TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025016205
公報種別
公開特許公報(A)
公開日
2025-01-31
出願番号
2023119335
出願日
2023-07-21
発明の名称
飛行体の位置推定システム、及び飛行体の位置推定方法
出願人
学校法人福岡工業大学
代理人
個人
,
個人
,
個人
,
個人
主分類
B64U
20/80 20230101AFI20250124BHJP(航空機;飛行;宇宙工学)
要約
【課題】飛行体の現在位置の推定精度を高め、飛行体が安定的に長時間飛行することができる飛行体の位置推定システム、及び飛行体の位置推定方法を提供することを目的とする。
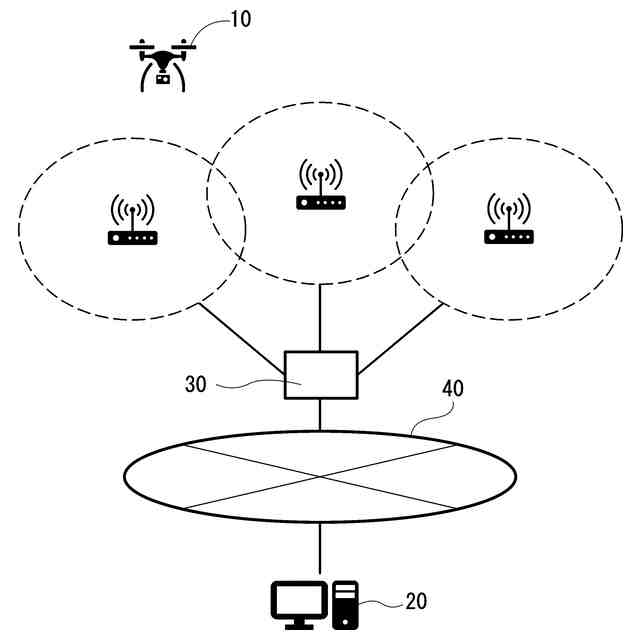
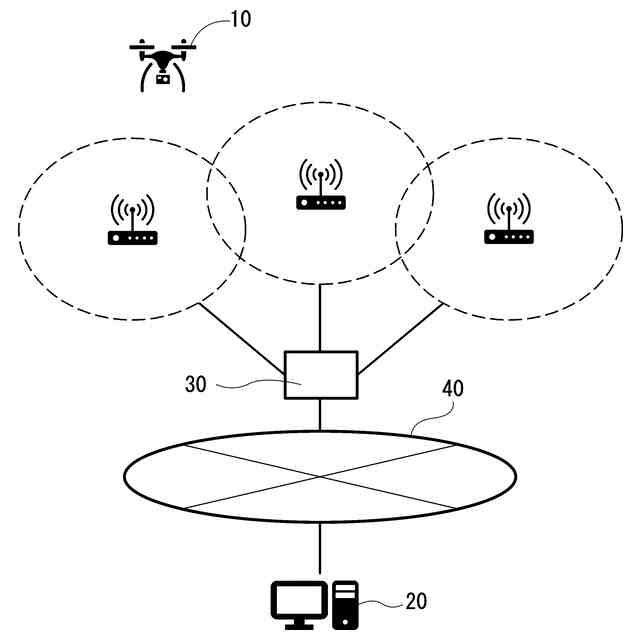
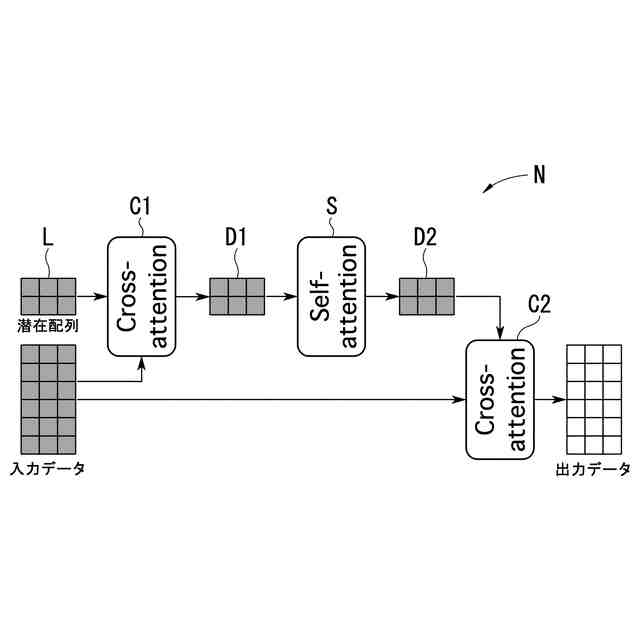
【解決手段】飛行体の位置推定システム20は、所定の飛行区域を飛行中の飛行体10に関する時系列データを入力値として、機械学習アルゴリズムNを実行することにより、現在の飛行体10の現在位置を推定する。機械学習アルゴリズムNは、入力クロスアテンション層C1、セルフアテンション層S、出力クロスアテンション層C2から構成され、時系列データを第1の配列データD1とする入力値とし、この第1の配列データD1を所定の重付係数に基づいて再構築して第2の配列データD2を生成する機能を有している。
【選択図】図1
特許請求の範囲
【請求項1】
所定のエリアを飛行中の飛行体に関する時系列データを無線通信により受信可能な通信部と、
該通信部で受信した前記時系列データを入力値として、所定の機械学習アルゴリズムを実行することにより前記飛行体の現在の飛行位置を推定する推定部と、を備える
飛行体の位置推定システム。
続きを表示(約 1,100 文字)
【請求項2】
前記推定部は、
前記時系列データを、所定の重付係数に基づいて再構築した配列データを生成する
請求項1に記載の飛行体の位置推定システム。
【請求項3】
前記推定部は、
前記入力値を所定の重付係数に基づいて圧縮した第1の配列データを生成する入力層と、
前記第1の配列データを再構築して第2の配列データを生成する中間層と、
前記第2の配列データを、前記入力値と同じサイズの出力値に変換する出力層と、を有する
請求項1または請求項2に記載の飛行体の位置推定システム。
