TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019187
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2024203341,2021042627
出願日
2024-11-21,2021-03-16
発明の名称
制御装置、制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/24 20240101AFI20250130BHJP(制御;調整)
要約
【課題】処理負荷を低減しつつ走行軌道のリスクを適切に評価すること。
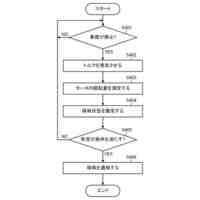
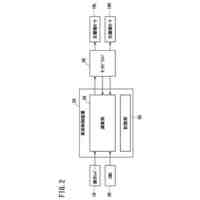
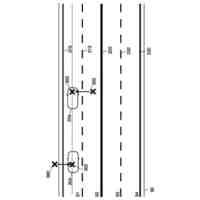
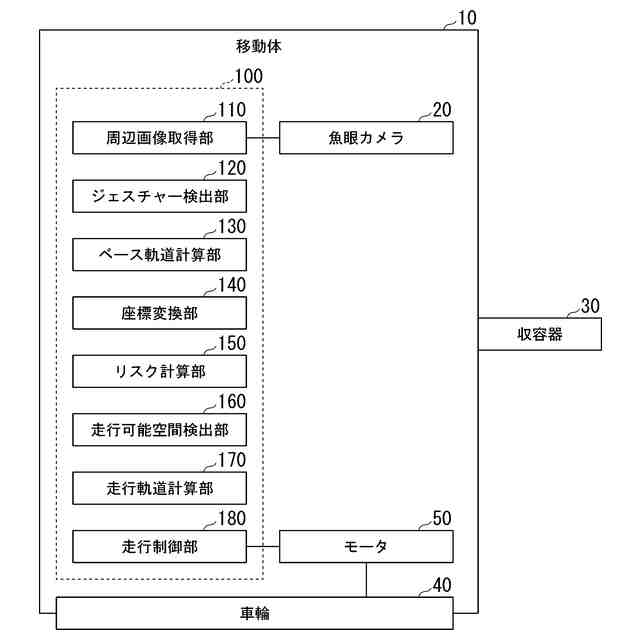
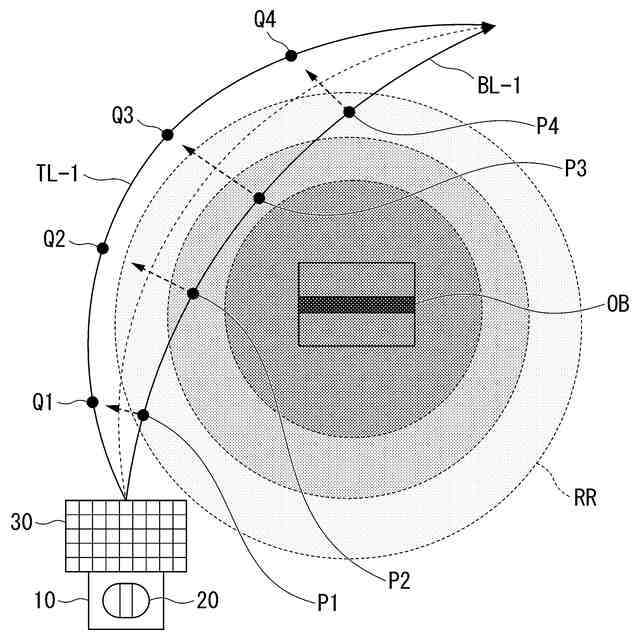
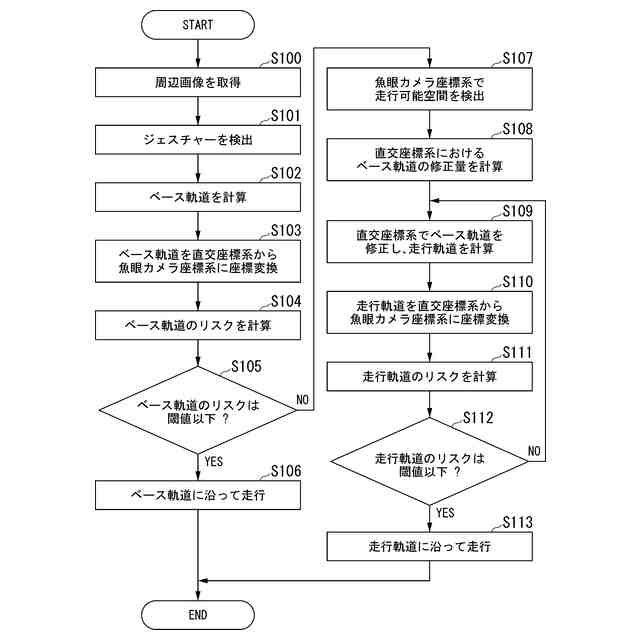
【解決手段】移動体に搭載された魚眼カメラが撮像された周辺画像を取得する周辺画像取得部と、移動体の将来の走行に関する指示を直交座標系におけるベース軌道として計算するベース軌道計算部と、取得した直交座標系におけるベース軌道を、魚眼カメラ座標系におけるベース軌道に座標変換する座標変換部と、周辺画像と、魚眼カメラ座標系におけるベース軌道とに基づいて、魚眼カメラ座標系におけるベース軌道のリスクを計算するリスク計算部と、魚眼カメラ座標系におけるベース軌道のリスクに基づいて、直交座標系におけるベース軌道を修正することで走行軌道を計算する走行軌道計算部と、を備え、走行軌道計算部は、直交座標系におけるベース軌道上の軌道点の修正量を、魚眼カメラ座標系におけるベース軌道の対応する軌道点におけるリスクの大きさに応じて異ならせる、制御装置。
