TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025110088
公報種別
公開特許公報(A)
公開日
2025-07-28
出願番号
2024003817
出願日
2024-01-15
発明の名称
エンドエフェクタ及びロボット
出願人
本田技研工業株式会社
代理人
弁理士法人大島特許事務所
主分類
B25J
15/08 20060101AFI20250718BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 物体に接触して作業を行うエンドエフェクタであって、弾性変形可能な接触面を備えるとともに、接触面への接触を検知するためのセンサを効果的に保護することができるエンドエフェクタ、及び、そのエンドエフェクタを備えたロボットを提供する。
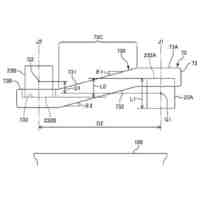
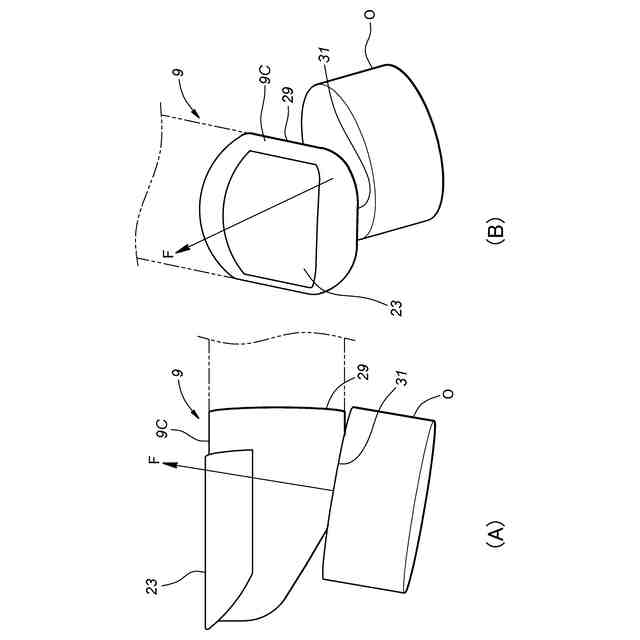
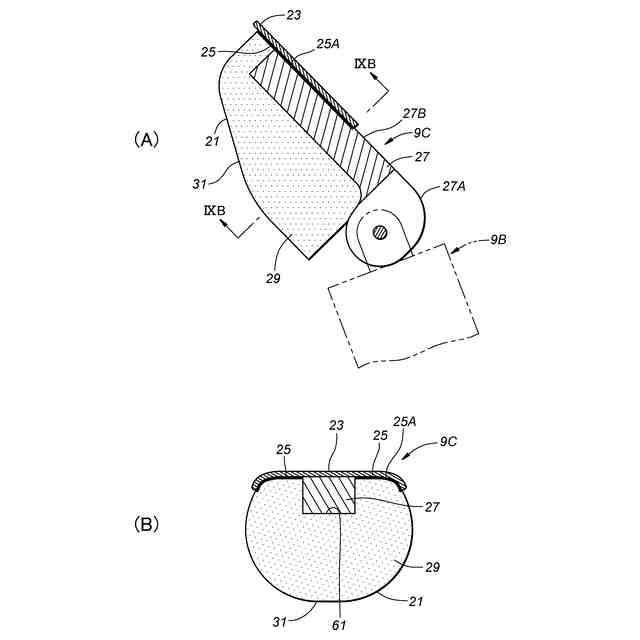
【解決手段】物体に接触することにより作業を行うエンドエフェクタ5であって、接触面31を構成する外面を有し、弾性変形可能な弾性部材29と、弾性部材を支持するフレーム27と、弾性部材に支持され、弾性部材よりも高い剛性を有する板状の剛性部材23と、剛性部材に取り付けられ、剛性部材に加わる負荷に係る物理量の空間分布を検出するセンサ25と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
物体に接触することにより作業を行うエンドエフェクタであって、
接触面を構成する外面を有し、弾性変形可能な弾性部材と、
前記弾性部材を支持するフレームと、
前記弾性部材に支持され、前記弾性部材よりも高い剛性を有する板状の剛性部材と、
前記剛性部材に取り付けられ、前記剛性部材に加わる負荷に係る物理量の空間分布を検出するセンサと、を備えるエンドエフェクタ。
続きを表示(約 670 文字)
【請求項2】
前記センサは前記剛性部材の前記接触面側の表面に設けられている請求項1に記載のエンドエフェクタ。
【請求項3】
前記フレームは前記弾性部材によって被覆された先端部を有する請求項1に記載のエンドエフェクタ。
【請求項4】
