TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025015148
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023118336
出願日
2023-07-20
発明の名称
駐車支援装置、駐車支援方法、および駐車支援プログラム
出願人
パナソニックオートモーティブシステムズ株式会社
代理人
弁理士法人鷲田国際特許事務所
主分類
B60W
30/06 20060101AFI20250123BHJP(車両一般)
要約
【課題】停車を必要とせず、スムーズに自動駐車を行うことが可能な駐車支援装置および駐車支援方法を提供する。
【解決手段】駐車支援装置は、駐車枠を検知する駐車枠検知部と、車両の乗員の駐車指示操作を受け付ける操作受付部と、駐車指示操作に符合する駐車枠に車両を自動駐車させる走行制御部と、を備え、駐車枠が車両の進行方向の左右いずれか一方向だけにあるか、または、駐車指示操作が方向の指示を含む駐車指示操作であり、駐車指示操作が指示する方向に駐車枠があるか、のいずれかの場合であって、かつ、駐車枠が車両の進行方向の所定の範囲にある場合に、駐車枠が駐車指示操作に符合すると判定する。
【選択図】図8
特許請求の範囲
【請求項1】
駐車枠を検知する駐車枠検知部と、
車両の乗員の駐車指示操作を受け付ける操作受付部と、
前記駐車指示操作に符合する駐車枠に前記車両を自動駐車させる走行制御部と、
を備え、
前記駐車枠が前記車両の進行方向の左右いずれか一方向だけにあるか、または、前記駐車指示操作が方向の指示を含む駐車指示操作であり、前記駐車指示操作が指示する方向に前記駐車枠があるか、のいずれかの場合であって、かつ、前記駐車枠が前記車両の進行方向の所定の範囲にある場合に、前記駐車枠が前記駐車指示操作に符合すると判定する駐車支援装置。
続きを表示(約 1,200 文字)
【請求項2】
前記駐車指示操作は、ハンドルを回転する操作、ウインカレバーを倒す操作、ハザードランプの点灯、ブレーキペダルの操作、所定のボタン操作のうち、少なくとも一つを含む操作であり、
前記方向の指示を含む駐車指示操作は、ハンドルを回転する操作、ウインカレバーを倒す操作、所定のボタンの操作のうち、少なくとも一つを含む操作である請求項1に記載の駐車支援装置。
【請求項3】
前記駐車指示操作を受け付けた時に、前記駐車指示操作に符合する駐車枠を検出していない場合は、前記駐車枠が前記駐車指示操作に符合するか否かの判定を保留する、請求項1に記載の駐車支援装置。
【請求項4】
前記判定の保留中に所定の時間が経過した場合、または、前記判定の保留中に所定の距離を走行した場合は、前記駐車指示操作の受け付けを取り消し、前記自動駐車を行わない、請求項3に記載の駐車支援装置。
【請求項5】
