TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025018633
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122519
出願日
2023-07-27
発明の名称
車両制御装置、車両、及び、車両制御方法
出願人
本田技研工業株式会社
代理人
弁理士法人桐朋
主分類
B60W
30/02 20120101AFI20250130BHJP(車両一般)
要約
【課題】より良好に車両を制御し得る車両制御装置、車両、及び、車両制御方法を提供する。
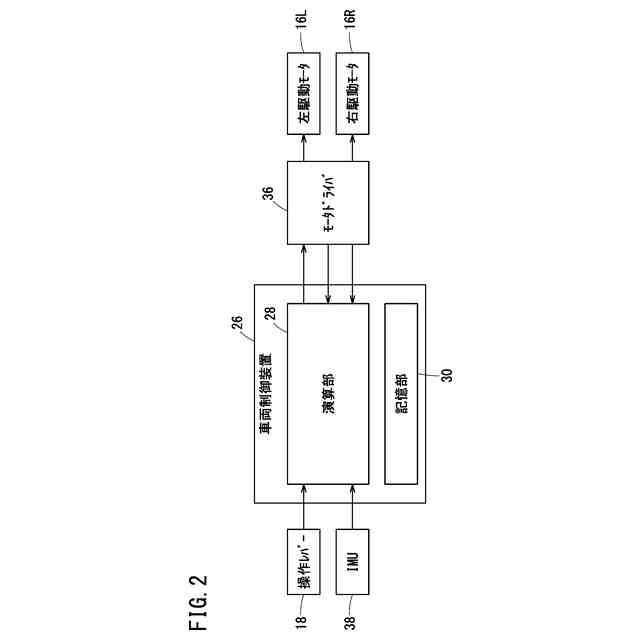
【解決手段】車両制御装置26は、目標車速と目標ヨーレートとを設定する目標値設定部と、車両がアンダステアリング状態であると判断された場合に、目標車速を補正する補正値を、偏差に基づいて算出する補正値算出部と、左駆動輪の目標車輪速と右駆動輪の目標車輪速とを、目標車速と目標ヨーレートと補正値とに基づいて設定する目標車輪速設定部と、左駆動モータの回転数を左駆動輪の目標車輪速に基づいて制御し、右駆動モータの回転数を右駆動輪の目標車輪速に基づいて制御する回転数制御部と、を備える。
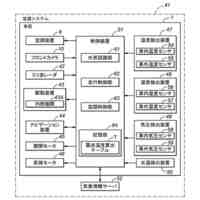
【選択図】図2
特許請求の範囲
【請求項1】
左駆動輪を駆動する左駆動モータと、右駆動輪を駆動する右駆動モータとを有し、前記左駆動輪の車輪速と前記右駆動輪の車輪速との差により旋回可能な車両を制御する車両制御装置であって、
目標車速と目標ヨーレートとを設定する目標値設定部と、
前記目標ヨーレートに応じたヨーレートと、前記車両の実ヨーレートとの偏差に基づいて、前記車両がアンダステアリング状態であるか否かを判定するアンダステアリング判定部と、
前記車両が前記アンダステアリング状態であると判断された場合に、前記目標車速を補正して低下させる補正値を、前記偏差に基づいて算出する補正値算出部と、
前記左駆動輪の目標車輪速と前記右駆動輪の目標車輪速とを、前記目標車速と前記目標ヨーレートと前記補正値とに基づいて設定する目標車輪速設定部と、
前記左駆動モータの回転数を前記左駆動輪の目標車輪速に基づいて制御し、前記右駆動モータの回転数を前記右駆動輪の目標車輪速に基づいて制御する回転数制御部と、
を備える、車両制御装置。
続きを表示(約 2,600 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記目標ヨーレートに応じたヨーレートとして、前記車両が乾燥アスファルト路面を走行中に前記車両が発生可能なヨーレートの推定値である規範ヨーレートを算出する規範ヨーレート算出部を更に備える、車両制御装置。
【請求項3】
請求項2に記載の車両制御装置において、
前記規範ヨーレート算出部は、前記目標ヨーレートの位相に対して前記規範ヨーレートの位相を遅くする、車両制御装置。
【請求項4】
請求項3に記載の車両制御装置において、
前記規範ヨーレート算出部は、前記目標ヨーレートと、前記目標ヨーレートの微分値とに基づいて、前記実ヨーレートの大きさが大きくなる最中であるか、前記実ヨーレートの大きさが小さくなる最中であるかを判定する操舵判定部を備え、
前記規範ヨーレート算出部は、前記実ヨーレートの大きさが大きくなる最中であると判定された場合の前記目標ヨーレートの位相に対する前記規範ヨーレートの位相の遅れを、前記実ヨーレートの大きさが小さくなる最中であると判定された場合の前記目標ヨーレートの位相に対する前記規範ヨーレートの位相の遅れよりも大きくする、車両制御装置。
【請求項5】
請求項1に記載の車両制御装置において、
前記補正値算出部は、前記偏差に基づいて、前記補正値の変化量を制限する変化量制限部を更に備える、車両制御装置。
【請求項6】
請求項1に記載の車両制御装置において、
前記左駆動輪の車輪速に基づいて前記左駆動輪のスリップを判定するための左スリップ判定上限値と左スリップ判定下限値とに基づいて前記左駆動輪の許容スリップ範囲を設定し、前記右駆動輪の車輪速に基づいて前記右駆動輪のスリップを判定するための右スリップ判定上限値と右スリップ判定下限値とに基づいて前記右駆動輪の許容スリップ範囲を設定する許容スリップ範囲設定部を更に有し、