前記剛性部材は前記弾性部材を介して前記フレームに結合される請求項3に記載のエンドエフェクタ。
【請求項5】
前記フレームは前記剛性部材が直接結合し、且つ、前記弾性部材によって被覆された先端部を有する請求項1に記載のエンドエフェクタ。
【請求項6】
前記センサは、前記剛性部材に加わる圧力分布を検出する請求項1に記載のエンドエフェクタ。
【請求項7】
前記センサは、前記剛性部材の応力分布を検出する請求項1に記載のエンドエフェクタ。
【請求項8】
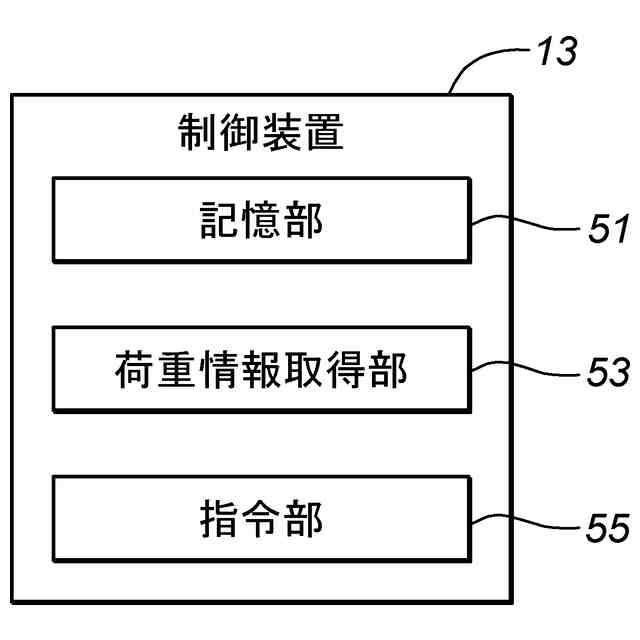
前記センサの出力に基づいて、前記接触面に作用する荷重に係る荷重情報を取得する制御装置を備える請求項1~請求項7のいずれか1つの項に記載のエンドエフェクタ。
【請求項9】
前記荷重情報は、前記荷重の作用点、前記荷重の大きさ、及び、前記荷重の向きのいずれか1つを含む請求項8に記載のエンドエフェクタ。
【請求項10】
請求項9に記載のエンドエフェクタを備えたロボットであって、
前記エンドエフェクタを変位させる駆動装置、を有し、
前記制御装置は前記荷重情報に基づいて、前記駆動装置への駆動指示を行うロボット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、物体に接触して作業を行うエンドエフェクタ及びそのエンドエフェクタを備えたロボットに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、エンドエフェクタとして、人間と同様に複数の指を備え、物体を把持するロボットハンドが知られている。このようなロボットハンドの把持対象物は必ずしも平坦な外面を有しているとは限らず、湾曲した外面を備えることもある。そのため、ロボットハンドの指部分(ロボット・フィンガー)の接触面は物体の形状に沿うよう弾性変形可能であることが望ましい。
【0003】
特許文献1は、レトログラフィック・センサを含むロボット・フィンガーを開示している。ロボット・フィンガーは、透明シェルと、透明シェルの外面に設けられ、透明エラストマー層と、透明エラストマー層を覆う半鏡面層と、透明シェルの内に光を放出する光源と、透明シェル内を撮像する撮像デバイスと、を備えている。光源から発せられた光は、透明シェルの内部を通過して半鏡面層によって反射される。撮像デバイスはその反射光を撮像画像として検出する。
【0004】