【選択図】図1
特許請求の範囲
【請求項1】
移動体に搭載された魚眼カメラによって撮像された画像である、前記移動体の周辺画像を取得する周辺画像取得部と、
前記移動体の将来の走行に関する指示を直交座標系におけるベース軌道として計算するベース軌道計算部と、
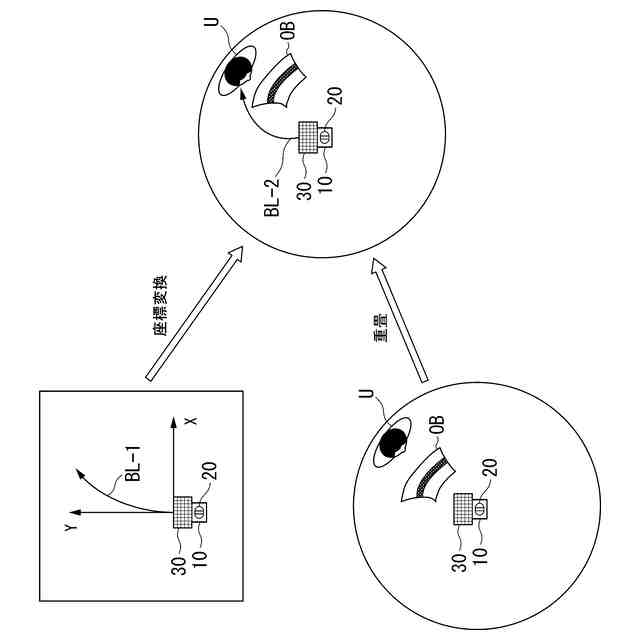
前記取得した直交座標系におけるベース軌道を、魚眼カメラ座標系におけるベース軌道に座標変換する座標変換部と、
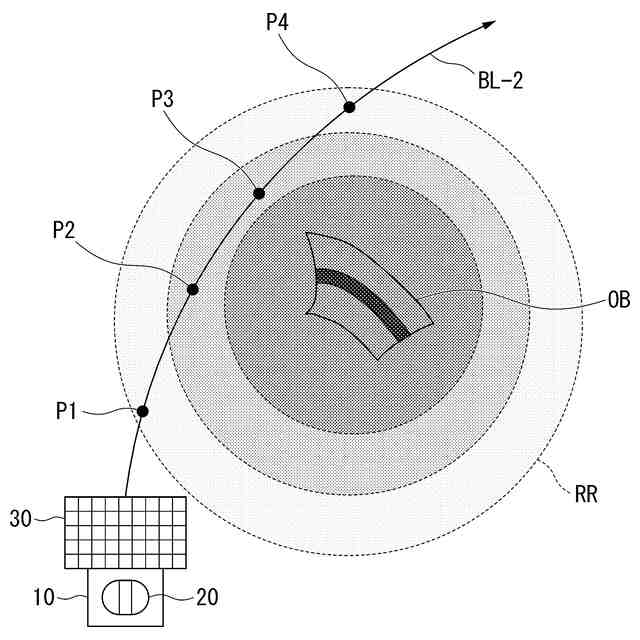
前記周辺画像と、前記魚眼カメラ座標系におけるベース軌道とに基づいて、前記魚眼カメラ座標系におけるベース軌道のリスクを計算するリスク計算部と、
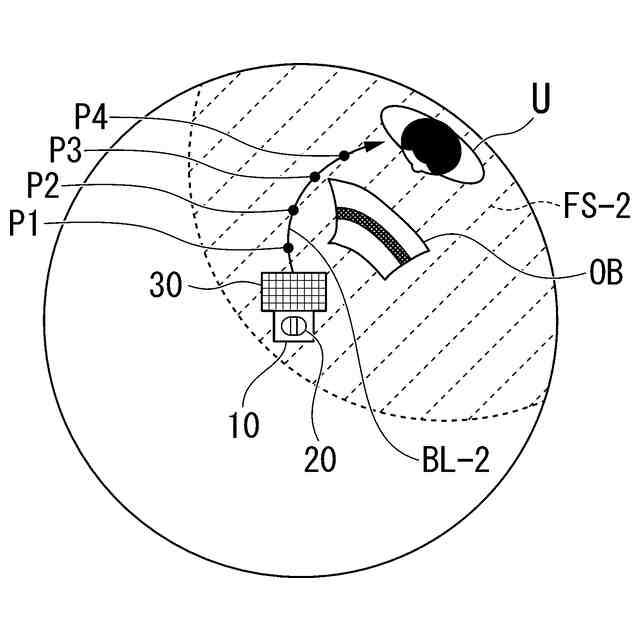
前記魚眼カメラ座標系におけるベース軌道のリスクに基づいて、前記直交座標系におけるベース軌道を修正することによって走行軌道を計算する走行軌道計算部と、
を備え、
前記走行軌道計算部は、前記直交座標系におけるベース軌道上の軌道点の修正量を、前記魚眼カメラ座標系におけるベース軌道の対応する軌道点におけるリスクの大きさに応じて異ならせる、
制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記座標変換部は、前記直交座標系における走行軌道を、前記魚眼カメラ座標系における走行軌道に座標変換し、
前記リスク計算部は、前記周辺画像と、前記魚眼カメラ座標系における走行軌道とに基づいて、前記魚眼カメラ座標系における走行軌道のリスクを計算し、
前記走行軌道計算部は、前記魚眼カメラ座標系における走行軌道のリスクに基づいて、前記直交座標系における走行軌道を修正することによって前記走行軌道を再計算する、
請求項1に記載の制御装置。
【請求項3】
前記ベース軌道又は走行軌道に沿って、前記移動体を走行させる走行制御部を更に備え、
