TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016774
公報種別
公開特許公報(A)
公開日
2025-02-04
出願番号
2024195749,2022522620
出願日
2024-11-08,2020-10-14
発明の名称
無人航空機の自動ドッキング
出願人
スカイディオ,インコーポレイテッド
,
SKYDIO,INC.
代理人
弁理士法人川口國際特許事務所
主分類
B64U
70/97 20230101AFI20250128BHJP(航空機;飛行;宇宙工学)
要約
【課題】無人航空機(例えば、ドローン)用基地局への自動ドッキング技術を提供する。
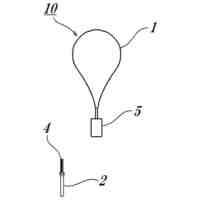
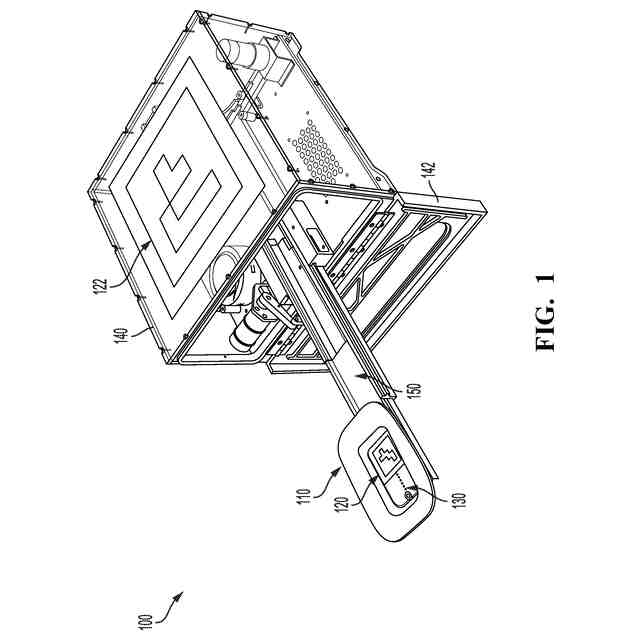
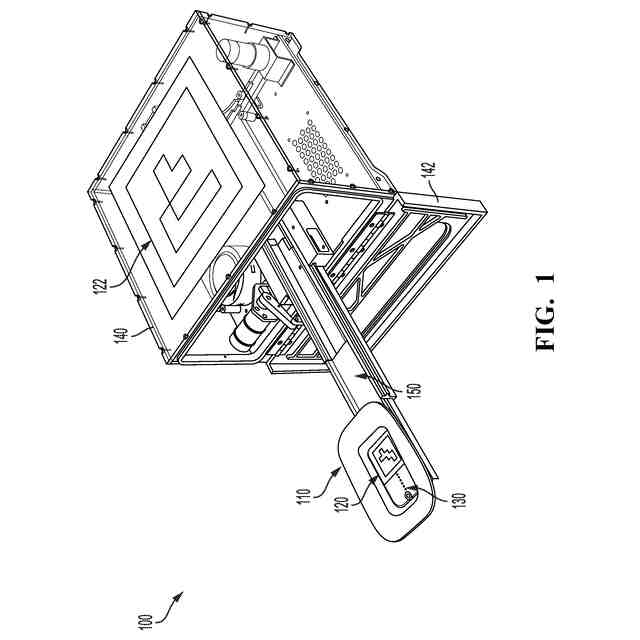
【解決手段】推進機構、画像センサ、および処理装置を含む無人航空機と;無人航空機を保持するように構成された着陸面110、および着陸面110上のフィデューシャル120を含むドック100とを備え、処理装置は:無人航空機がドック100の近傍にある第1の位置まで飛行するように推進機構を制御し;画像センサを用いて撮影された1つ以上の画像にアクセスし;1つ以上の画像のうちの少なくとも1つにおいてフィデューシャル120を検出し;1つ以上の画像に基づいてフィデューシャル120の姿勢を決定し;フィデューシャル120の姿勢に基づいて、無人航空機が着陸面110上に着陸するように推進機構を制御するように構成される。
【選択図】図1
特許請求の範囲
【請求項1】
推進機構、画像センサ、および処理装置を含む無人航空機と、
無人航空機を保持するように構成された着陸面、および着陸面上のフィデューシャルを含むドックと
を備えるシステムであって、処理装置は、
無人航空機がドックの近傍にある第1の場所まで飛行するように推進機構を制御し、
画像センサを用いて撮影された1つ以上の画像にアクセスし、
1つ以上の画像のうちの少なくとも1つにおいてフィデューシャルを検出し、
1つ以上の画像に基づいてフィデューシャルの姿勢を決定し、
フィデューシャルの姿勢に基づいて、無人航空機が着陸面上に着陸するように推進機構を制御する
ように構成される、システム。
続きを表示(約 1,400 文字)
【請求項2】
フィデューシャルがルートフィデューシャルであり、ルートフィデューシャルよりも大きい補助フィデューシャルをさらに含み、処理装置が、
