TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016555
公報種別
公開特許公報(A)
公開日
2025-02-04
出願番号
2024187047,2021001173
出願日
2024-10-24,2020-04-03
発明の名称
位置算出方法及び情報処理システム
出願人
株式会社センシンロボティクス
代理人
One ip弁理士法人
主分類
G06T
7/70 20170101AFI20250128BHJP(計算;計数)
要約
【課題】簡易に現場で飛行体の制御が可能な位置算出方法及び情報処理システムを提供すること。
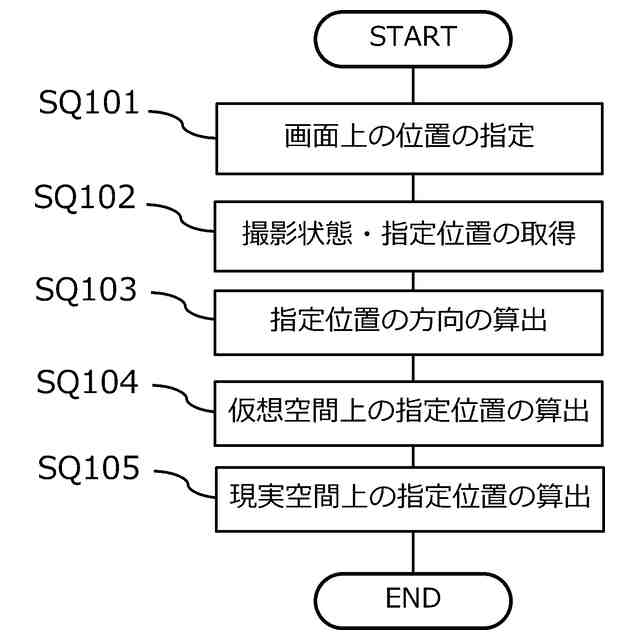
【解決手段】位置算出方法は、撮影画像上の所定の位置を指定するステップと、所定の位置に対応する二次元座標位置及び少なくとも撮影状態情報を取得するステップと、二次元座標位置と撮影状態情報に基づき、ユーザ端末位置から、二次元座標位置に対応する三次元座標位置への角度及び方位を算出するステップと、少なくともユーザ端末位置及び算出した角度及び方位を仮想空間内の三次元座標に対応付け、ユーザ端末位置から、算出された角度及び方位へ仮想的な直線を延ばした際に、直線と最初に接触した点データを、ユーザが指定した位置に対応する仮想指定位置として算出するステップと、仮想指定位置から指定位置の三次元座標位置を算出するステップと、を含む。
【選択図】図7
特許請求の範囲
【請求項1】
ユーザ端末の画面上で指定された位置の算出方法であって、
前記ユーザ端末の画面上で、撮影部により取得された撮影画像上の所定の位置を指定す
るステップと、
前記所定の位置に対応する前記ユーザ端末の画面上の二次元座標位置、及び、前記所定
の位置を指定した際の、少なくとも撮影画角、撮影角度、撮影方位、ユーザ端末位置情報
を含む撮影状態情報を受信するステップと、
前記二次元座標位置と前記撮影状態情報に基づき、前記ユーザ端末位置情報が示す三次
元座標位置から、前記ユーザ端末の画面上の二次元座標位置に対応する、三次元座標位置
への角度及び方位を算出するステップと、
少なくとも前記ユーザ端末位置情報が示す三次元座標位置、及び、前記算出された角度
及び方位を仮想空間内の三次元座標に対応付け、前記ユーザ端末位置情報が示す三次元座
標位置から、前記算出された角度及び方位へ仮想的な直線を延ばした際に、前記直線と最
初に接触した点データが示す三次元座標位置を、前記ユーザが指定した位置に対応する、
前記仮想空間内の仮想指定位置として算出するステップと、
前記仮想空間上の三次元座標と、現実空間上の三次元座標との対応関係に基づき、前記
仮想指定位置から現実空間上におけるユーザが指定した指定位置の三次元座標位置を算出
するステップと、を含む、
ことを特徴とする位置算出方法。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の位置算出方法であって、
前記点データは、仮想空間内の三次元点群データのうちの一つである、