前記走行制御部は、前記リスク計算部が、前記ベース軌道又は走行軌道のリスクが閾値以下であると判定した場合、前記ベース軌道又は走行軌道に沿って、前記移動体を走行させる、
請求項1又は2に記載の制御装置。
【請求項4】
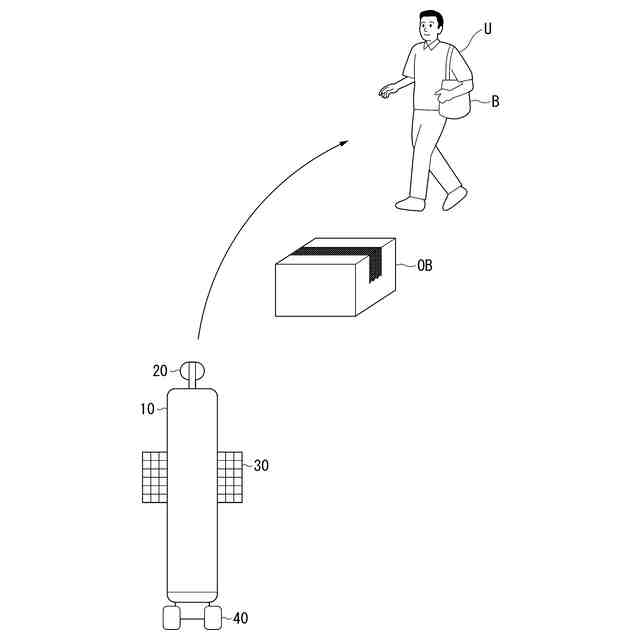
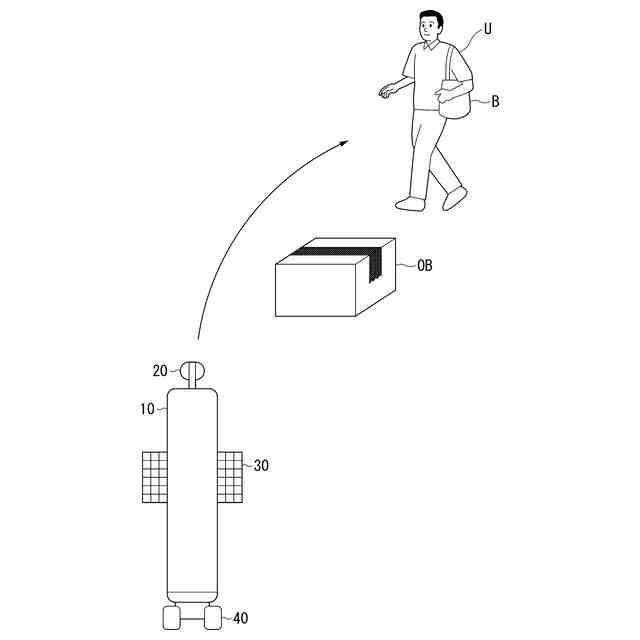
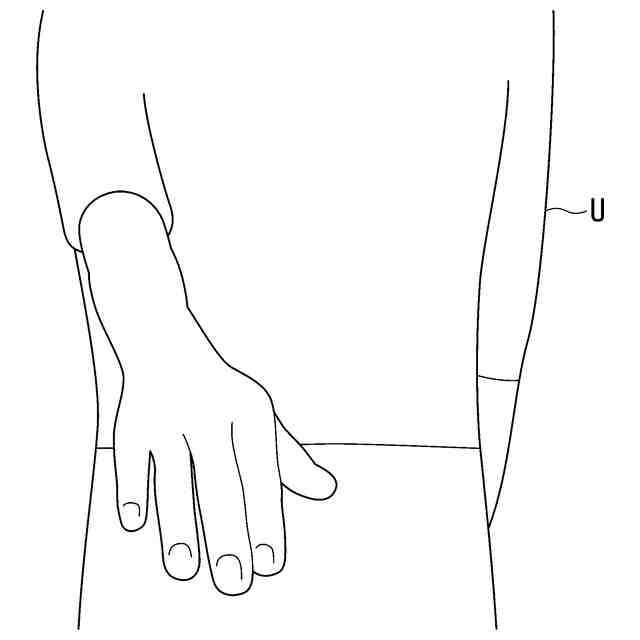
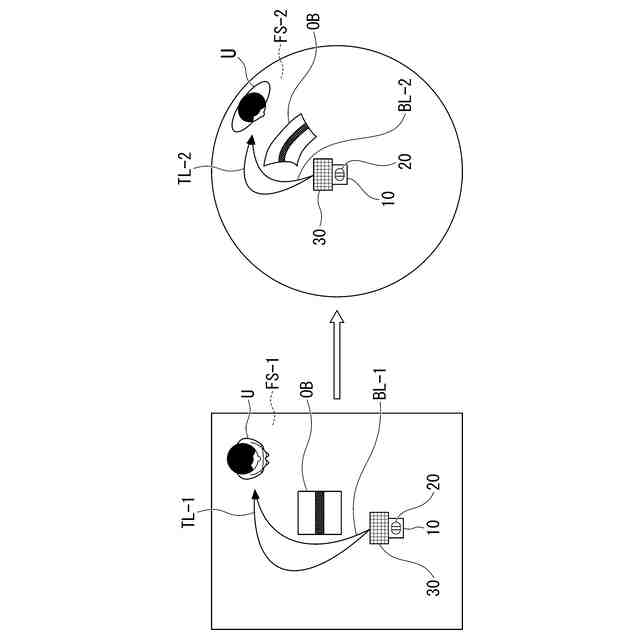
ユーザによる前記移動体の将来の走行に関する指示を示す身体動作を検出するジェスチャー検出部を更に備え、
前記ベース軌道計算部は、前記ジェスチャー検出部によって検出された身体動作に基づいて、前記直交座標系におけるベース軌道を計算する、
請求項1から3のいずれか1項に記載の制御装置。
【請求項5】
移動体に搭載されたコンピュータが、
移動体に搭載された魚眼カメラによって撮像された画像である、前記移動体の周辺画像を取得し、
前記移動体の将来の走行に関する指示を直交座標系におけるベース軌道として取得し、
前記取得した直交座標系におけるベース軌道を、魚眼カメラ座標系におけるベース軌道に座標変換し、
前記周辺画像と、前記魚眼カメラ座標系におけるベース軌道とに基づいて、前記魚眼カメラ座標系におけるベース軌道のリスクを計算し、
前記魚眼カメラ座標系におけるベース軌道のリスクに基づいて、前記直交座標系におけるベース軌道を修正することによって走行軌道を計算する、
制御方法。
【請求項6】
移動体に搭載されたコンピュータに、
移動体に搭載された魚眼カメラによって撮像された画像である、前記移動体の周辺画像を取得させ、
前記移動体の将来の走行に関する指示を直交座標系におけるベース軌道として取得させ、
前記取得した直交座標系におけるベース軌道を、魚眼カメラ座標系におけるベース軌道に座標変換させ、
前記周辺画像と、前記魚眼カメラ座標系におけるベース軌道とに基づいて、前記魚眼カメラ座標系におけるベース軌道のリスクを計算させ、