ハンドルまたはウインカレバーを中立方向に戻す操作、または、所定角を越えてハンドルを回転する操作、または、ハザードランプの消灯、または、アクセルペダルの操作、または、前記駐車指示を取り消すボタン操作、のうち少なくとも一つを検出した場合は、否認動作があったと判定し、前記否認動作があった場合は、前記自動駐車を行わない、請求項1または請求項3に記載の駐車支援装置。
【請求項6】
前記駐車指示操作に符合する駐車枠を検出していない場合は、前記駐車指示操作に符合する駐車枠を検出している場合よりも、前記否認動作があったと判定し易くする、請求項5に記載の駐車支援装置。
【請求項7】
前記駐車枠検知部により検出された駐車枠に対応する所定の転舵点を設定し、前記所定の転舵点は、前記車両が前記駐車枠に収まる経路の旋回開始位置であって、前記所定の範囲の終端を前記所定の転舵点に基づいて設定する、請求項1に記載の駐車支援装置。
【請求項8】
前記走行制御部は、前記駐車指示操作が行われるまで、前記車両が前記所定の転舵点を越えないように車速を制御する、請求項7に記載の駐車支援装置。
【請求項9】
前記駐車枠検知部により検出された駐車枠に対応する所定の確認点を設定し、前記所定の確認点は、前記車両の乗員が前記駐車枠内を確認できるようになる地点であって、前記所定の範囲の始端は、前記所定の確認点に基づいて設定する、請求項1に記載の駐車支援装置。
【請求項10】
前記乗員が前記駐車枠内を確認できるようになる地点は、前記乗員の頭部、または、前記車両に設けられたカメラと、前記駐車枠の長辺の延長線との位置関係に基づいて設定する、請求項8に記載の駐車支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、駐車支援装置、駐車支援方法、および駐車支援プログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、車両周辺に書かれた駐車枠を検知して画像上に表示し、ドライバが駐車枠や駐車方向を選択すると、車両を駐車枠に自動駐車させる駐車支援装置が知られている。例えば、特許文献1には、複数の駐車可能位置が検出されたとき、駐車可能位置を表示装置に表示し、表示した駐車可能位置から目標駐車位置を選択する構成が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-94927号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、走行中、ドライバは前方を注視することが求められるので、従来技術の構成では、画像を見て操作する前に車両を停車させる必要がある。その一方、スムーズな自動駐車が求められる事がある。例えば、駐車待ちの車列が前進駐車で次々と駐車している場面では、通路上に停車させて駐車支援装置を操作するのは迷惑であり、後続車からクラクションを鳴らされることもある。
