TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025020829
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124434
出願日
2023-07-31
発明の名称
支援制御装置、支援制御方法、及びプログラム
出願人
本田技研工業株式会社
代理人
弁理士法人RYUKA国際特許事務所
主分類
G08G
1/09 20060101AFI20250205BHJP(信号)
要約
【課題】予防安全技術において、支援制御装置の処理負荷を軽減する。
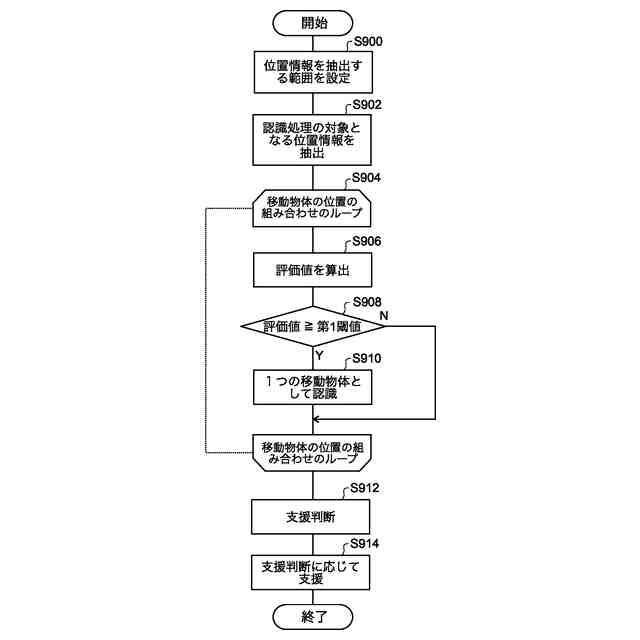
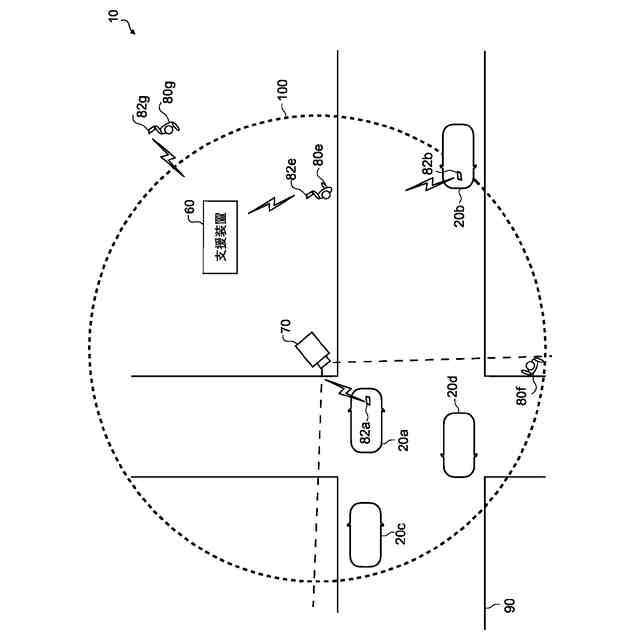
【解決手段】支援制御装置は、撮像装置により撮像された画像から検出された第1移動物体の位置情報を取得する第1取得部と、第2移動物体のそれぞれにおいて測定された第2移動物体の位置情報を取得する第2取得部と、第1移動物体の位置情報と第2移動物体の位置情報とを比較して、位置情報の一致度が予め定められた値より高い移動物体の組み合わせを1つの移動物体として認識する認識処理を行う認識処理部と、第1移動物体の位置情報及び第2移動物体の位置情報に認識処理を適用することよって得られた移動物体の位置情報に基づいて、移動物体に対する交通支援のための制御を行う支援制御部とを備え、認識処理部は、第1移動物体と第2移動物体の認識処理の対象とする位置情報を、撮像装置の位置を基準として設定される予め定められた範囲内の位置情報に限定する。
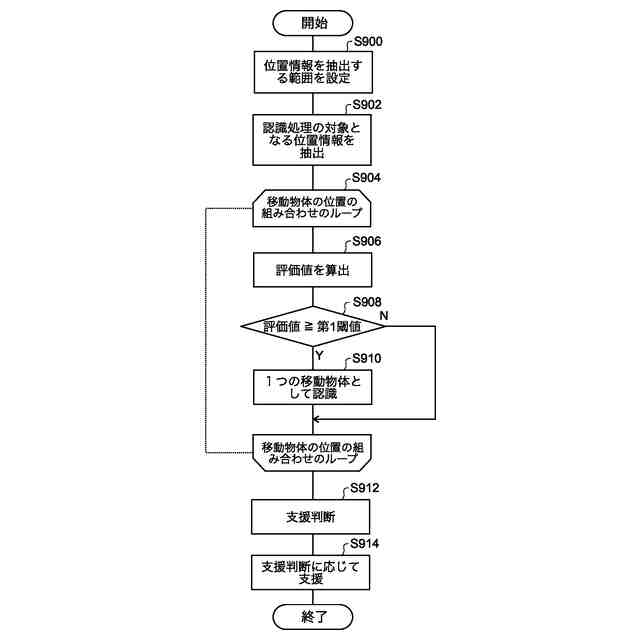
【選択図】図9
特許請求の範囲
【請求項1】
撮像装置により撮像された画像から検出された第1移動物体の位置情報を取得する第1取得部と、
第2移動物体のそれぞれにおいて測定された前記第2移動物体の位置情報を取得する第2取得部と、
前記第1移動物体の位置情報と前記第2移動物体の位置情報とを、前記第1移動物体及び前記第2移動物体の組み合わせ毎に比較して、位置情報の一致度が予め定められた値より高い移動物体の組み合わせを1つの移動物体として認識する認識処理を行う認識処理部と、
前記第1移動物体の位置情報及び前記第2移動物体の位置情報に前記認識処理を適用することよって得られた移動物体の位置情報に基づいて、移動物体に対する交通支援のための制御を行う支援制御部と
を備え、
前記認識処理部は、前記第1移動物体の位置情報と前記第2移動物体の位置情報のうち前記認識処理の対象とする位置情報を、前記撮像装置の位置を基準として設定される予め定められた範囲内の位置情報に限定する