前記魚眼カメラ座標系におけるベース軌道のリスクに基づいて、前記直交座標系におけるベース軌道を修正することによって走行軌道を計算させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御方法、およびプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
自律移動可能なロボットに魚眼カメラを搭載する技術が知られている。例えば、特許文献1には、自律移動可能なロボットに魚眼カメラを搭載し、当該魚眼カメラによって撮像された画像に基づいて、ロボットの走行軌道を計算する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2004-303137号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術は、特定位置の場所を示すためのマーカを設置し、マーカとロボットとの間の相対距離や相対方向を用いて、ロボットを走行させるものである。しかしながら、ロボットの走行のためにマーカを設置することは手間がかかる。
【0005】
さらに、従来の技術は、魚眼カメラによって撮像された画像の全点を魚眼カメラ座標系から直交座標系に座標変換し、変換後の座標に基づいて走行軌道のリスクを評価し、走行軌道を修正するものであるため、魚眼カメラ座標系から直交座標系に座標変換する際の処理負荷が大きいものと想定される。
【0006】
本発明は、このような事情を考慮してなされたものであり、処理負荷を低減しつつ走行軌道のリスクを適切に評価することができる制御装置、制御方法、およびプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0007】
この発明に係る制御装置、制御方法、およびプログラムは、以下の構成を採用した。