1つ以上の画像のうちの少なくとも1つにおいて補助フィデューシャルを検出し、
1つ以上の画像に基づいて補助フィデューシャルの姿勢を決定し、
補助フィデューシャルの姿勢に基づいて、無人航空機が着陸面の近傍の第1の場所まで飛行するように推進機構を制御する
ように構成される、請求項1に記載のシステム。
【請求項3】
ドックが、第1の配置において着陸面を囲み、第2の配置において着陸面を露出させるように構成されたボックスを含み、補助フィデューシャルが、ボックスの外面に配置される、請求項2に記載のシステム。
【請求項4】
処理装置が、
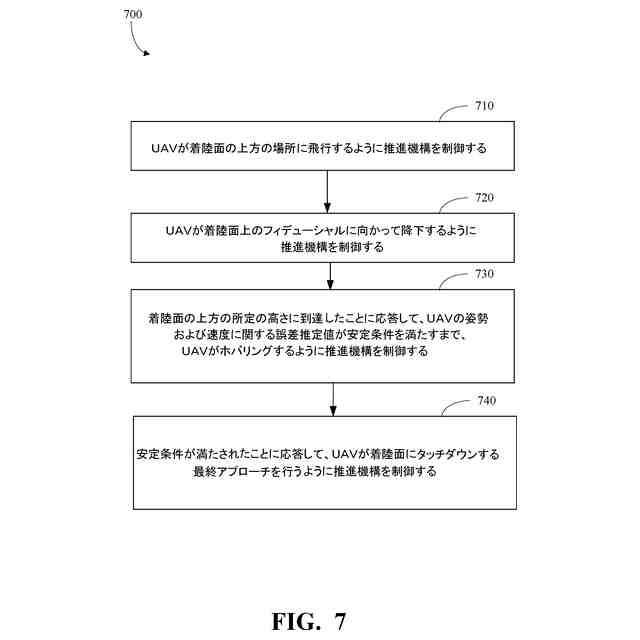
無人航空機が着陸面の上方の第2の場所まで飛行するように推進機構を制御し、
無人航空機が着陸面上のフィデューシャルに向かって降下するように推進機構を制御し、
着陸面の上方の所定の高さに到達したことに応答して、無人航空機の姿勢および速度の誤差推定値が安定条件を満たすまで、無人航空機が着陸面上の所定の高さでホバリングするように推進機構を制御し、
安定条件が満たされたことに応答して、無人航空機が着陸面にタッチダウンするための最終アプローチを行うように推進機構を制御する
ように構成される、請求項1から3のいずれか一項に記載のシステム。
【請求項5】
処理装置が、
最終アプローチが行われている間、無人航空機の慣性測定値を監視して、着陸面が適切に係合したかどうかを確認し、
着陸面が適切に係合されていないという決定に応答して、無人航空機を上昇させるように推進機構を制御することによって、最終アプローチを中止させる
ように構成される、請求項4に記載のシステム。
【請求項6】
ドックが格納式アームを含み、着陸面が格納式アームの端部に位置決めされる、請求項1から5のいずれか一項に記載のシステム。
【請求項7】
ドックが、ドックの第1の配置において着陸面を囲み、ドックの第2の配置において着陸面を露出させるように構成されたボックスを含み、
ドックが、ボックスのドアを開くこと、および格納式アームを伸ばして着陸面をボックスの内側からボックスの外側に移動させることを含むステップを行うことによって、第1の配置から第2の配置に自動的に移行するように構成される、請求項6に記載のシステム。
【請求項8】
推進機構がプロペラを含み、処理装置が、
着陸面上の無人航空機をボックスの中に引き込むために格納式アームが格納されている間にプロペラを回転させることによって、プロペラを自動的に折り畳む
ように構成される、請求項7に記載のシステム。
【請求項9】