ことを特徴とする位置算出方法。
【請求項3】
請求項1または2に記載の位置算出方法であって、
前記点データは、飛行体において記憶されている、
ことを特徴とする位置算出方法。
【請求項4】
請求項1または2に記載の位置算出方法であって、
前記点データは、ユーザ端末において記憶されている、
ことを特徴とする位置算出方法。
【請求項5】
請求項1ないし4に記載の位置算出方法であって、
前記撮影部は、ユーザ端末に備えられている、
ことを特徴とする位置算出方法。
【請求項6】
請求項1ないし4に記載の位置算出方法であって、
前記撮影部は、飛行体に備えられている、
ことを特徴とする位置算出方法。
【請求項7】
ユーザ端末の画面上で指定された位置を算出する情報処理システムであって、
前記情報処理システムは、撮影部と、指定位置情報取得部と、撮影状態情報受信部と、
位置算出部を備え、
前記指定位置情報取得部は、
前記ユーザ端末の画面上で、前記撮影部により取得された撮影画像上のユーザが指定し
た所定の位置に対応する前記ユーザ端末の画面上の二次元座標位置を取得し、
前記撮影状態情報受信部は、
前記所定の位置を指定した際の、少なくとも撮影画角、撮影角度、撮影方位、ユーザ端
末位置情報を含む撮影状態情報を受信し、
前記位置算出部は、
前記二次元座標位置と前記撮影状態情報に基づき、前記ユーザ端末位置情報が示す三次
元座標位置から、前記ユーザ端末の画面上の二次元座標位置に対応する、三次元座標位置
への角度及び方位を算出し、
少なくとも前記ユーザ端末位置情報が示す三次元座標位置、及び、前記算出された角度
及び方位を仮想空間内の三次元座標に対応付け、前記ユーザ端末位置情報が示す三次元座
標位置から、前記算出された角度及び方位へ仮想的な直線を延ばした際に、前記直線と最
初に接触した点データが示す三次元座標位置を、前記ユーザが指定した位置に対応する、
前記仮想空間内の仮想指定位置として算出し、
前記仮想空間上の三次元座標と、現実空間上の三次元座標との対応関係に基づき、前記
仮想指定位置から現実空間上におけるユーザが指定した指定位置の三次元座標位置を算出
する、
ことを特徴とする情報処理システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置算出方法及び情報処理システムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
近年、ドローン(Drone)や無人航空機(UAV:Unmanned Aeria
l Vehicle)などの飛行体(以下、「飛行体」と総称する)が産業に利用され始
めている。こうした中で、特許文献1には、プロポ等の専用装置による飛行体の制御方法
が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-093435号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1の開示技術では、プロポ等の専用装置による操作は容易