(1):本発明の一態様に係る制御装置は、移動体に搭載された魚眼カメラによって撮像された画像である、前記移動体の周辺画像を取得する周辺画像取得部と、前記移動体の将来の走行に関する指示を直交座標系におけるベース軌道として計算するベース軌道計算部と、前記取得した直交座標系におけるベース軌道を、魚眼カメラ座標系におけるベース軌道に座標変換する座標変換部と、前記周辺画像と、前記魚眼カメラ座標系におけるベース軌道とに基づいて、前記魚眼カメラ座標系におけるベース軌道のリスクを計算するリスク計算部と、前記魚眼カメラ座標系におけるベース軌道のリスクに基づいて、前記直交座標系におけるベース軌道を修正することによって走行軌道を計算する走行軌道計算部と、を備え、前記走行軌道計算部は、前記直交座標系におけるベース軌道上の軌道点の修正量を、前記魚眼カメラ座標系におけるベース軌道の対応する軌道点におけるリスクの大きさに応じて異ならせるものである。
【0008】
(2):上記(1)の態様において、前記座標変換部は、前記直交座標系における走行軌道を、前記魚眼カメラ座標系における走行軌道に座標変換し、前記リスク計算部は、前記周辺画像と、前記魚眼カメラ座標系における走行軌道とに基づいて、前記魚眼カメラ座標系における走行軌道のリスクを計算し、前記走行軌道計算部は、前記魚眼カメラ座標系における走行軌道のリスクに基づいて、前記直交座標系における走行軌道を修正することによって前記走行軌道を再計算するものである。
【0009】
(3):上記(1)又は(2)の態様において、前記ベース軌道又は走行軌道に沿って、前記移動体を走行させる走行制御部を更に備え、前記走行制御部は、前記リスク計算部が、前記ベース軌道又は走行軌道のリスクが閾値以下であると判定した場合、前記ベース軌道又は走行軌道に沿って、前記移動体を走行させるものである。
【0010】
(4):上記(1)から(3)のいずれかの態様において、ユーザによる前記移動体の将来の走行に関する指示を示す身体動作を検出するジェスチャー検出部を更に備え、前記ベース軌道計算部は、前記ジェスチャー検出部によって検出された身体動作に基づいて、前記直交座標系におけるベース軌道を計算するものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
