献】
【特許文献】
【0005】
特許第7211651号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の衛星運用装置では、地球局は、中継衛星が通信可能な衛星装置としか、データの送受信をすることができない。そのため、所望の衛星装置と通信したい場合、地球局がデータを送受信可能な領域に、所望の衛星装置と通信可能な中継衛星が存在する必要がある。換言すると、特許文献1に記載の衛星運用装置では、所望の衛星装置と通信不可能な時間が長くなるという問題がある。
【0007】
本開示は、上記の問題に鑑みてなされたものであり、その一例示的目的は、所望の衛星装置との通信不可能な時間を短くする技術を提供することにある。
【課題を解決するための手段】
【0008】
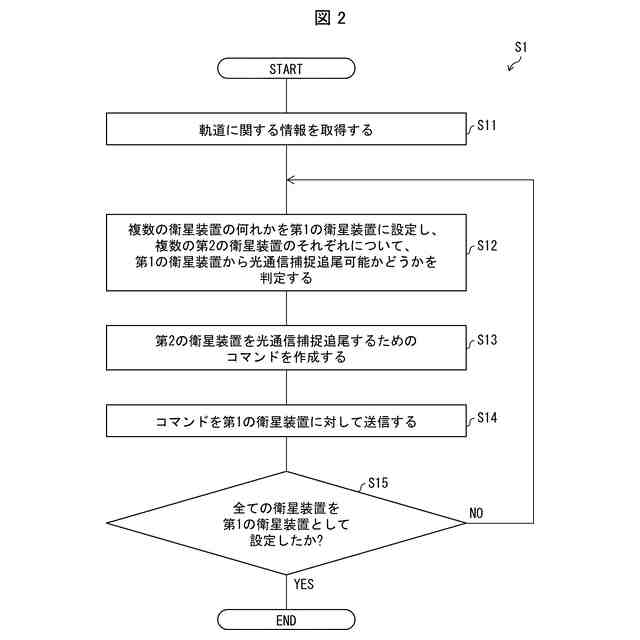
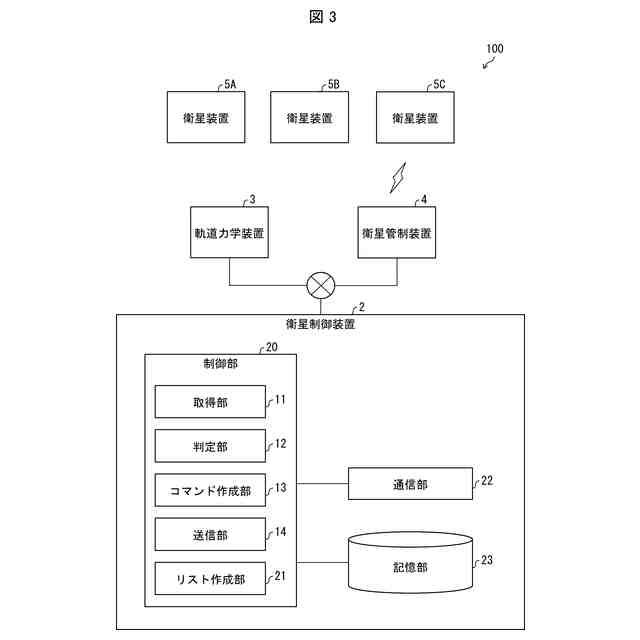
本開示の一例示的側面に係る衛星制御装置は、光通信機器を備える複数の衛星装置のそれぞれの軌道に関する情報を取得する取得手段と、前記複数の衛星装置のそれぞれを第1の衛星装置に設定し、前記複数の衛星装置に含まれる衛星装置であって、前記第1の衛星装置以外の複数の第2の衛星装置のそれぞれについて、前記情報に基づいて、前記第1の衛星装置から光通信捕捉追尾が可能かどうかを判定する判定手段と、前記判定手段による判定結果に基づき、前記第1の衛星装置から光通信捕捉追尾が可能な第2の衛星装置を光通信捕捉追尾するためのコマンドを作成するコマンド作成手段と、前記コマンドを、前記第1の衛星装置に対して送信する送信手段と、を備える。
【0009】
本開示の一例示的側面に係る衛星制御方法は、衛星制御装置が、光通信機器を備える複数の衛星装置のそれぞれの軌道に関する情報を取得することと、前記複数の衛星装置のそれぞれを第1の衛星装置に設定し、前記複数の衛星装置に含まれる衛星装置であって、前記第1の衛星装置以外の複数の第2の衛星装置のそれぞれについて、前記情報に基づいて、前記第1の衛星装置から光通信捕捉追尾が可能かどうかを判定することと、前記判定することにおける判定結果に基づき、前記第1の衛星装置から光通信捕捉追尾が可能な第2の衛星装置を光通信捕捉追尾するためのコマンドを作成することと、前記コマンドを、前記第1の衛星装置に対して送信することと、を含む。
【0010】
本開示の一例示的側面に係るプログラムは、コンピュータに、光通信機器を備える複数の衛星装置のそれぞれの軌道に関する情報を取得する取得処理と、前記複数の衛星装置のそれぞれを第1の衛星装置に設定し、前記複数の衛星装置に含まれる衛星装置であって、前記第1の衛星装置以外の複数の第2の衛星装置のそれぞれについて、前記情報に基づいて、前記第1の衛星装置から光通信捕捉追尾が可能かどうかを判定する判定処理と、前記判定処理における判定結果に基づき、前記第1の衛星装置から光通信捕捉追尾が可能な第2の衛星装置を光通信捕捉追尾するためのコマンドを作成するコマンド作成処理と、前記コマンドを、前記第1の衛星装置に対して送信する送信処理と、を実行させる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
10か月前
個人
ドローンシステム
21日前
個人
空港用貨物搬送車
8か月前
株式会社三圓
浮上装置
4か月前
個人
垂直離着陸機用エンジン改
8日前
個人
ドローンの計測操作方法2
5か月前
個人
ドローンの計測操作方法3
5か月前
個人
飛行艇
7か月前
個人
マルチコプター型電気飛行機
10か月前
個人
自由落下運航システム
10か月前
個人
人工衛星推進材循環エンジン
9か月前
キヤノン電子株式会社
磁気トルカ
5か月前
個人
空中移動システム
1か月前
個人
ドローンを自動離着陸する方法
25日前
個人
ドローン消音装置
3か月前
合同会社アドエア
飛行体の落下補助装置
1か月前
株式会社セネック
ドローンポート
8か月前
株式会社中北製作所
羽ばたき装置
8か月前
株式会社セネック
ドローンポート
8か月前
株式会社SUBARU
電動航空機
9か月前
株式会社中北製作所
羽ばたき装置
9か月前
国立大学法人九州大学
飛行体
11か月前
全日本空輸株式会社
ドーリシステム
3か月前
個人
垂直離着陸機用ガスタービンエンジン
21日前
株式会社SUBARU
回転翼航空機
9か月前
株式会社SUBARU
移動体
1か月前
SkyDeer株式会社
衛星制御方法
11か月前
HDサービス合同会社
カメラ装着装置
3か月前
本田技研工業株式会社
航空機
4か月前
本田技研工業株式会社
移動体
6か月前
株式会社SUBARU
構造体の製造方法
5か月前
株式会社日立製作所
推進装置
2か月前
本田技研工業株式会社
移動体
4か月前
本田技研工業株式会社
航空機
4か月前
本田技研工業株式会社
移動体
5か月前
株式会社SUBARU
構造体の製造方法
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