ドックが、ボックスの上部内面に取り付けられ、無人航空機が格納式アームによってボックス内の静止位置に引き込まれる際に無人航空機の本体と係合するように位置決めされたソフトローラを含む、請求項7または8に記載のシステム。
【請求項10】
着陸面が、漏斗の底部において無人航空機の底面に適合する形状の漏斗形状を有する、請求項1から9のいずれか一項に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本出願は、2019年10月15日に出願された米国仮出願第62/915,639号の優先権を主張し、そのそれぞれの内容は、引用によりその全体が本明細書に組み込まれる。
続きを表示(約 3,200 文字)
【0002】
本開示は、無人航空機の自動ドッキングに関する。
【背景技術】
【0003】
以前の無人航空機(例えば、ドローン)用基地局は、通常、サービス対象となるドローンよりも一辺が少なくとも3倍以上大きい大型の筐体で構成される。ドローンは、通常、非常に正確な全地球測位システム(GPS)位置データの利用可能性に依存して、大きな基地局の外郭内のどこかに着陸し、その後、多関節ロボットアームがドローンのバッテリを物理的に交換できるように着陸パッド上でドローンを位置合わせする複雑な機械的方法、またはドローンをバッテリ充電できる電源装置に接続する何らかの他の方式に依存する。これらの従来のシステムは、大型で機械的に複雑で高価であり、GPSが使えない環境では適切に機能しない可能性がある。
【発明の概要】
【課題を解決するための手段】
【0004】
本開示は、添付の図面と併せて読むと、以下の詳細な説明から最もよく理解される。一般的な慣例に従って、図面の様々な対象物は、実物大ではないことが強調される。それどころか、様々な特徴の寸法は、明確にするために任意に拡大または縮小される。
【図面の簡単な説明】
【0005】
図1は、無人航空機の自律着陸を容易にするためのドックの一例の説明図である。
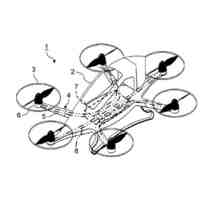
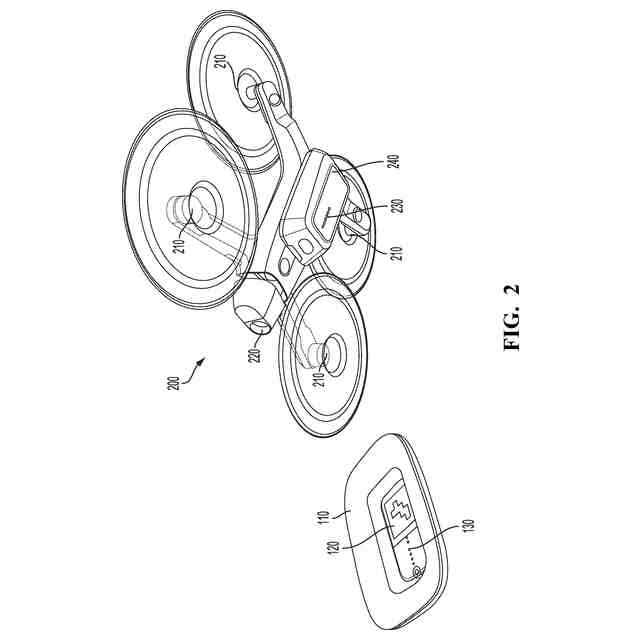
図2は、着陸面への自律着陸のために構成された無人航空機の一例の説明図である。
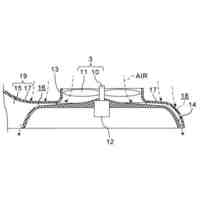
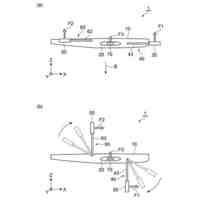
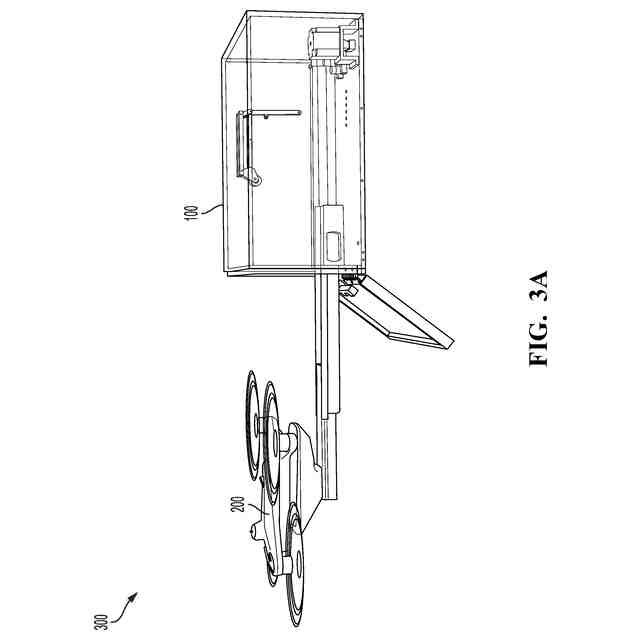
図3Aは、無人航空機の自律着陸を容易にするためのシステムの一例の説明図である。
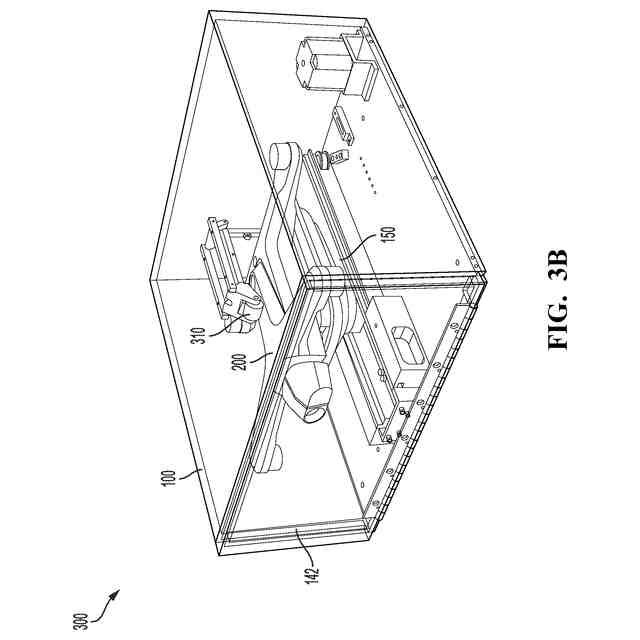