支援制御装置。
続きを表示(約 1,700 文字)
【請求項2】
前記予め定められた範囲は、前記撮像装置の設置位置を含む予め定められた固定の範囲である
請求項1に記載の支援制御装置。
【請求項3】
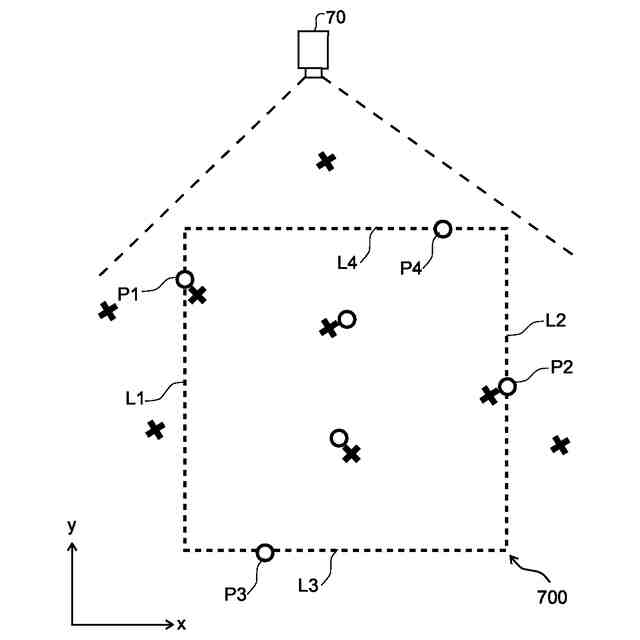
前記第1取得部によって取得された前記第1移動物体の位置情報のうち、前記予め定められた範囲内に定められた2軸の座標軸のそれぞれについて最外の座標成分を持つ少なくとも4つの位置情報を選択し、選択した位置情報のそれぞれを通る線で画定される範囲を、前記予め定められた範囲として設定する範囲設定部
をさらに備える請求項1に記載の支援制御装置。
【請求項4】
前記認識処理部は、前記第1移動物体の位置情報が示す位置と前記第2移動物体の位置情報が示す位置とを、前記第1移動物体及び前記第2移動物体の組み合わせ毎に比較して、位置の一致度が予め定められた値より高い移動物体の組み合わせを1つの移動物体として認識する
請求項1から3のいずれか一項に記載の支援制御装置。
【請求項5】
前記認識処理部は、前記位置の一致度が予め定められた時間にわたって予め定められた値より高い移動物体の組み合わせを1つの移動物体として認識する
請求項4に記載の支援制御装置。
【請求項6】
前記認識処理部はさらに、前記第1移動物体の位置情報の履歴から特定される移動方向と前記第2移動物体の位置情報の履歴から特定される移動方向とを、前記第1移動物体及び前記第2移動物体の組み合わせ毎に比較して、位置の一致度が予め定められた値より高く、かつ、移動方向の一致度が予め定められた値より高い移動物体の組み合わせを、1つの移動物体として認識する
請求項4に記載の支援制御装置。
【請求項7】
前記認識処理部は、位置の一致度が予め定められた時間にわたって予め定められた値より高く、かつ、移動方向の一致度が予め定められた時間にわたって予め定められた値より高い移動物体の組み合わせを、1つの移動物体として認識する
請求項6に記載の支援制御装置。
【請求項8】
前記認識処理部は、前記第1移動物体及び前記第2移動物体の組み合わせ毎に、
前記位置の一致度が予め定められた値より高いか否かを経時的に判定し、
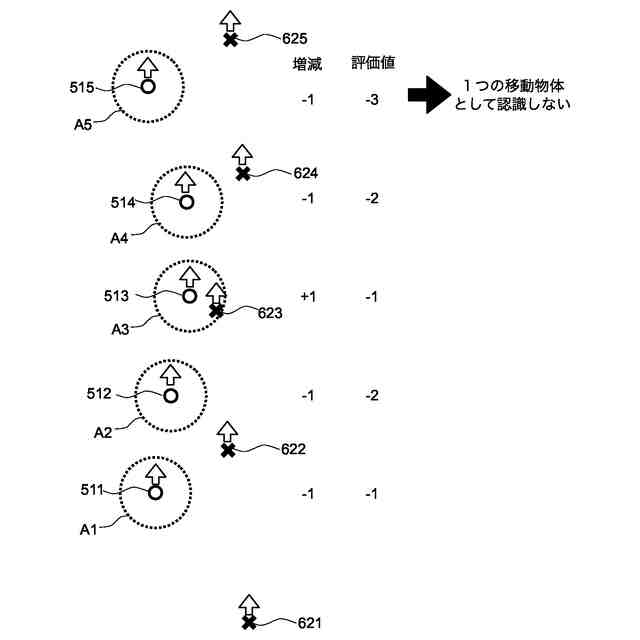
前記位置の一致度が予め定められた値より高いと判定される毎に、評価値を予め定められた値だけ上昇させ、前記位置の一致度が予め定められた値以下であると判定される毎に、前記評価値を予め定められた値だけ低下させる
処理を行い、
