TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019878
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123758
出願日
2023-07-28
発明の名称
情報処理装置およびその制御方法
出願人
キヤノン株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
G06T
7/70 20170101AFI20250131BHJP(計算;計数)
要約
【課題】複数の画像間の差異部分をより適切に把握する情報処理装置、その制御方法及びプログラムを提供する。
【解決手段】不揮発性メモリに状態変化判定処理を実行させるプログラムが格納された情報処理装置は、第1の時点で撮影された第1の撮影画像に基づいて生成された、対象物体における変状を示す第1の変状データ群と、第1の時点と異なる第2の時点で撮影された第2の撮影画像に基づき生成された、対象物体における変状を示す第2の変状データ群を取得し、第1の変状データ群内の位置と第2の変状データ群内の位置との位置合わせのために、第2の変状データ群の位置座標を補正し、補正された第2の変状データ群の位置座標を異なる方法で補正し、第1の変状データ群と補正された第2の変状データ群との比較に基づいて、2つの変状データ間で共通する変状部分である共通部分と、該2つの変状データ間で差異がある変状部分である差異部分と、を判定する。
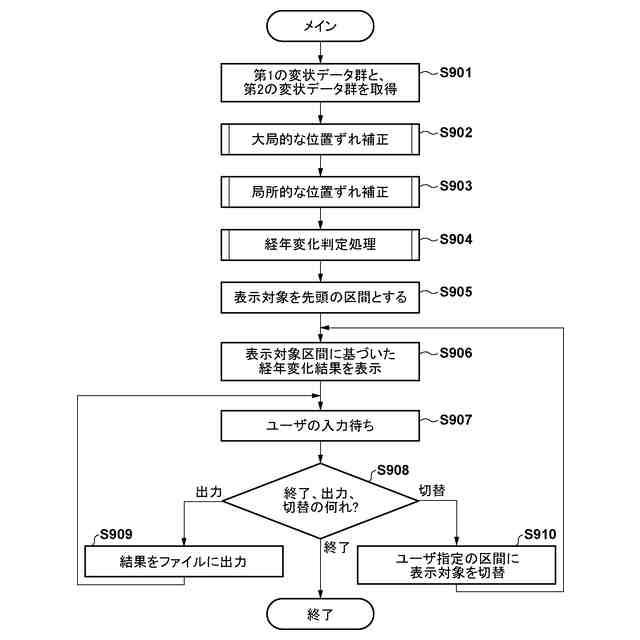
【選択図】図9
特許請求の範囲
【請求項1】
第1の時点で対象物体を撮影して得られた第1の撮影画像に基づいて生成された、前記対象物体における変状を示す第1の変状データを取得する第1の取得手段と、
前記第1の時点とは異なる第2の時点で前記対象物体を撮影して得られる第2の撮影画像に基づいて生成された、前記対象物体における変状を示す第2の変状データを取得する第2の取得手段と、
前記第1の変状データ内の位置と前記第2の変状データ内の位置との位置合わせのために、前記第2の変状データにおける位置座標を第1の補正手法により補正する第1の補正手段と、
前記第1の補正手段により補正された前記第2の変状データの位置座標を前記第1の補正手法とは異なる第2の補正手法によりさらに補正する第2の補正手段と、
前記第1の変状データと前記第2の補正手段により補正された前記第2の変状データとの比較に基づいて、2つの変状データ間で共通する変状部分である共通部分と、該2つの変状データ間で差異がある変状部分である差異部分と、を判定する変化判定手段と、
を有することを特徴とする情報処理装置。
続きを表示(約 1,800 文字)
【請求項2】
前記第1の補正手法は、前記対象物体の第1の範囲を対象とした1次元位置ずれ検出に基づく1次元補正であり、