前記目標車輪速設定部は、前記左駆動輪の目標車輪速を、前記目標車速と前記目標ヨーレートと前記補正値とに基づいて、前記左駆動輪の許容スリップ範囲に応じた範囲内において設定し、前記右駆動輪の目標車輪速を、前記目標車速と前記目標ヨーレートと前記補正値とに基づいて、前記右駆動輪の許容スリップ範囲に応じた範囲内において設定する、車両制御装置。
【請求項7】
請求項6に記載の車両制御装置において、
前記左駆動輪の目標車輪速を制限する目標車輪速制限範囲を前記左駆動輪の許容スリップ範囲に応じて設定し、前記右駆動輪の目標車輪速を制限する目標車輪速制限範囲を前記右駆動輪の許容スリップ範囲に応じて設定する目標車輪速制限範囲設定部を更に備え、
前記目標車輪速設定部は、前記左駆動輪の目標車輪速を、前記目標車速と前記目標ヨーレートと前記補正値とに基づいて、前記左駆動輪の目標車輪速制限範囲内において設定し、前記右駆動輪の目標車輪速を、前記目標車速と前記目標ヨーレートと前記補正値とに基づいて前記右駆動輪の目標車輪速制限範囲内において設定し、
前記左駆動輪の車輪速が前記左駆動輪の許容スリップ範囲内であり、且つ、前記右駆動輪の車輪速が前記右駆動輪の許容スリップ範囲内である場合、前記目標車輪速制限範囲設定部は、前記左駆動輪の目標車輪速制限範囲を前記左駆動輪の許容スリップ範囲よりも大きな範囲に設定し、前記右駆動輪の目標車輪速制限範囲を前記右駆動輪の許容スリップ範囲よりも大きな範囲に設定し、
前記左駆動輪の車輪速が前記左駆動輪の許容スリップ範囲外である、又は、前記右駆動輪の車輪速が前記右駆動輪の許容スリップ範囲外である場合、前記目標車輪速制限範囲設定部は、前記左駆動輪の目標車輪速制限範囲を前記左駆動輪の許容スリップ範囲と同じ範囲に設定し、前記右駆動輪の目標車輪速制限範囲を前記右駆動輪の許容スリップ範囲と同じ範囲に設定する、車両制御装置。
【請求項8】
請求項7に記載の車両制御装置において、
前記左駆動輪の車輪速が前記左駆動輪の許容スリップ範囲内であり、且つ、前記右駆動輪の車輪速が前記右駆動輪の許容スリップ範囲内である状態から、前記左駆動輪の車輪速が前記左駆動輪の許容スリップ範囲外である、又は、前記右駆動輪の車輪速が前記右駆動輪の許容スリップ範囲外である状態となった場合、前記目標車輪速制限範囲設定部は、前記左駆動輪の目標車輪速制限範囲を前記左駆動輪の許容スリップ範囲に徐々に近づけるとともに、前記右駆動輪の目標車輪速制限範囲を前記右駆動輪の許容スリップ範囲に徐々に近づける、車両制御装置。
【請求項9】
請求項7に記載の車両制御装置において、
前記左駆動輪の車輪速が前記左駆動輪の許容スリップ範囲外である、又は、前記右駆動輪の車輪速が前記右駆動輪の許容スリップ範囲外である状態から、前記左駆動輪の車輪速が前記左駆動輪の許容スリップ範囲内であり、且つ、前記右駆動輪の車輪速が前記右駆動輪の許容スリップ範囲内である状態となった場合、前記目標車輪速制限範囲設定部は、前記左駆動輪の目標車輪速制限範囲を徐々に大きくするとともに、前記右駆動輪の目標車輪速制限範囲を徐々に大きくする、車両制御装置。
【請求項10】
請求項6に記載の車両制御装置において、
車体速と、前記左駆動輪と接地路面との間の路面係数である左路面係数と、前記右駆動輪と接地路面との間の路面係数である右路面係数とを、前記左駆動輪の回転数と、前記左駆動輪の駆動トルクと、前記右駆動輪の回転数と、前記右駆動輪の駆動トルクと、前記車両の前後加速度と、前記実ヨーレートとに基づいて推定する推定部を更に備え、
前記許容スリップ範囲設定部は、前記左スリップ判定上限値と前記左スリップ判定下限値とを、推定した前記車体速である車体速推定値と、推定した前記左路面係数である左路面係数推定値とに基づいて設定し、前記右スリップ判定上限値と前記右スリップ判定下限値とを、前記車体速推定値と、推定した前記右路面係数である右路面係数推定値とに基づいて設定する、車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置、車両、及び、車両制御方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