ロボット・フィンガーが物体に接触すると、半鏡面層の形状が変更される。これにより、撮像デバイスの撮像画像が変化する。この撮像画像の変化によって、ロボット・フィンガーの物体への接触検知が可能となる。
【先行技術文献】
【特許文献】
【0005】
米国特許第11703321号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1のロボット・フィンガーにおいては、半鏡面層の形状変化を大きくするため、半鏡面層は透明エラストマー層の外面に設けられる。しかしながら、物体への接触を繰り返すことにより半鏡面層が損傷し、物体への接触が適切に検出できなくなる虞がある。
【0007】
このように、ロボット・フィンガーにおいては、物体への接触を検出するためセンサを接触面近傍に配置することが望ましい。一方で、物体に接触する接触面近傍にセンサや検出構造(特許文献1の場合は半鏡面層)を配置すると、物体への繰り返しの接触等によりセンサや検出構造が損傷し、接触を適切に検出できなくなる虞がある。
【0008】
そこで、以上の背景に鑑み、本発明は、物体に接触して作業を行うエンドエフェクタであって、弾性変形可能な接触面を備えるとともに、接触面への接触を検知するためのセンサを効果的に保護することができるエンドエフェクタ、及び、そのエンドエフェクタを備えたロボットを提供することを課題とする。
【課題を解決するための手段】
【0009】
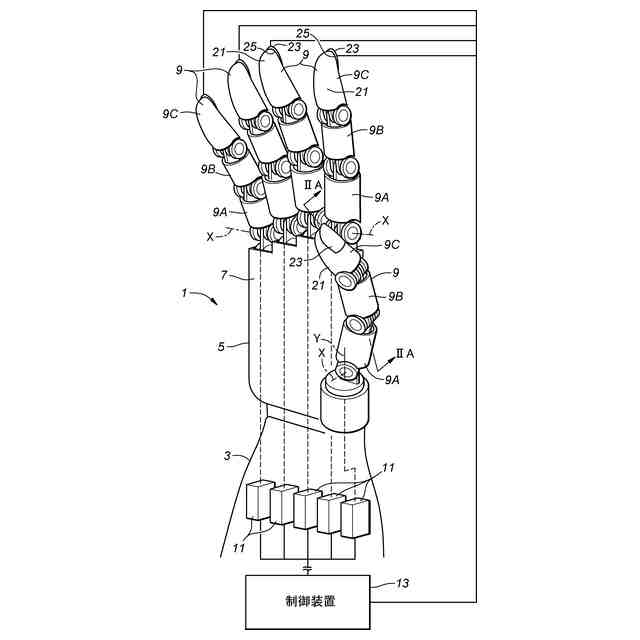
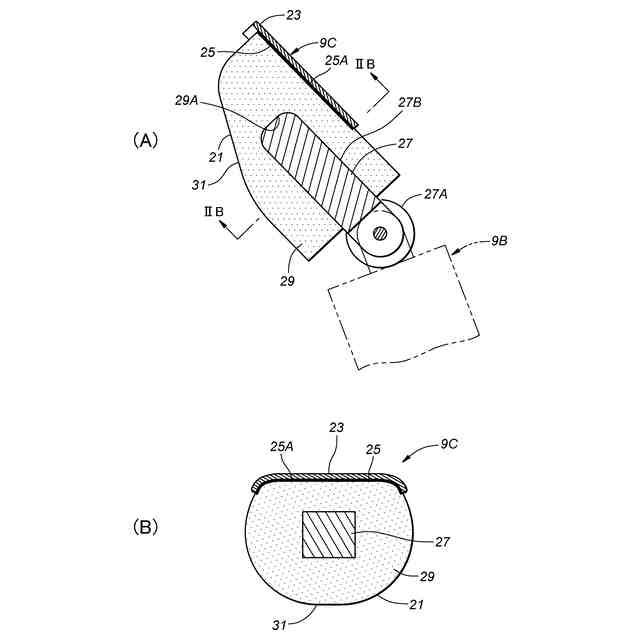
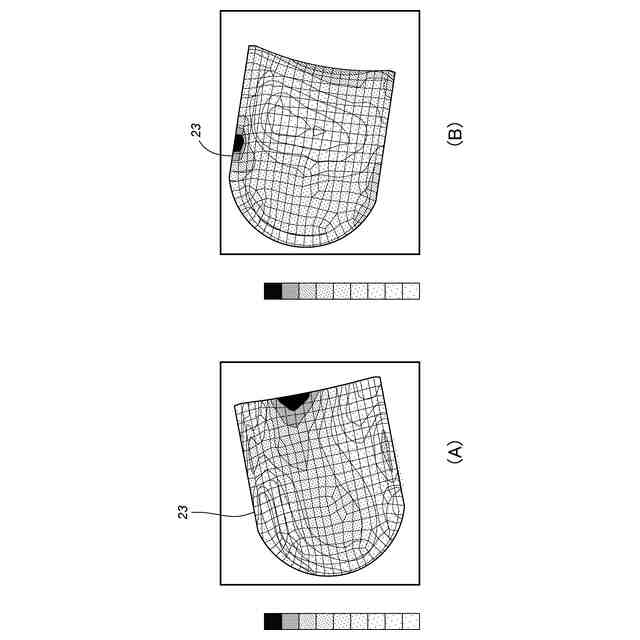
上記課題を解決するために本発明のある態様は、物体に接触することにより作業を行うエンドエフェクタ(5)であって、接触面(31)を構成する外面を有し、弾性変形可能な弾性部材(29)と、前記弾性部材を支持するフレーム(27)と、前記弾性部材に支持され、前記弾性部材よりも高い剛性を有する板状の剛性部材(23)と、前記剛性部材に取り付けられ、前記剛性部材に加わる負荷に係る物理量の空間分布を検出するセンサ(25)と、を備える。
【0010】
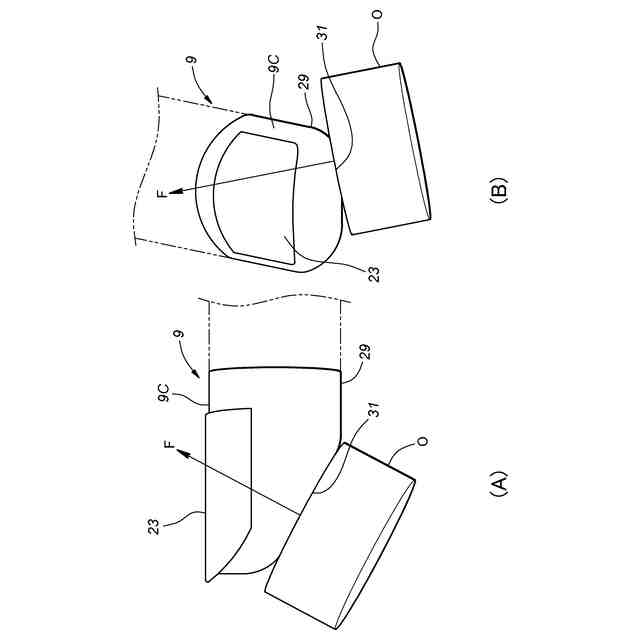