前記第2の補正手法は、前記第1の範囲より狭い第2の範囲を対象とした2次元位置ずれ検出に基づく2次元補正である
ことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記第1の補正手法では、前記第1の撮影画像に基づいて第1のテンプレート画像を作成し、前記第2の撮影画像に対して前記第1のテンプレート画像によるテンプレートマッチングを行うことにより、前記1次元位置ずれ検出を行い、
前記第2の補正手法では、前記第1の撮影画像に基づいて前記第1のテンプレート画像よりも小さいサイズの第2のテンプレート画像を作成し、前記第2の撮影画像に対して前記第2のテンプレート画像によるテンプレートマッチングを行うことにより、前記2次元位置ずれ検出を行う
ことを特徴とする請求項2に記載の情報処理装置。
【請求項4】
前記第1の撮影画像は、第1の方向に移動しながら前記対象物体を撮影して得られた複数の撮影画像の1つであり、
前記第1の補正手段は、前記第1の方向と直交する第2の方向に関して前記1次元位置ずれ検出を行う
ことを特徴とする請求項2に記載の情報処理装置。
【請求項5】
前記変化判定手段により判定された前記共通部分と前記差異部分とを表現する変状変化データを記憶する記憶手段をさらに有する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項6】
前記変化判定手段により判定された前記共通部分と前記差異部分とを位置合わせして表示部に表示する表示制御手段をさらに有し、
前記表示制御手段は、前記共通部分と前記差異部分とを識別可能に表示する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項7】
前記表示制御手段は、さらに、前記差異部分に関して、前記第1の変状データに存在しかつ前記第2の変状データに存在しない第1の差異部分と、前記第1の変状データに存在せずかつ前記第2の変状データに存在する第2の差異部分と、を識別可能に表示する
ことを特徴とする請求項6に記載の情報処理装置。
【請求項8】
前記表示制御手段は、前記第1の変状データの位置座標を基準として、前記第1の撮影画像に対して前記共通部分と前記差異部分とを重畳表示する
ことを特徴とする請求項6に記載の情報処理装置。
【請求項9】
前記表示制御手段は、前記第1の変状データの位置座標を基準として、前記第1の撮影画像に対して前記共通部分と前記差異部分とを重畳表示する第1の表示と、前記第2の変状データの位置座標を基準として、前記第2の撮影画像に対して前記共通部分と前記差異部分とを重畳表示する第2の表示と、を切り替え可能に構成される
ことを特徴とする請求項6に記載の情報処理装置。
【請求項10】
情報処理装置の制御方法であって、
第1の時点で対象物体を撮影して得られた第1の撮影画像に基づいて生成された、前記対象物体における変状を示す第1の変状データを取得する第1の取得工程と、