報知装置
今日
本田技研工業株式会社
空気吹出構造
今日
本田技研工業株式会社
空調システム
今日
本田技研工業株式会社
車両前部構造
7日前
本田技研工業株式会社
鞍乗り型車両
14日前
本田技研工業株式会社
運転支援装置
8日前
本田技研工業株式会社
鞍乗り型車両
14日前
本田技研工業株式会社
充放電ユニット
8日前
本田技研工業株式会社
車両制御システム
今日
本田技研工業株式会社
回転電機用ステータ
8日前
本田技研工業株式会社
ハウジング及び回転電機
7日前
本田技研工業株式会社
検知装置付き車両用灯具
7日前
本田技研工業株式会社
車両制御装置、及び制御方法
今日
本田技研工業株式会社
検査装置、検査方法及び車両
8日前
本田技研工業株式会社
車両制御装置、及び制御方法
7日前
本田技研工業株式会社
冷却器、ハウジング及び回転電機
7日前
本田技研工業株式会社
冷却器、ハウジング及び回転電機
7日前
本田技研工業株式会社
超音波伝搬部材及び超音波測定構造
9日前
株式会社タチエス
エアバッグ装置
8日前
本田技研工業株式会社
車両制御装置、車両、及び、車両制御方法
8日前
本田技研工業株式会社
サーバ、システム、方法、及びプログラム
1日前
本田技研工業株式会社
移動体仲介システム、及び移動体仲介方法
14日前
本田技研工業株式会社
車内環境制御装置および車内環境制御方法
今日
スタンレー電気株式会社
ブラケット取付構造
7日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
表示制御装置、表示制御方法、及びプログラム
8日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
中継制御装置、中継制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
警報制御装置、警報制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