ではなく、特に点検等の作業のために飛行体を制御するためには熟練の技術が必要である
。
【0005】
一方で、事前に飛行経路を指定し、当該飛行経路に沿って自動的に飛行体を制御する方
法もあるが、現場外で飛行経路を指定することが通常であり、現場の状況に対する柔軟性
に欠けるものであった。
【0006】
本発明はこのような背景を鑑みてなされたものであり、簡易に現場で飛行体の制御が可
能な位置算出方法及び飛行制御方法、情報処理システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するための本発明の主たる発明は、ユーザ端末の画面上で指定された位
置の算出方法であって、前記ユーザ端末の画面上で、撮影部により取得された撮影画像上
の所定の位置を指定するステップと、前記所定の位置に対応する前記ユーザ端末の画面上
の二次元座標位置、及び、前記所定の位置を指定した際の、少なくとも撮影画角、撮影角
度、撮影方位、ユーザ端末位置情報を含む撮影状態情報を取得するステップと、前記二次
元座標位置と前記撮影状態情報に基づき、前記ユーザ端末位置情報が示す三次元座標位置
から、前記ユーザ端末の画面上の二次元座標位置に対応する、三次元座標位置への角度及
び方位を算出するステップと、少なくとも前記ユーザ端末位置情報が示す三次元座標位置
、及び、前記算出された角度及び方位を前記仮想空間内の三次元座標に対応付け、前記ユ
ーザ端末位置情報が示す三次元座標位置から、前記算出された角度及び方位へ仮想的な直
線を延ばした際に、前記直線と最初に接触した点データが示す三次元座標位置を、前記ユ
ーザが指定した位置に対応する、前記仮想空間内の仮想指定位置として算出するステップ
と、前記仮想空間上の三次元座標と、現実空間上の三次元座標との対応関係に基づき、前
記仮想指定位置から現実空間上におけるユーザが指定した指定位置の三次元座標位置を算
出するステップと、を含む、ことを特徴とする位置算出方法、である。
【発明の効果】
【0008】
本発明によれば、簡易に現場で飛行体の制御が可能な位置算出方法及び情報処理システ
ムを提供することができる。
【図面の簡単な説明】
【0009】
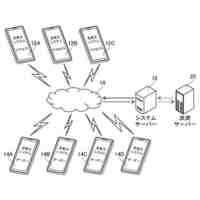
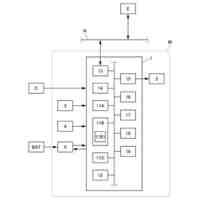
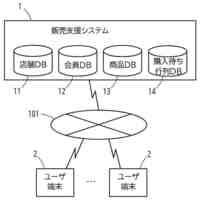
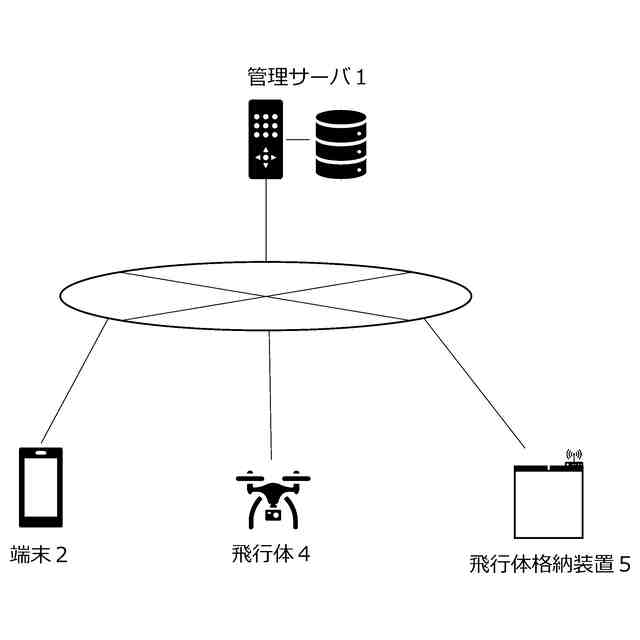
本発明の実施の形態にかかる管理システムの構成を示す図である。
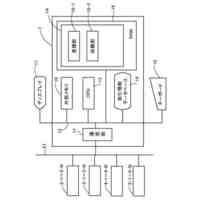
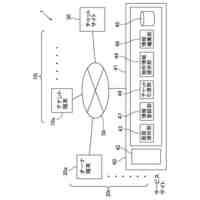
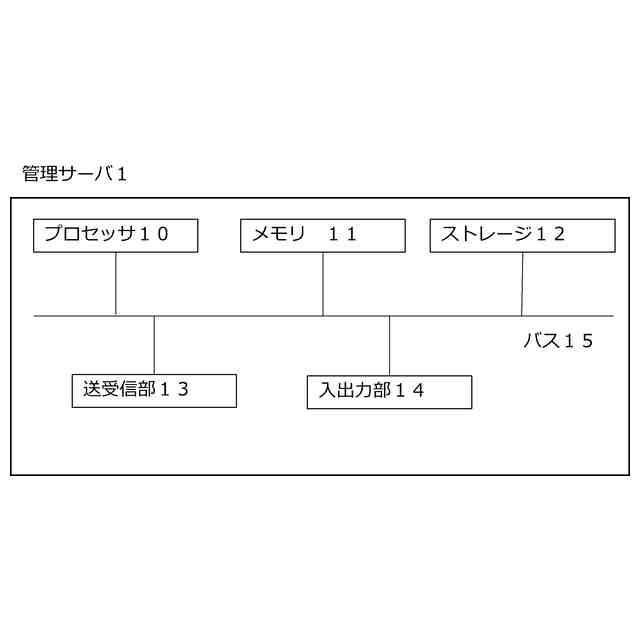
図1の管理サーバのハードウェア構成を示すブロック図である。