前記第1の時点とは異なる第2の時点で前記対象物体を撮影して得られる第2の撮影画像に基づいて生成された、前記対象物体における変状を示す第2の変状データを取得する第2の取得工程と、
前記第1の変状データ内の位置と前記第2の変状データ内の位置との位置合わせのために、前記第2の変状データにおける位置座標を第1の補正手法により補正する第1の補正工程と、
前記第1の補正工程により補正された前記第2の変状データの位置座標を前記第1の補正手法とは異なる第2の補正手法によりさらに補正する第2の補正工程と、
前記第1の変状データと前記第2の補正工程により補正された前記第2の変状データとの比較に基づいて、2つの変状データ間で共通する変状部分である共通部分と、該2つの変状データ間で差異がある変状部分である差異部分と、を判定する変化判定工程と、
を含むことを特徴とする制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の画像データの差分を導出する技術に関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
近年、構造物を撮影した画像から、当該構造物の健全度を判定する画像ベースの点検が広く実施されている。例えば、画像に対して手作業によるトレースや画像認識技術によって変状(損傷)部分を抽出し、それらの位置、規模、数量に基づき健全度を判定する。特許文献1では、同じ構造物を異なる時点で撮影した画像から、変状の経年変化を判定する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-211277号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、撮影状況の違いなどにより異なる時点で得られる画像間で位置ずれが発生する場合がある。特許文献1には、2つの画像それぞれで検出されたひび割れの関係を推定しているが、2つの画像の撮影領域が大きく異なる場合、位置ずれにより比較が困難となる。例えば、特徴点対応における探索範囲が大きく広がり、演算コストが増大したり、誤対応が増えて正しい位置合わせが困難になったりするという課題がある。
【0005】
本発明は、このような問題に鑑みてなされたものであり、複数の画像間の差異部分をより適切に把握可能とする技術を提供することを目的としている。
【課題を解決するための手段】
【0006】
上述の問題点を解決するため、本発明に係る情報処理装置は以下の構成を備える。すなわち、情報処理装置は、
第1の時点で対象物体を撮影して得られた第1の撮影画像に基づいて生成された、前記対象物体における変状を示す第1の変状データを取得する第1の取得手段と、
前記第1の時点とは異なる第2の時点で前記対象物体を撮影して得られる第2の撮影画像に基づいて生成された、前記対象物体における変状を示す第2の変状データを取得する第2の取得手段と、
