TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025015616
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2024198202,2024001610
出願日
2024-11-13,2018-11-20
発明の名称
三次元データ符号化方法、三次元データ復号方法、三次元データ符号化装置、及び三次元データ復号装置
出願人
パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ
,
Panasonic Intellectual Property Corporation of America
代理人
個人
,
個人
,
個人
主分類
G06T
9/40 20060101AFI20250123BHJP(計算;計数)
要約
【課題】三次元点を選択的に復号可能なビットストリームを生成する。
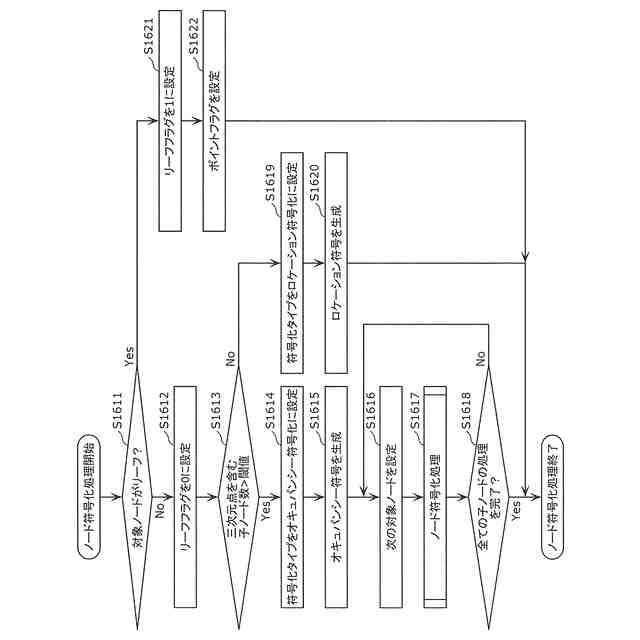
【解決手段】三次元データ符号化方法は、複数の三次元点のN(Nは2以上の整数)分木構造を符号化したデータを生成し、データを含むビットストリームを生成し、データの生成において、第1モードを用いて対象ノードを符号化する場合、対象ノード内の三次元点の残り位置を示すビット情報を符号化し(S1620)、第2モードを用いて対象ノードを符号化する場合、対象ノード内の各子ノードの存在を示すNビット情報を符号化する(S1615)。
【選択図】図85
特許請求の範囲
【請求項1】
複数の三次元点のN(Nは2以上の整数)分木構造を符号化したデータを生成し、
前記データを含むビットストリームを生成し、
前記データの生成において、
第1モードを用いて対象ノードを符号化する場合、前記対象ノード内の三次元点の残り位置を示すビット情報を符号化し、
第2モードを用いて前記対象ノードを符号化する場合、前記対象ノード内の各子ノードの存在を示すNビット情報を符号化する、
三次元データ符号化方法。
続きを表示(約 920 文字)
【請求項2】
前記Nは8である、
請求項1記載の三次元データ符号化方法。
【請求項3】
前記対象ノードに含まれる三次元点の数が予め定められた閾値以下の場合、前記第1モードを用いて前記対象ノードを符号化する
請求項1記載の三次元データ符号化方法。
【請求項4】
前記対象ノードに含まれる三次元点の数が予め定められた閾値より大きい場合、前記第1モードを用いずに前記対象ノードを符号化する
請求項1記載の三次元データ符号化方法。
【請求項5】
前記対象ノードに含まれる三次元点の数が予め定められた閾値より大きい場合、前記第2モードを用いて前記対象ノードを符号化する
請求項1記載の三次元データ符号化方法。
【請求項6】
前記N分木構造の一部に前記第1モードを用い、前記N分木構造の他の一部に前記第2モードを用いる
請求項1乃至5のいずれか1項記載の三次元データ符号化方法。
【請求項7】
ビットストリームから、複数の三次元点のN(Nは2以上の整数)分木構造が符号化されたデータを復号し、
前記データの復号において、
第1モードを用いて対象ノードを復号する場合、前記対象ノード内の三次元点の残り位置を示すビット情報を復号し、
第2モードを用いて前記対象ノードを復号する場合、前記対象ノード内の各子ノードにそれぞれ対応するNビット情報を復号する、
三次元データ復号方法。
【請求項8】
前記Nは8である、
請求項7記載の三次元データ復号方法。
【請求項9】
前記対象ノードに含まれる三次元点の数が予め定められた閾値以下の場合、前記第1モードを用いて前記対象ノードを復号する
請求項7記載の三次元データ復号方法。
【請求項10】
前記対象ノードに含まれる三次元点の数が予め定められた閾値より大きい場合、前記第1モードを用いずに前記対象ノードを復号する
請求項7記載の三次元データ復号方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、三次元データ符号化方法、三次元データ復号方法、三次元データ符号化装置、及び三次元データ復号装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
自動車或いはロボットが自律的に動作するためのコンピュータビジョン、マップ情報、監視、インフラ点検、又は、映像配信など、幅広い分野において、今後、三次元データを活用した装置又はサービスの普及が見込まれる。三次元データは、レンジファインダなどの距離センサ、ステレオカメラ、又は複数の単眼カメラの組み合わせなど様々な方法で取得される。