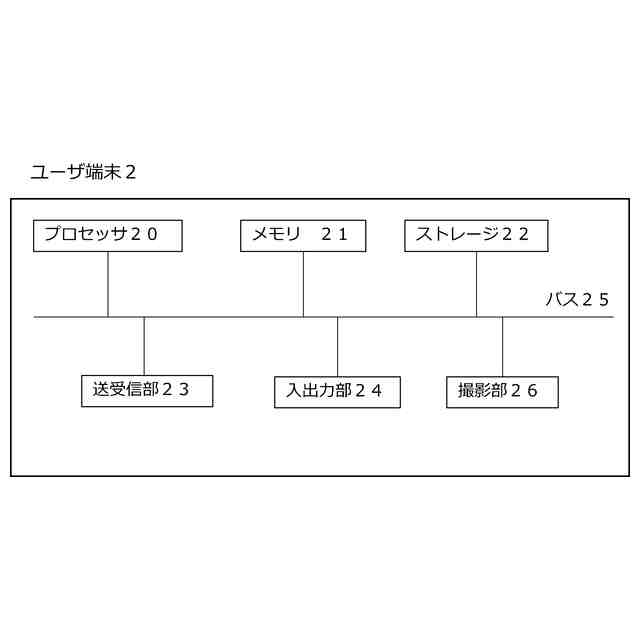
図1のユーザ端末のハードウェア構成を示すブロック図である。
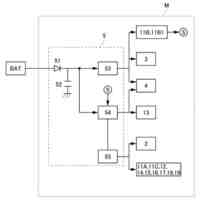
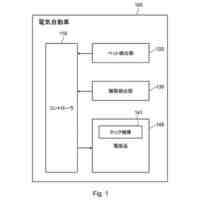
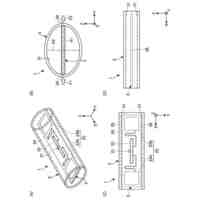
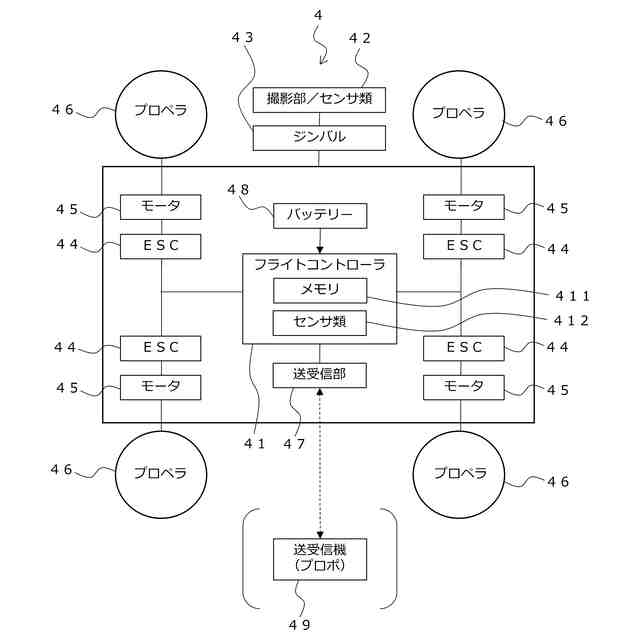
図1の飛行体のハードウェア構成を示すブロック図である。
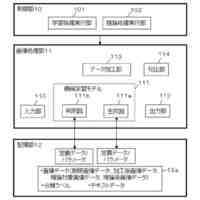
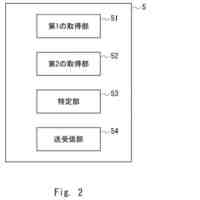
図1の管理サーバの機能を示すブロック図である。
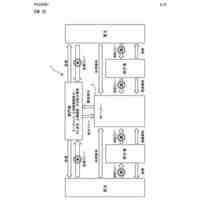
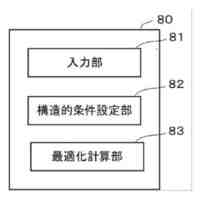
図5のパラメータ情報記憶部の構造を示すブロック図である。
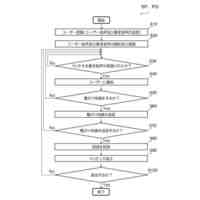
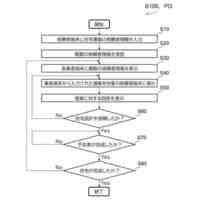
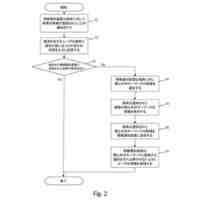
本発明の実施の形態にかかる飛行制御方法のフローチャートである。
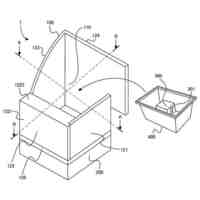
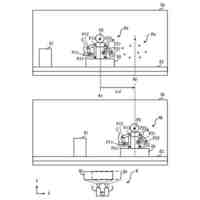
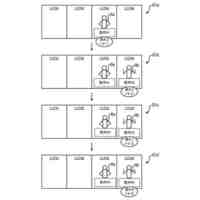
本発明の実施の形態にかかる位置算出方法に関する説明の一例を示す図である。
本発明の実施の形態にかかる位置算出方法に関する説明の一例を示す図である。
本発明の実施の形態にかかる位置算出方法に関する説明の一例を示す図である。
本発明の実施の形態にかかる位置算出方法に関する説明の一例を示す図である。
【発明を実施するための形態】
【0010】
本発明の実施形態の内容を列記して説明する。本発明の実施の形態による位置算出方法
及び情報処理システムは、以下のような構成を備える。
[項目1]
ユーザ端末の画面上で指定された位置の算出方法であって、
前記ユーザ端末の画面上で、撮影部により取得された撮影画像上の所定の位置を指定す
るステップと、
前記所定の位置に対応する前記ユーザ端末の画面上の二次元座標位置、及び、前記所定
の位置を指定した際の、少なくとも撮影画角、撮影角度、撮影方位、ユーザ端末位置情報
を含む撮影状態情報を受信するステップと、
前記二次元座標位置と前記撮影状態情報に基づき、前記ユーザ端末位置情報が示す三次
元座標位置から、前記ユーザ端末の画面上の二次元座標位置に対応する、三次元座標位置
への角度及び方位を算出するステップと、
少なくとも前記ユーザ端末位置情報が示す三次元座標位置、及び、前記算出された角度
及び方位を仮想空間内の三次元座標に対応付け、前記ユーザ端末位置情報が示す三次元座