図3Bは、無人航空機がドック内に封入された状態で無人航空機の自律着陸を容易にするためのシステムの一例の説明図である。
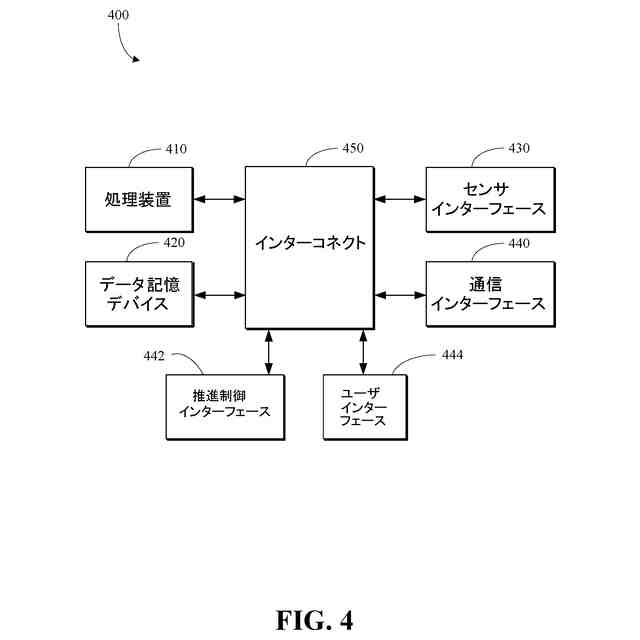
図4は、無人航空機のハードウェア構成の一例のブロック図である。
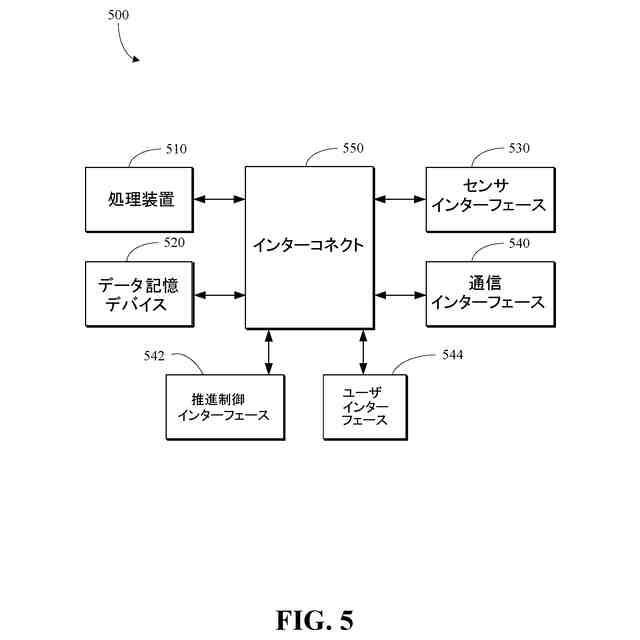
図5は、無人航空機用のドックのハードウェア構成の一例のブロック図である。
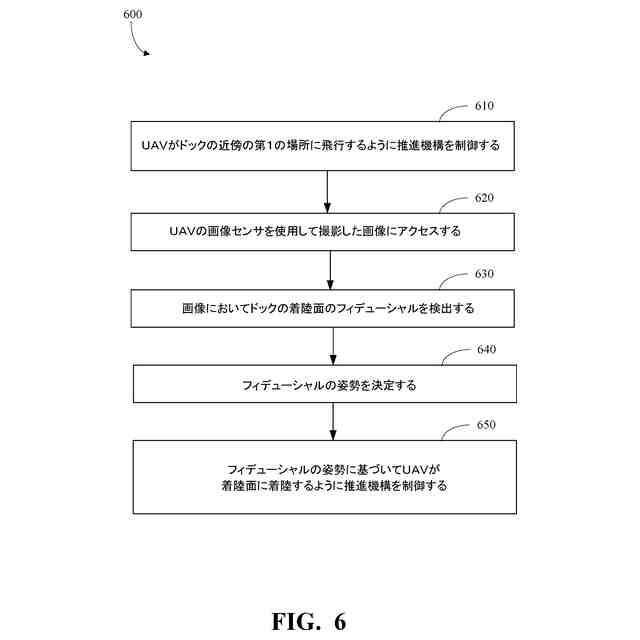
図6は、着陸面上の少なくとも1つのフィデューシャルを使用して無人航空機を自律的に着陸させるためのプロセスの一例のフローチャートである。
図7は、無人航空機を自律的に着陸させるためのプロセスの一例のフローチャートである。
図8は、無人航空機を自律的に着陸させるための最終アプローチを行うためのプロセスの一例のフローチャートである。
図9は、異なるスケールでのフィデューシャルのシーケンスを使用して無人航空機を自律的に着陸させるためのプロセスの一例のフローチャートである。
【発明を実施するための形態】
【0006】
自律型無人航空機の価値と課題の多くは、ロバストで完全な自律型ミッションを可能にすることにある。本明細書で開示されるのは、無人航空機(UAV)の無人の充電、離陸、着陸、およびミッション計画を可能にするドックプラットフォームである。いくつかの実装は、そのようなプラットフォームの信頼性の高い動作と、多種多様な消費者および商業アプリケーションによってシステムにアクセスできるようにする関連するアプリケーションプログラミングインターフェース設計とを可能にする。
【0007】
ドローンを動作させるための最大の制限要因の1つは、バッテリである。典型的なドローンは、新しいバッテリパックを必要とする前に20-30分間動作することができる。これは、自律型ドローンが人間の介入なしに動作できる時間に制限を設けるものである。バッテリパックが消耗すると、オペレーターはドローンを着陸させ、バッテリパックをフル充電されたものと交換しなければならない。バッテリ技術は改善され続け、より高いエネルギー密度を達成しているが、改善は段階的で、自律的な運用を持続するための明確なロードマップを描くことはできないかもしれない。定期的な人間の介入の必要性を軽減するアプローチは、ある種の自動化された基地局を使用してバッテリ管理動作を自動化することである。
【0008】