前記認識処理部は、前記評価値が予め定められた値に到達した移動物体の組み合わせを、1つの移動物体として認識する認識処理を行う
請求項4に記載の支援制御装置。
【請求項9】
前記認識処理部は、前記第1移動物体及び前記第2移動物体の組み合わせ毎に、
前記位置の一致度が予め定められた値より高く、かつ、前記移動方向の一致度が予め定められた値より高いか否かを経時的に判定し、
記位置の一致度が予め定められた値より高く、かつ、前記移動方向の一致度が予め定められた値より高いと判定される毎に、評価値を予め定められた値だけ上昇させ、前記位置の一致度が予め定められた値以下である又は前記移動方向の一致度が予め定められた値以下であると判定される毎に、前記評価値を予め定められた値だけ低下させる
処理を行い、
前記評価値が予め定められた値に到達した移動物体の組み合わせを、1つの移動物体として認識する認識処理を行う
請求項6に記載の支援制御装置。
【請求項10】
前記支援制御部は、前記第1移動物体の位置情報及び前記第2移動物体の位置情報に前記認識処理を適用することよって得られた移動物体の位置情報に基づいて、予め定められた時間内に互いに接近する移動物体が存在すると判断される場合に、互いに接近する可能性がある移動物体のうち少なくとも一方の移動物体に警報を送信するための制御を行う
請求項1から3のいずれか一項に記載の支援制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、支援制御装置、支援制御方法、及びプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて予防安全技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。特許文献1-6には、車両の運行支援に関する技術が記載されている。
[先行技術文献]
[特許文献]
特許文献1 特開2019-175201号公報
特許文献2 特開2021-92840号公報
特許文献3 特開2019-78554号公報
特許文献4 国際公開第2020-165981号
特許文献5 国際公開第2019-188429号
特許文献6 特開2021-167770号公報
【発明の概要】
【発明が解決しようとする課題】
【0003】
ところで、予防安全技術においては、支援を行うための処理負荷が増大することが課題となる。本願は上記課題の解決のため、支援制御装置における処理負荷を軽減することを目的としたものである。そして、延いては持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0004】