前記第1の変状データ内の位置と前記第2の変状データ内の位置との位置合わせのために、前記第2の変状データにおける位置座標を第1の補正手法により補正する第1の補正手段と、
前記第1の補正手段により補正された前記第2の変状データの位置座標を前記第1の補正手法とは異なる第2の補正手法によりさらに補正する第2の補正手段と、
前記第1の変状データと前記第2の補正手段により補正された前記第2の変状データとの比較に基づいて、2つの変状データ間で共通する変状部分である共通部分と、該2つの変状データ間で差異がある変状部分である差異部分と、を判定する変化判定手段と、
を有する。
【発明の効果】
【0007】
本発明によれば、複数の画像間の差異部分をより適切に把握可能とする技術を提供することができる。
【図面の簡単な説明】
【0008】
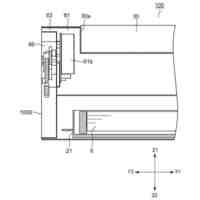
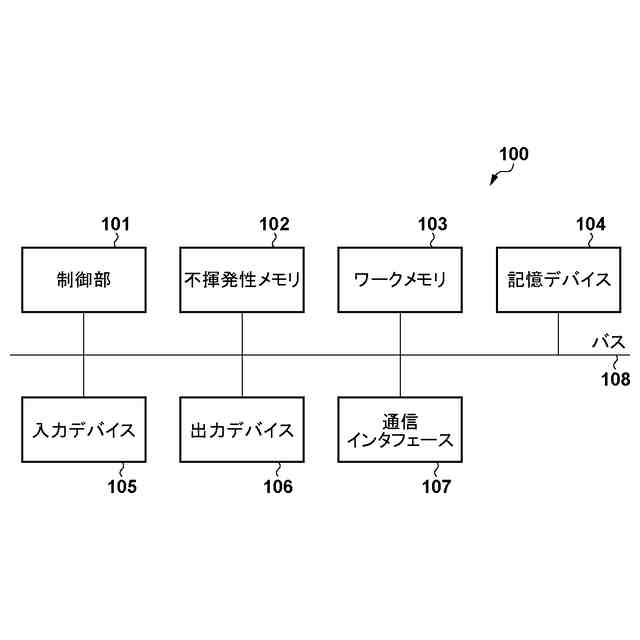
情報処理装置のハードウェア構成を示す図である。
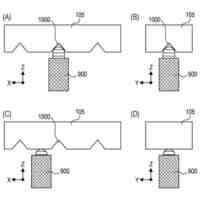
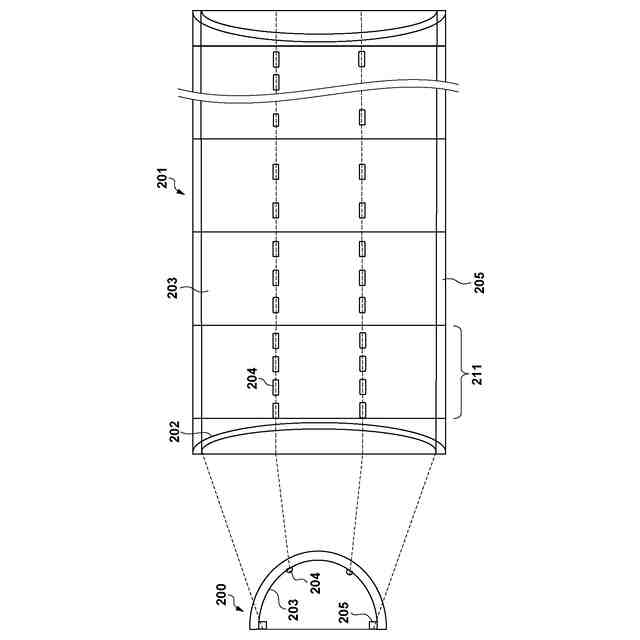
トンネルの断面図と点検用画像の関係を説明する図である。
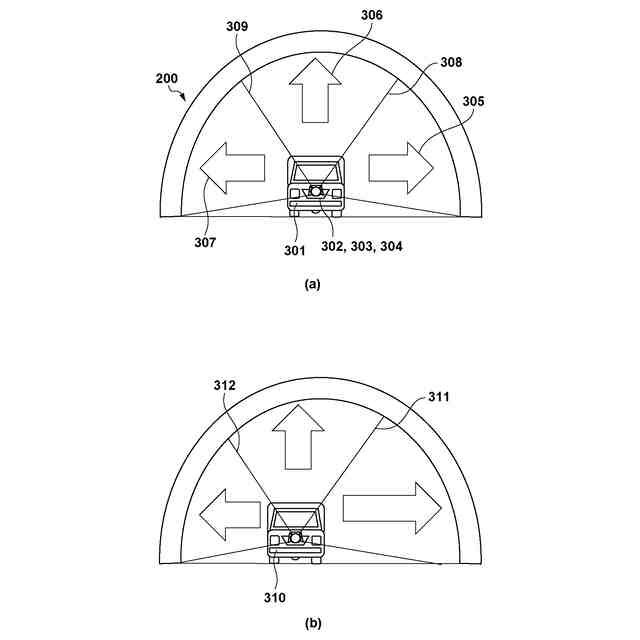
トンネル内壁を撮影する状況を説明する図である。
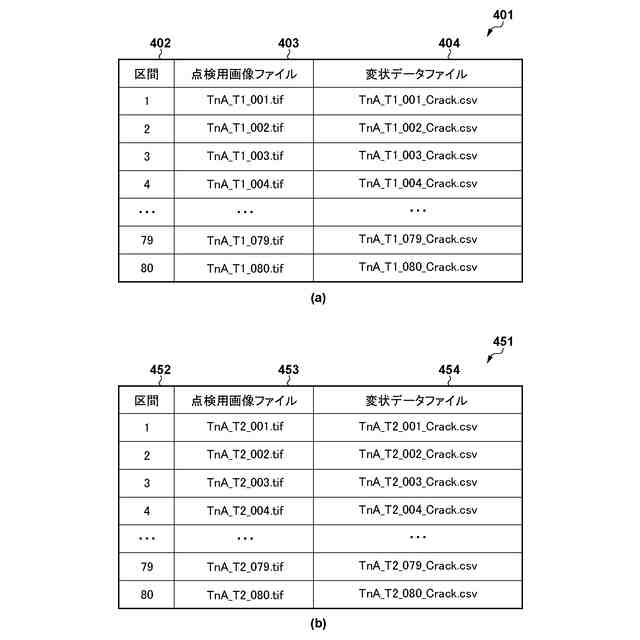
管理テーブルの例を示す図である。
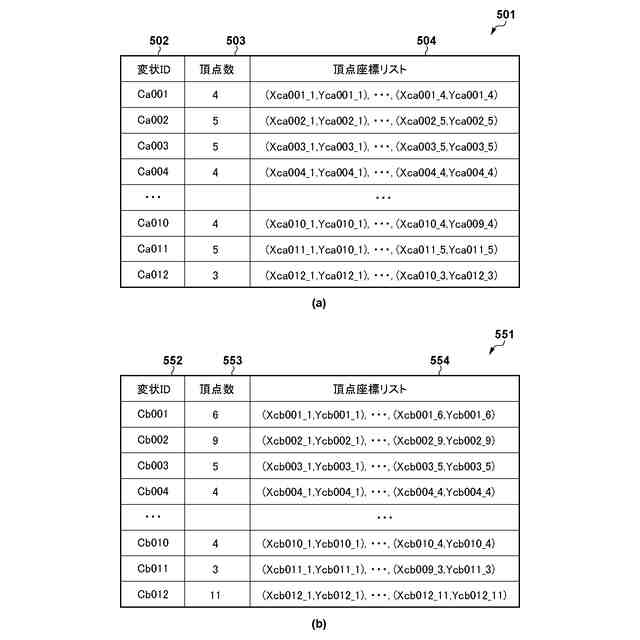
変状データテーブルの例を示す図である。
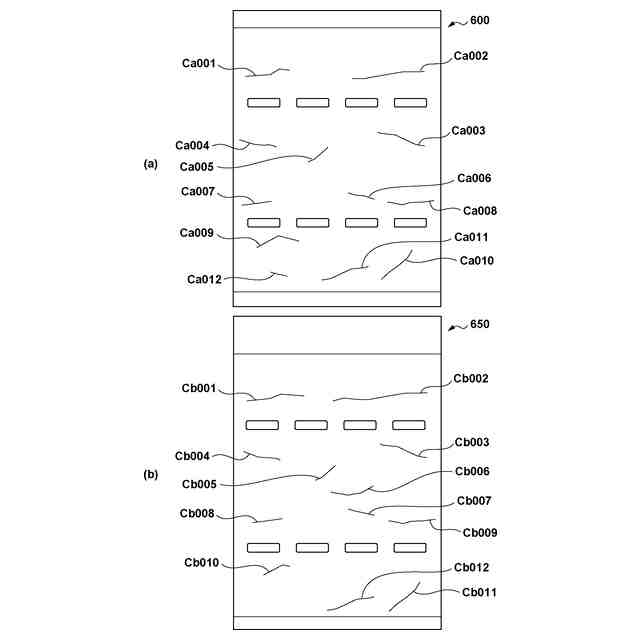
変状データを描画した例を示す図である。
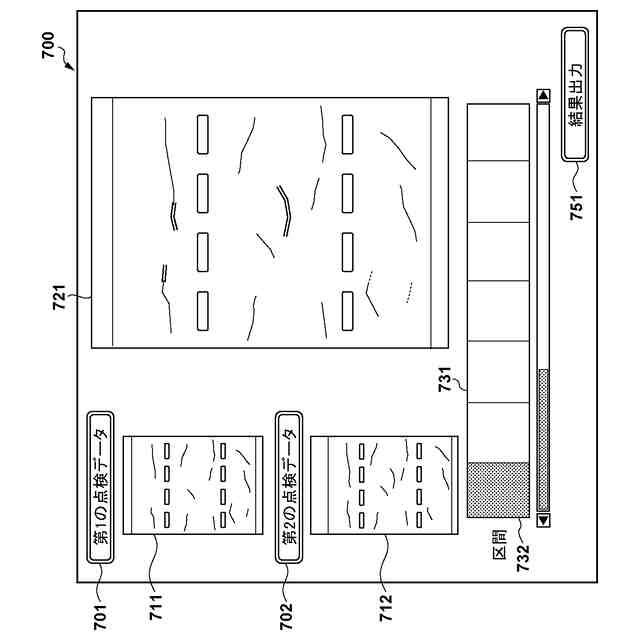
GUI画面の例を示す図である。
状態変化の表示形態の例を示す図である。
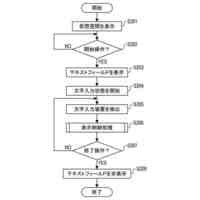
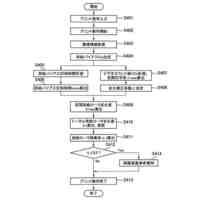
状態変化判定処理のフローチャートである。
大局的な位置ずれ補正処理(S902)の詳細フローチャートである。
大局的な位置ずれ量の算出方法を説明する図である。
補正後の点検用画像と変状データテーブルの例を示す図である。
局所的な位置ずれ補正処理(S903)の詳細フローチャートである。
局所的な位置ずれ量の算出方法を説明する図である。
局所的な位置ずれ補正後の変状データテーブルの例を示す図である。
経年変化判定処理(S904)の詳細フローチャートである。
経年変化データ算出処理(S1603)の詳細フローチャートである。