本明細書に開示されたいくつかの方法は、視覚追跡および制御ソフトウェアを活用して、はるかに小さいターゲットへのピンポイント着陸を行うことができる。基地局に対する絶対位置追跡を支援するために視覚的フィデューシャルを使用することによって、UAV(例えば、ドローン)を、様々な環境条件において5cm×5cmのターゲットに確実に当てることができる場合がある。これは、複雑な作動または大きな構造を必要とせずに、UAVの構造の残りの部分の下に延びるUAVのバッテリを一組の充電接点に導くのに役立つ、小さな受動的漏斗形状の助けによって、UAVを非常に正確に位置決めすることができることを意味する。これにより、基地局の基本的な実装は、一組のバネ接点と視覚タグを中に備えた漏斗状のネストで構成されるだけでよい。また、UAVが着陸時に遭遇する乱流の地面の影響を軽減するために、このネストを地面より高くし、ネスト自体の形状を着陸時にUAVのプロップウォッシュの中央に留まるように十分に小さくすることが可能である。GPSが使えない環境でも信頼性の高い動作を可能にするために、ネスト内のフィデューシャル(例えば、小さな視覚タグ)を、基地局近くの地面に敷かれた柔軟なマットや近くの壁に取り付けられたものなど、着陸ネストの外のどこかにあるより大きなフィデューシャル(例えば、大きな視覚タグ)で補うことができる。補助的な視覚タグは、UAVのミッションの過程で蓄積され得る視覚慣性オドメトリ(VIO)ナビゲーションドリフトにかかわらず、UAVがGPSを使えない環境において着陸ネストに対する絶対位置を再取得するために、かなり離れた場所からUAVによって容易に発見されることができる。最後に、UAVが広いエリアをカバーするためには、UAVとの信頼性の高い通信リンクが維持されなければならない。ほとんどの場合、理想的な着陸と充電の場所は送信機を配置するのに良い所ではないので、通信回路は、最大のカバレッジのために所望のミッション空間のどこか高いところと中心に理想的に置かれる別のレンジ-拡張モジュールに置かれることができる。
【0009】
このようなシステムの単純性および低コスト性は、より複雑で高価なバッテリ交換システムと比較した場合、バッテリが再充電される間にUAVが利用できない時間の量を補うものである。多くのユースケースでは間欠的な運用で十分であり、より多くのUAVカバレッジを必要とするユーザは、別のUAVと基地局システムを追加することでUAVの利用可能性を単純に増やすことができる。このような、より安く、より多くのアプローチは、大規模で高価なバッテリ交換システムに対してコスト競争力を持ち、また、単一障害点によるシステム全体の停止を排除することにより、システムの信頼性を大幅に向上させることができ得る。
【0010】