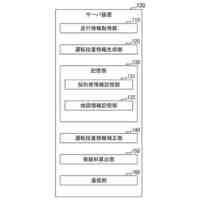
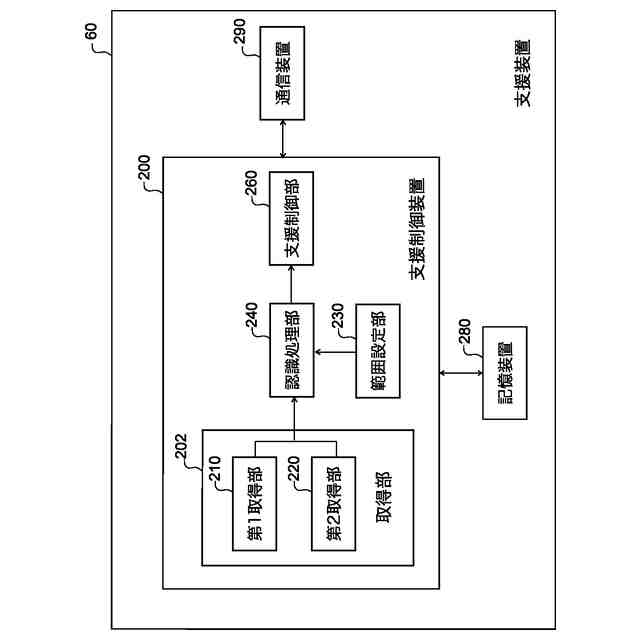
本発明の第1の態様においては、支援制御装置が提供される。支援制御装置は、撮像装置により撮像された画像から検出された第1移動物体の位置情報を取得する第1取得部を備える。支援制御装置は、第2移動物体のそれぞれにおいて測定された前記第2移動物体の位置情報を取得する第2取得部を備える。支援制御装置は、前記第1移動物体の位置情報と前記第2移動物体の位置情報とを、前記第1移動物体及び前記第2移動物体の組み合わせ毎に比較して、位置情報の一致度が予め定められた値より高い移動物体の組み合わせを1つの移動物体として認識する認識処理を行う認識処理部を備える。支援制御装置は、前記第1移動物体の位置情報及び前記第2移動物体の位置情報に前記認識処理を適用することよって得られた移動物体の位置情報に基づいて、移動物体に対する交通支援のための制御を行う支援制御部を備える。前記認識処理部は、前記第1移動物体の位置情報と前記第2移動物体の位置情報のうち前記認識処理の対象とする位置情報を、前記撮像装置の位置を基準として設定される予め定められた範囲内の位置情報に限定する。
【0005】
上記支援制御装置において、前記予め定められた範囲は、前記撮像装置の設置位置を含む予め定められた固定の範囲であってよい。
【0006】
上記いずれかの支援制御装置は、前記第1取得部によって取得された前記第1移動物体の位置情報のうち、前記予め定められた範囲内に定められた2軸の座標軸のそれぞれについて最外の座標成分を持つ少なくとも4つの位置情報を選択し、選択した位置情報のそれぞれを通る線で画定される範囲を、前記予め定められた範囲として設定する範囲設定部をさらに備えてよい。
【0007】
上記いずれかの支援制御装置において、前記認識処理部は、前記第1移動物体の位置情報が示す位置と前記第2移動物体の位置情報が示す位置とを、前記第1移動物体及び前記第2移動物体の組み合わせ毎に比較して、位置の一致度が予め定められた値より高い移動物体の組み合わせを1つの移動物体として認識してよい。
【0008】
上記いずれかの支援制御装置において、前記認識処理部は、前記位置の一致度が予め定められた時間にわたって予め定められた値より高い移動物体の組み合わせを1つの移動物体として認識してよい。
【0009】
上記いずれかの支援制御装置において、前記認識処理部はさらに、前記第1移動物体の位置情報の履歴から特定される移動方向と前記第2移動物体の位置情報の履歴から特定される移動方向とを、前記第1移動物体及び前記第2移動物体の組み合わせ毎に比較して、位置の一致度が予め定められた値より高く、かつ、移動方向の一致度が予め定められた値より高い移動物体の組み合わせを、1つの移動物体として認識してよい。