【0003】
三次元データの表現方法の1つとして、三次元空間内の点群によって三次元構造の形状を表すポイントクラウドと呼ばれる表現方法がある。ポイントクラウドでは、点群の位置と色とが格納される。ポイントクラウドは三次元データの表現方法として主流になると予想されるが、点群はデータ量が非常に大きい。よって、三次元データの蓄積又は伝送においては二次元の動画像(一例として、MPEGで規格化されたMPEG-4 AVC又はHEVCなどがある)と同様に、符号化によるデータ量の圧縮が必須となる。
【0004】
また、ポイントクラウドの圧縮については、ポイントクラウド関連の処理を行う公開のライブラリ(Point Cloud Library)などによって一部サポートされている。
【0005】
また、三次元の地図データを用いて、車両周辺に位置する施設を検索し、表示する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
国際公開第2014/020663号
【発明の概要】
【発明が解決しようとする課題】
【0007】
三次元データの符号化において、三次元点を選択的に復号可能なビットストリームを生成できることが望まれている。
【0008】
本開示は、三次元点を選択的に復号可能なビットストリームを生成できる三次元データ符号化方法或いは三次元データ符号化装置、又は、三次元点を選択的に復号可能な三次元データ復号方法或いは三次元データ復号装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本開示の一態様に係る三次元データ符号化方法は、複数の三次元点のN(Nは2以上の整数)分木構造を符号化したデータを生成し、前記データを含むビットストリームを生成し、前記データの生成において、第1モードを用いて対象ノードを符号化する場合、前記対象ノード内の三次元点の残り位置を示すビット情報を符号化し、第2モードを用いて前記対象ノードを符号化する場合、前記対象ノード内の各子ノードの存在を示すNビット情報を符号化する。
【0010】
本開示の一態様に係る三次元データ復号方法は、ビットストリームから、複数の三次元点のN(Nは2以上の整数)分木構造が符号化されたデータを復号し、前記データの復号において、第1モードを用いて対象ノードを復号する場合、前記対象ノード内の三次元点の残り位置を示すビット情報を復号し、第2モードを用いて前記対象ノードを復号する場合、前記対象ノード内の各子ノードにそれぞれ対応するNビット情報を復号する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
情報提示方法
17日前
個人
アカウントマップ
10日前
個人
自動精算システム
25日前
個人
プログラム
16日前
個人
RFタグ読取装置
1か月前
個人
プログラム
9日前
個人
売買システム
1か月前
個人
管理サーバ
1か月前
個人
発想支援方法及びシステム
20日前
個人
市場受発注システム
23日前
日本精機株式会社
車両用表示装置
1か月前
個人
学習装置及び推論装置
9日前
日本精機株式会社
車両用表示装置
1か月前
個人
分類処理プログラム及び方法
20日前
富士通株式会社
金融システム
17日前
井関農機株式会社
ロボット作業車両
25日前
株式会社発明屋
電池指向の構造設計
3日前
個人
VRによる人体各部位の立体化
1か月前
トヨタ自動車株式会社
管理装置
4日前
トヨタ自動車株式会社
推定装置
1か月前
キヤノン株式会社
情報処理装置
1か月前
富士通株式会社
プロセッサ
2日前
株式会社プレニーズ
仲介システム
10日前
トヨタ自動車株式会社
記号識別方法
1か月前
個人
販売支援システム
25日前
村田機械株式会社
人員配置システム
20日前
ブラザー工業株式会社
無線通信装置
23日前
トヨタ自動車株式会社
情報通知方法
23日前
トヨタ自動車株式会社
作業評価装置
1か月前
個人
情報処理装置およびプログラム
1か月前
トヨタ自動車株式会社
作業評価装置
1か月前
トヨタ自動車株式会社
画像処理装置
1か月前
トヨタ自動車株式会社
作業管理装置
23日前
トヨタ自動車株式会社
習熟度判定装置
1か月前
トヨタ自動車株式会社
生成装置
17日前
大王製紙株式会社
RFIDタグ
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