UAV(例えば、ドローン)を要素から保護する必要があるが、UAVがアクセスできる既存の構造物が利用できないユースケースについては、UAVネストを小さなカスタム小屋に組み入れることができる。この小屋は、風よけとして機能し、強風の中でもUAVが中に入って精密な着陸を行うことができる屋根のない玄関エリアに取り付けられた、UAVが下に着陸する屋根のあるセクションで構成することができる。このようなシェルターの有用な特徴の1つは、壁の下部の全周囲に沿った開放部または通気部で、ドローンの下降気流が内部を乱流的に循環して安定した飛行に悪影響を与えるのではなく、構造物を離れるようにすることである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
10か月前
個人
ドローンシステム
1か月前
株式会社三圓
浮上装置
5か月前
個人
空港用貨物搬送車
9か月前
個人
飛行艇
7か月前
個人
ドローンの計測操作方法3
5か月前
個人
垂直離着陸機用エンジン改
17日前
個人
ドローンの計測操作方法2
5か月前
キヤノン電子株式会社
磁気トルカ
6か月前
個人
人工衛星推進材循環エンジン
9か月前
個人
マルチコプター型電気飛行機
10か月前
個人
自由落下運航システム
11か月前
個人
空中移動システム
2か月前
個人
ドローン消音装置
3か月前
個人
ドローンを自動離着陸する方法
1か月前
株式会社セネック
ドローンポート
8か月前
株式会社中北製作所
羽ばたき装置
9か月前
株式会社SUBARU
電動航空機
9か月前
株式会社セネック
ドローンポート
8か月前
株式会社中北製作所
羽ばたき装置
9か月前
合同会社アドエア
飛行体の落下補助装置
2か月前
株式会社SUBARU
移動体
2か月前
個人
垂直離着陸機用ガスタービンエンジン
1か月前
株式会社SUBARU
回転翼航空機
9か月前
国立大学法人九州大学
飛行体
11か月前
全日本空輸株式会社
ドーリシステム
4か月前
HDサービス合同会社
カメラ装着装置
3か月前
SkyDeer株式会社
衛星制御方法
11か月前
株式会社SUBARU
構造体の製造方法
5か月前
株式会社SUBARU
構造体の製造方法
5か月前
株式会社日立製作所
推進装置
2か月前
本田技研工業株式会社
航空機
4か月前
本田技研工業株式会社
航空機
4か月前
株式会社デンソー
推進装置
6か月前
本田技研工業株式会社
移動体
6か月前
株式会社小糸製作所
航空機用灯具
5か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