【0010】
上記いずれかの支援制御装置において、前記認識処理部は、位置の一致度が予め定められた時間にわたって予め定められた値より高く、かつ、移動方向の一致度が予め定められた時間にわたって予め定められた値より高い移動物体の組み合わせを、1つの移動物体として認識してよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
回転電機
3日前
本田技研工業株式会社
回転電機
3日前
本田技研工業株式会社
車両構造
26日前
本田技研工業株式会社
制御装置
24日前
本田技研工業株式会社
制御装置
24日前
本田技研工業株式会社
鞍乗型車両
17日前
本田技研工業株式会社
鞍乗り型車両
24日前
本田技研工業株式会社
電動駆動装置
3日前
本田技研工業株式会社
電動駆動装置
3日前
本田技研工業株式会社
電動駆動装置
3日前
本田技研工業株式会社
電気駆動装置
3日前
本田技研工業株式会社
固体二次電池
9日前
本田技研工業株式会社
運転評価装置
2日前
本田技研工業株式会社
画像処理装置
1日前
本田技研工業株式会社
着座部材構造
24日前
本田技研工業株式会社
蓄電システム
11日前
本田技研工業株式会社
保険料算出装置
2日前
本田技研工業株式会社
非水電解質電池
23日前
本田技研工業株式会社
ステアリング装置
3日前
本田技研工業株式会社
カメラの取付構造
23日前
本田技研工業株式会社
鞍乗り型電動車両
23日前
本田技研工業株式会社
燃料電池スタック
3日前
本田技研工業株式会社
燃料電池スタック
3日前
本田技研工業株式会社
通話サポート装置
23日前
本田技研工業株式会社
燃料電池用貼合方法
10日前
本田技研工業株式会社
接着剤塗布システム
10日前
本田技研工業株式会社
回転電機の制御装置
3日前
本田技研工業株式会社
二酸化炭素回収装置
1日前
本田技研工業株式会社
電極インクの塗工方法
2日前
本田技研工業株式会社
鞍乗型車両の排気装置
24日前
本田技研工業株式会社
動力伝達装置及び車両
1か月前
本田技研工業株式会社
外界センサの保持構造
10日前
本田技研工業株式会社
複合材構造体及び飛行体
1日前
本田技研工業株式会社
通信システム及びFPGA
9日前
本田技研工業株式会社
燃料電池スタックの製造装置
8日前
本田技研工業株式会社
エンドエフェクタ及びロボット
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