【請求項4】
前記入力層、及び前記出力層は、クロスアテンション機構を用いたクロスアテンション処理を各1回実施し、
前記中間層は、セルフアテンション機構を用いたセルフアテンション処理を複数回実施する、
請求項3に記載の飛行体の位置推定システム。
【請求項5】
前記入力層は、前記入力値に基づくバイト配列を、該バイト配列よりもデータ数が小さい潜在配列でマッピングすることにより前記第1の配列データを生成する
請求項3に記載の飛行体の位置推定システム。
【請求項6】
前記無線通信は、LPWA(Low power wide area)方式である
請求項1または請求項2に記載の飛行体の位置推定システム。
【請求項7】
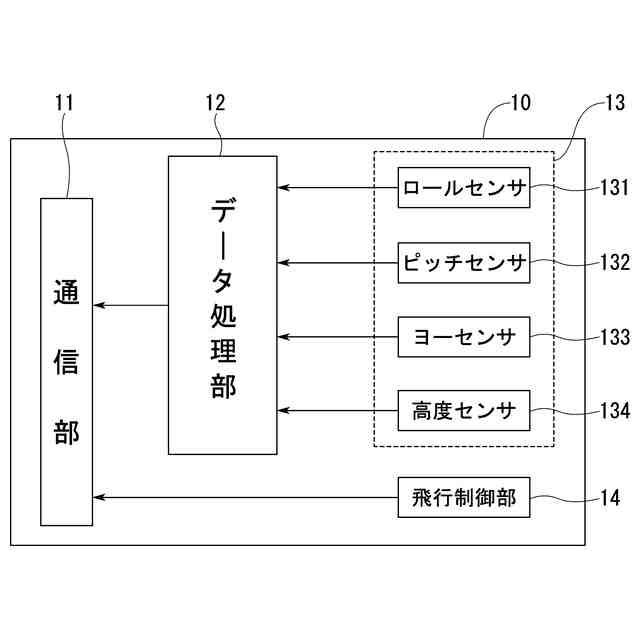
前記時系列データは、前記飛行体のロール角、ピッチ角、ヨー角、及び高度を含む
請求項1または請求項2に記載の飛行体の位置推定システム。
【請求項8】
前記機械学習アルゴリズムは、パーシーバ、或いはトランスフォーマである
請求項1または請求項2に記載の飛行体の位置推定システム。
【請求項9】
所定のエリアを飛行中の飛行体に関する時系列データを無線通信により受信するステップと、
受信した前記時系列データを入力値として所定の機械学習アルゴリズムを実行することにより、前記飛行体の現在位置を推定するステップと、を備える
飛行体の位置推定方法。
【請求項10】
前記飛行体の現在位置を推定するステップは、
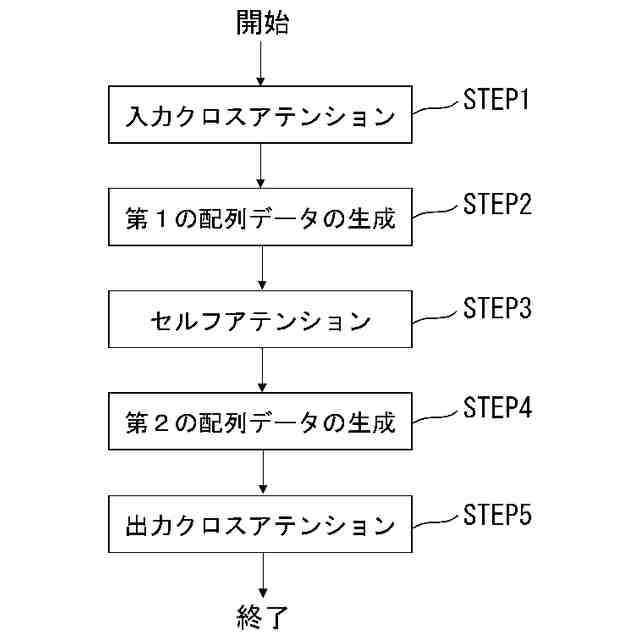
前記入力値を所定の重付係数に基づいて圧縮した第1の配列データを生成するステップと、
前記第1の配列データを再構築して第2の配列データを生成するステップと、
前記第2の配列データを、前記入力値と同じサイズの出力値に変換するステップと、を有する
請求項9に記載の飛行体の位置推定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行体の位置推定システム、及び飛行体の位置推定方法に関する。詳しくは、飛行体の現在位置の推定精度を高め、飛行体が安定的に長時間飛行することができる飛行体の位置推定システム、及び飛行体の位置推定方法に係るものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
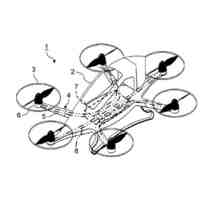