下記特許文献1には、左右駆動輪の回転数差により旋回可能な電動作業車が開示されている。当該電動作業車は、左右の操縦レバーの操作量に基づいて求められた速度制御量に、旋回指令に基づく旋回角速度と実角速度とに基づいて求められた追加制御量を加算して加算制御量を求める。当該電動作業車は、旋回時には、加算制御量に基づいて左右駆動輪のモータを制御することで、旋回応答性を向上させている。
【先行技術文献】
【特許文献】
【0003】
特開2019-106786号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に開示された技術では、旋回応答性を向上させるために速度制御量に追加制御量を加算した加算制御量に基づいてモータを制御しているにすぎない。より良好に車両を制御し得る車両制御装置、車両、及び、車両制御方法が待望される。
【0005】
本発明は、上述した課題を解決することを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様は、左駆動輪を駆動する左駆動モータと、右駆動輪を駆動する右駆動モータとを有し、前記左駆動輪の車輪速と前記右駆動輪の車輪速との差により旋回可能な車両を制御する車両制御装置であって、当該車両制御装置は、目標車速と目標ヨーレートとを設定する目標値設定部と、前記目標ヨーレートに応じたヨーレートと、前記車両の実ヨーレートとの偏差に基づいて、前記車両がアンダステアリング状態であるか否かを判定するアンダステアリング判定部と、前記車両が前記アンダステアリング状態であると判断された場合に、前記目標車速を補正して低下させる補正値を、前記偏差に基づいて算出する補正値算出部と、前記左駆動輪の目標車輪速と前記右駆動輪の目標車輪速とを、前記目標車速と前記目標ヨーレートと前記補正値とに基づいて設定する目標車輪速設定部と、前記左駆動モータの回転数を前記左駆動輪の目標車輪速に基づいて制御し、前記右駆動モータの回転数を前記右駆動輪の目標車輪速に基づいて制御する回転数制御部と、を備える。
【0007】
本発明の第2の態様は、前記左駆動輪の車輪速と前記右駆動輪の車輪速との差により旋回可能な車両であり、当該車両は、上記第1の態様の車両制御装置を有する。
【0008】
本発明の第3の態様は、左駆動輪を駆動する左駆動モータと、右駆動輪を駆動する右駆動モータとを有し、前記左駆動輪の車輪速と前記右駆動輪の車輪速との差により旋回可能な車両を制御する車両制御方法であって、当該車両制御方法は、目標車速と目標ヨーレートとを設定する目標値設定ステップと、前記目標ヨーレートに応じたヨーレートと、前記車両の実ヨーレートとの偏差に基づいて、前記車両がアンダステアリング状態であるか否かを判定するアンダステアリング判定ステップと、前記車両が前記アンダステアリング状態であると判断された場合に、前記目標車速を補正して低下させる補正値を、前記偏差に基づいて算出する補正値算出ステップと、前記左駆動輪の目標車輪速と前記右駆動輪の目標車輪速とを、前記目標車速と前記目標ヨーレートと前記補正値とに基づいて設定する目標車輪速設定ステップと、前記左駆動モータの回転数を前記左駆動輪の目標車輪速に基づいて制御し、前記右駆動モータの回転数を前記右駆動輪の目標車輪速に基づいて制御する回転数制御ステップと、を備える。
【発明の効果】
【0009】
本発明により、良好に車両を制御し得る車両制御装置、車両、及び、車両制御方法を提供し得る。
【図面の簡単な説明】
【0010】
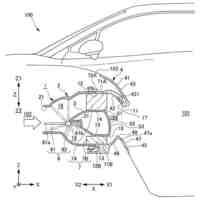
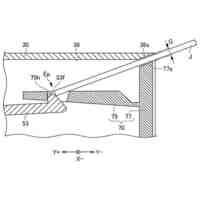
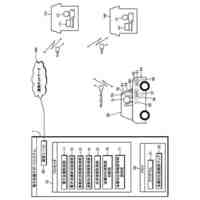
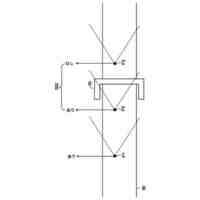
図1は、車両の斜視図である。