膨張処理を説明する図である。
共通部分と差異部分の関係の例を示す図である。
共通部分と差異部分の変状データテーブルの例を示す図である。
経年変化算出結果の表示画面の例を示す図である。
大局的な位置ずれ算出処理で用いるテンプレートの例を示す図である。
変形例におけるGUI画面の例を示す図である。
変形例における経年変化算出結果の表示画面の例を示す図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものではない。実施形態には複数の特徴が記載されているが、これらの複数の特徴の全てが発明に必須のものとは限らず、また、複数の特徴は任意に組み合わせられてもよい。さらに、添付図面においては、同一若しくは同様の構成に同一の参照番号を付し、重複した説明は省略する。
【0010】
(第1実施形態)
本発明に係る情報処理装置の第1実施形態として、トンネルの覆工面における変状の経年(経時)変化を検出する情報処理装置を例に挙げて以下に説明する。より具体的には、変状について、進展、縮退、修繕等による消失等の状態変化を判定し、変状の状態変化をより正確に再現可能な変状データを作成し、変状の状態変化を多面的に把握できるように表示する例について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
記録装置
今日
キヤノン株式会社
電子機器
今日
キヤノン株式会社
定着装置
14日前
キヤノン株式会社
記録装置
1日前
キヤノン株式会社
撮像装置
8日前
キヤノン株式会社
記録装置
14日前
キヤノン株式会社
記録装置
1日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
撮像装置
1日前
キヤノン株式会社
光学機器
7日前
キヤノン株式会社
電子機器
1日前
キヤノン株式会社
電子機器
2日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
記録装置
14日前
キヤノン株式会社
表示装置
1日前
キヤノン株式会社
表示装置
1日前
キヤノン株式会社
撮像装置
1日前
キヤノン株式会社
定着装置
1日前
キヤノン株式会社
制御装置
1日前
キヤノン株式会社
表示装置
1日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
液体吐出装置
1日前
キヤノン株式会社
画像形成装置
14日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
液体収容容器
8日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
14日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