標位置から、前記算出された角度及び方位へ仮想的な直線を延ばした際に、前記直線と最
初に接触した点データが示す三次元座標位置を、前記ユーザが指定した位置に対応する、
前記仮想空間内の仮想指定位置として算出するステップと、
前記仮想空間上の三次元座標と、現実空間上の三次元座標との対応関係に基づき、前記
仮想指定位置から現実空間上におけるユーザが指定した指定位置の三次元座標位置を算出
するステップと、を含む、
ことを特徴とする位置算出方法。
[項目2]
項目1に記載の位置算出方法であって、
前記点データは、仮想空間内の三次元点群データのうちの一つである、
ことを特徴とする位置算出方法。
[項目3]
項目1または2に記載の位置算出方法であって、
前記点データは、飛行体において記憶されている、
ことを特徴とする位置算出方法。
[項目4]
項目1または2に記載の位置算出方法であって、
前記点データは、ユーザ端末において記憶されている、
ことを特徴とする位置算出方法。
[項目5]
項目1ないし4に記載の位置算出方法であって、
前記撮影部は、ユーザ端末に備えられている、
ことを特徴とする位置算出方法。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
情報提示方法
1か月前
個人
自動精算システム
1か月前
個人
RFタグ読取装置
1か月前
個人
プログラム
24日前
個人
アカウントマップ
25日前
個人
プログラム
1か月前
個人
売買システム
1か月前
個人
管理サーバ
2か月前
個人
発想支援方法及びシステム
1か月前
個人
市場受発注システム
1か月前
日本精機株式会社
車両用表示装置
1か月前
個人
学習装置及び推論装置
24日前
個人
案件管理装置および端末装置
11日前
日本精機株式会社
車両用表示装置
1か月前
個人
分類処理プログラム及び方法
1か月前
井関農機株式会社
ロボット作業車両
1か月前
株式会社発明屋
電池指向の構造設計
18日前
富士通株式会社
金融システム
1か月前
個人
VRによる人体各部位の立体化
2か月前
トヨタ自動車株式会社
管理装置
19日前
トヨタ自動車株式会社
電気自動車
3日前
富士通株式会社
プロセッサ
17日前
株式会社イズミ
総合代行システム
7日前
個人
ダブルオークションシステム
7日前
株式会社プレニーズ
仲介システム
25日前
村田機械株式会社
人員配置システム
1か月前
トヨタ自動車株式会社
情報通知方法
1か月前
ブラザー工業株式会社
無線通信装置
1か月前
トヨタ自動車株式会社
作業評価装置
1か月前
富士通株式会社
予測
10日前
トヨタ自動車株式会社
作業管理装置
1か月前
個人
情報処理装置およびプログラム
2か月前
個人
販売支援システム
1か月前
株式会社SUBARU
車両用操作装置
3日前
AICRO株式会社
情報処理システム
1か月前
大王製紙株式会社
RFIDタグ
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