無人飛行機やドローン等の無人飛行体は、自律飛行を行う上での安全確保のため、飛行中における自機の現在位置をリアルタイムで取得する必要がある。無人飛行体の現在位置の取得には、例えば人工衛星から送られてくるGPS信号を無人飛行体に搭載されたGPS装置で受信する方法や、無人飛行体に搭載された加速度センサやジャイロセンサ等の慣性航法装置に基づいて移動距離や方角のベクトルを細分点ごとに合成することで、起点からの飛行ルートを算出する方法が採用されている。
【0003】
しかしGPS装置は、橋梁の下やビルの屋内のようにGPS信号が届きにくい環境では安定して位置情報を取得することができない。また慣性航法装置は、移動距離に伴う誤差の累積が大きく、安全な飛行を維持することが可能な飛行距離は限定されてしまう。
【0004】
そのため、こうした環境下で無人飛行体を安全に長時間飛行させる場合には、飛行中に人が無人飛行体を目視により監視する必要がある。また、自律飛行や自動制御が困難な場合には、手動による遠隔制御に切り換えて飛行を補助する必要がある。しかしながら、人による監視や操縦の場合には、負担が大きいとともにヒューマンエラーによる見落としや操縦ミスにより重大な事故の原因となる。そこで、無人飛行体の正確な現在位置を取得できるようにするための様々な技術が提案されている。
【0005】
例えば特許文献1には、無人飛行体に搭載された撮像装置で撮像したオブジェクトに基づいて、現在の飛行位置を把握するシステムが開示されている。具体的には、基準位置において撮像した基準オブジェクトと、被測定位置において撮像した被測定オブジェクトとを比較し、二次元位置偏差と三次元角度偏差に基づいて、被測定位置の基準位置からの三次元変位を検出することで自機の現在位置を推定するというものである。
【先行技術文献】
【特許文献】
【0006】
特開2020-176961
【発明の概要】
【発明が解決しようとする課題】
【0007】
前記特許文献1によれば、GPS信号が届きにくい環境下においても自機の飛行位置を把握することができるとともに、慣性航法装置のように移動距離に伴う誤差も生じないため、長時間の飛行でも常に安定的に自機の位置を把握することができる。
【0008】
しかしながら、撮像装置により撮像した画像に基づいて自機の飛行位置を取得する場合、画像処理のための演算が必要となり、演算負荷や演算時間が長時間となる。それに伴い、無人飛行体の電池消費量も大きくなるため、やはり飛行時間が制限されてしまう。
【0009】