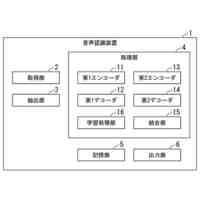
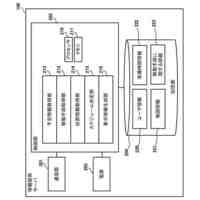
図2は、車両制御装置のブロック図である。
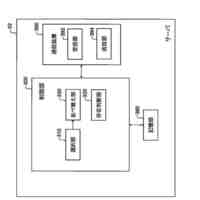
図3は、演算部のブロック図である。
図4は、規範ヨーレート算出部のブロック図である。
図5は、ヨーレート偏差算出部のブロック図である。
図6は、補正値算出部のブロック図である。
図7は、補正限度値と補正値の時間変化を示すグラフである。
図8は、許容スリップ範囲を示すグラフである。
図9は、目標動作点の設定方法について説明する図である。
図10は、目標動作点の設定方法のイメージ図である。
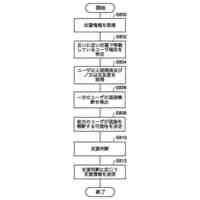
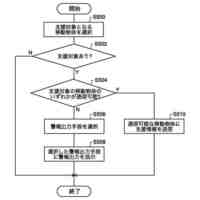
図11は、車両制御装置において行われる駆動モータ制御のフローチャートである。
図12は、本実施形態の許容範囲のイメージ図である。
図13は、演算部のブロック図である。
図14は、目標車輪速制限範囲について説明する図である。
図15は、目標車輪速制限範囲設定部のブロック図である。
図16は、すべり速度補正項初期値算出部のブロック図である。
図17は、目標車輪速制限値設定部のブロック図である。
図18は、すべり速度補正項の時間変化の例を示す図である。
図19は、ゲインのマップである。
図20は、ゲインのマップである。
図21は、車両制御装置において行われる駆動モータ制御のフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
報知装置
今日
本田技研工業株式会社
空気吹出構造
今日
本田技研工業株式会社
空調システム
今日
本田技研工業株式会社
車両前部構造
7日前
本田技研工業株式会社
充放電ユニット
8日前
本田技研工業株式会社
車両制御システム
今日
本田技研工業株式会社
検知装置付き車両用灯具
7日前
本田技研工業株式会社
ハウジング及び回転電機
7日前
本田技研工業株式会社
車両制御装置、及び制御方法
7日前
本田技研工業株式会社
車両制御装置、及び制御方法
今日
本田技研工業株式会社
冷却器、ハウジング及び回転電機
7日前
本田技研工業株式会社
冷却器、ハウジング及び回転電機
7日前
本田技研工業株式会社
車内環境制御装置および車内環境制御方法
今日
本田技研工業株式会社
サーバ、システム、方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
スタンレー電気株式会社
ブラケット取付構造
7日前
スタンレー電気株式会社
ブラケット取付構造
7日前
本田技研工業株式会社
中継制御装置、中継制御方法、及びプログラム
1日前
本田技研工業株式会社
警報制御装置、警報制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
支援制御装置、支援制御方法、及びプログラム
1日前
本田技研工業株式会社
検知装置付き車両用灯具およびカバー取外し方法
7日前
本田技研工業株式会社
音声認識装置、音声認識方法、およびプログラム
今日
本田技研工業株式会社
情報処理装置、移動体、情報処理方法、及びプログラム
1日前
本田技研工業株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
今日
本田技研工業株式会社
位置算出装置、支援制御装置、位置算出方法、及びプログラム
1日前
本田技研工業株式会社
電子会議サポートシステム、電子会議サポート方法、及びプログラム
1日前
本田技研工業株式会社
リスクエリア情報記憶装置、リスクエリア情報記憶方法及びプログラム
1日前
本田技研工業株式会社
リスクエリア情報送信装置、リスクエリア情報送信方法及びプログラム
1日前
本田技研工業株式会社
地物位置情報出力装置、支援制御装置、地物位置情報出力方法、及びプログラム
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