この態様によれば、弾性部材により接触面が構成される。接触面に物体が接触すると、接触面に加わる荷重が弾性部材を介して剛性部材に伝達される。よって、接触面への接触を剛性部材に取り付けられたセンサによって検知することができる。これにより、センサを接触面とは異なる位置に配置することが可能となるため、弾性変形可能な接触面を備えるとともに、接触面への接触を検知するためのセンサを効果的に保護することができるエンドエフェクタが提供される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
10日前
株式会社ザイテック
吸着装置
2か月前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社不二越
ロボットシステム
4日前
個人
ペグハンマおよびペグハンマ用部品
2か月前
住友重機械工業株式会社
教示装置
1か月前
川崎重工業株式会社
ロボット
1か月前
日本精工株式会社
締結用工具
7日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
ARMA株式会社
ジョイントフレーム
5日前
トヨタ自動車株式会社
カプラ接続治具
14日前
住友重機械工業株式会社
支援装置
2か月前
住友重機械工業株式会社
支援装置
2か月前
株式会社マキタ
電気機器
1か月前
積水ハウス株式会社
フィルム除去具
26日前
ホシデン株式会社
分解用治具
2か月前
オークラ輸送機株式会社
ハンド装置
2か月前
アピュアン株式会社
衝撃工具
2か月前
株式会社リコー
多関節ロボット
2か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
ダイハツ工業株式会社
移載治具
5日前
株式会社不二越
ロボットシステム
20日前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社清水製作所
電動工具の吊下げ具
1か月前
セイコーエプソン株式会社
ロボット
10日前
セイコーエプソン株式会社
ロボット
今日
コネクテッドロボティクス株式会社
保持システム
28日前
セイコーエプソン株式会社
ロボット
2か月前
セイコーエプソン株式会社
ロボット
4日前
北越メタル株式会社
鉄筋保持具
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