本発明は、以上の点に鑑みて創案されたものであり、飛行体の現在位置の推定精度を高め、飛行体が安定的に長時間飛行することができる飛行体の位置推定システム、及び飛行体の位置推定方法を提供することを目的とするものである。
【課題を解決するための手段】
【0010】
前記の目的を達成するために、本発明の飛行体の位置推定システムは、所定のエリアを飛行中の飛行体に関する時系列データを無線通信により受信可能な通信部と、該通信部で受信した前記時系列データを入力値として、所定の機械学習アルゴリズムを実行することにより前記飛行体の現在の飛行位置を推定する推定部とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
10か月前
個人
ドローンシステム
1か月前
株式会社三圓
浮上装置
5か月前
個人
空港用貨物搬送車
9か月前
個人
飛行艇
7か月前
個人
ドローンの計測操作方法3
5か月前
個人
垂直離着陸機用エンジン改
18日前
個人
ドローンの計測操作方法2
5か月前
キヤノン電子株式会社
磁気トルカ
6か月前
個人
人工衛星推進材循環エンジン
9か月前
個人
マルチコプター型電気飛行機
10か月前
個人
自由落下運航システム
11か月前
個人
空中移動システム
2か月前
個人
ドローン消音装置
3か月前
個人
ドローンを自動離着陸する方法
1か月前
株式会社セネック
ドローンポート
8か月前
株式会社中北製作所
羽ばたき装置
10か月前
株式会社SUBARU
電動航空機
9か月前
株式会社セネック
ドローンポート
8か月前
株式会社中北製作所
羽ばたき装置
9か月前
合同会社アドエア
飛行体の落下補助装置
2か月前
株式会社SUBARU
移動体
2か月前
個人
垂直離着陸機用ガスタービンエンジン
1か月前
株式会社SUBARU
回転翼航空機
9か月前
国立大学法人九州大学
飛行体
11か月前
全日本空輸株式会社
ドーリシステム
4か月前
HDサービス合同会社
カメラ装着装置
3か月前
SkyDeer株式会社
衛星制御方法
11か月前
株式会社SUBARU
構造体の製造方法
5か月前
株式会社SUBARU
構造体の製造方法
5か月前
株式会社日立製作所
推進装置
2か月前
本田技研工業株式会社
航空機
4か月前
本田技研工業株式会社
航空機
4か月前
株式会社デンソー
推進装置
7か月前
本田技研工業株式会社
移動体
6か月前
株式会社小糸製作所
航空機用灯具
5か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