【0005】
本開示の目的は、停車を必要とせず、スムーズに自動駐車を行うことが可能な駐車支援装置、駐車支援方法、および駐車支援プログラムを提供することである。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本開示に係る駐車支援装置の一態様は、駐車枠を検知する駐車枠検知部と、車両の乗員の駐車指示操作を受け付ける操作受付部と、前記駐車指示操作に符合する駐車枠に前記車両の自動駐車を行う走行制御部と、を備え、前記駐車枠が前記車両の進行方向の左右いずれか一方向にだけあるか、または、前記駐車指示操作が方向の指示を含む駐車指示操作であり、前記駐車指示操作が指示する方向に前記駐車枠があるか、のいずれかの場合であって、かつ、前記駐車枠が前記車両の進行方向の所定の範囲にある場合に、前記駐車枠が前記駐車指示操作に符合すると判定する。
【0007】
また、本開示に係る駐車支援方法の一態様は、駐車枠を検知するステップと、車両の乗員の駐車指示操作を受け付けるステップと、前記駐車枠が前記車両の進行方向の左右いずれか一方向にだけあるか、または、前記駐車指示操作が方向の指示を含む駐車指示操作であり、前記駐車指示操作が指示する方向に前記駐車枠があるか、のいずれかの場合であって、かつ、前記駐車枠が前記車両の進行方向の所定の範囲にある場合に、前記駐車枠が前記駐車指示操作に符合すると判定するステップと、前記駐車指示操作に符合する駐車枠に前記車両の自動駐車を行うステップと、を含む。
【0008】
また、本開示に係る駐車支援プログラムの一態様は、駐車枠を検知するステップと、前記車両の乗員の駐車指示操作を受け付けるステップと、前記駐車枠が前記車両の進行方向の左右いずれか一方向にだけあるか、または、前記駐車指示操作が方向の指示を含む駐車指示操作であり、前記駐車指示操作が指示する方向に前記駐車枠があるか、のいずれかの場合であって、かつ、前記駐車枠が前記車両の進行方向の所定の範囲にある場合に、前記駐車枠が前記駐車指示操作に符合すると判定するステップと、前記駐車指示操作に符合する駐車枠に前記車両の自動駐車を行うステップと、をコンピュータに実行させる。
【発明の効果】
【0009】
本開示によれば、停車を必要とせず、スムーズに自動駐車を行うことができる。
【図面の簡単な説明】
【0010】
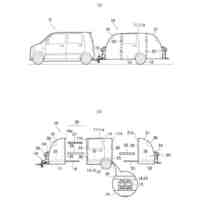
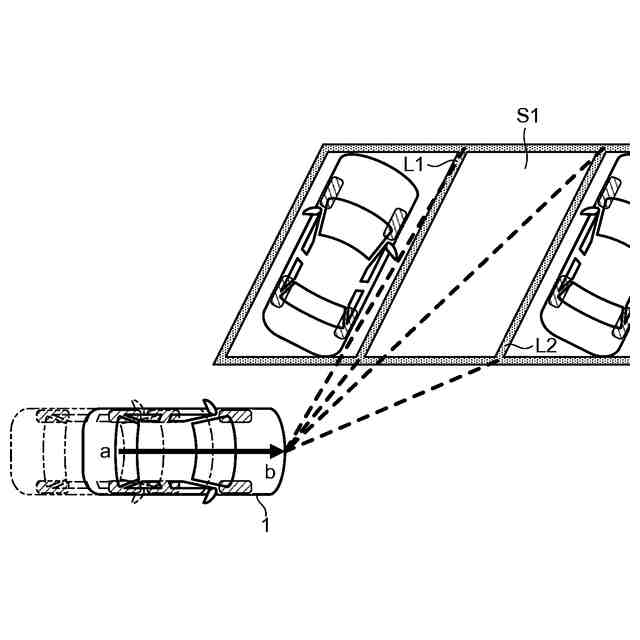
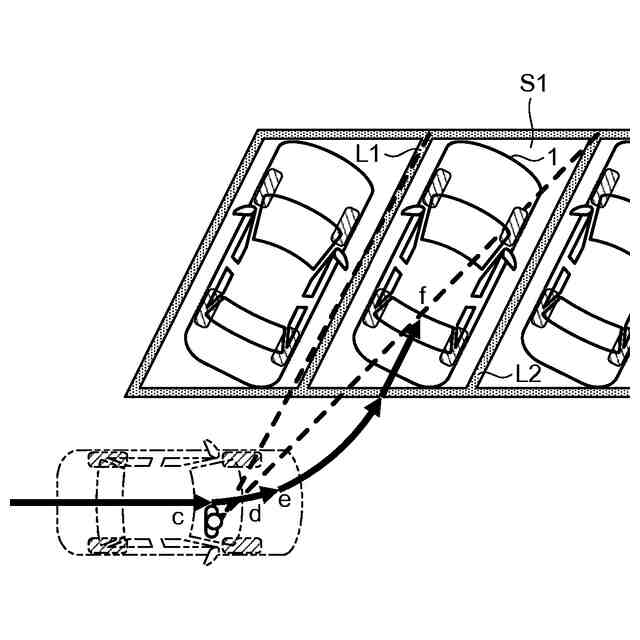
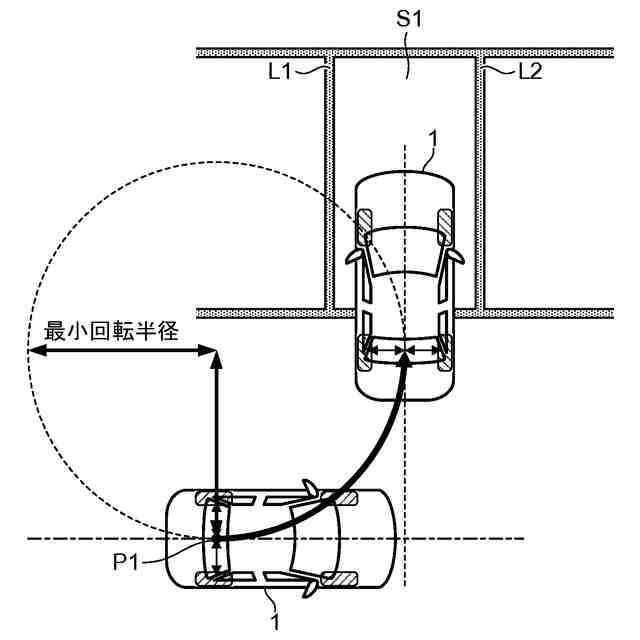
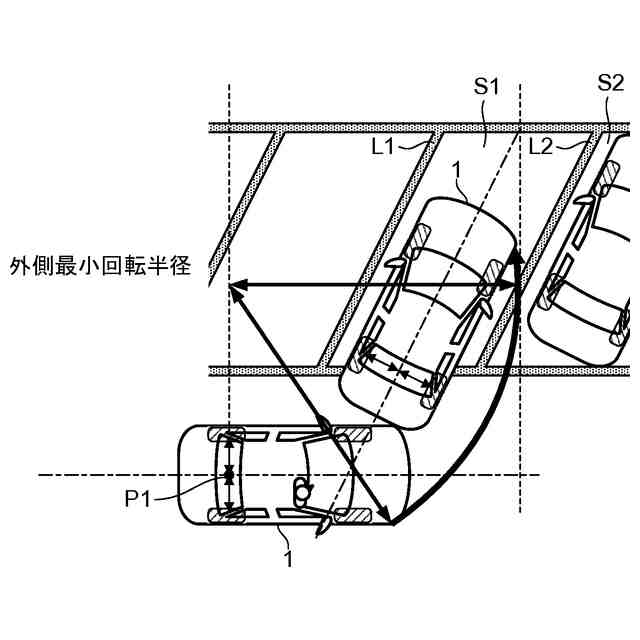
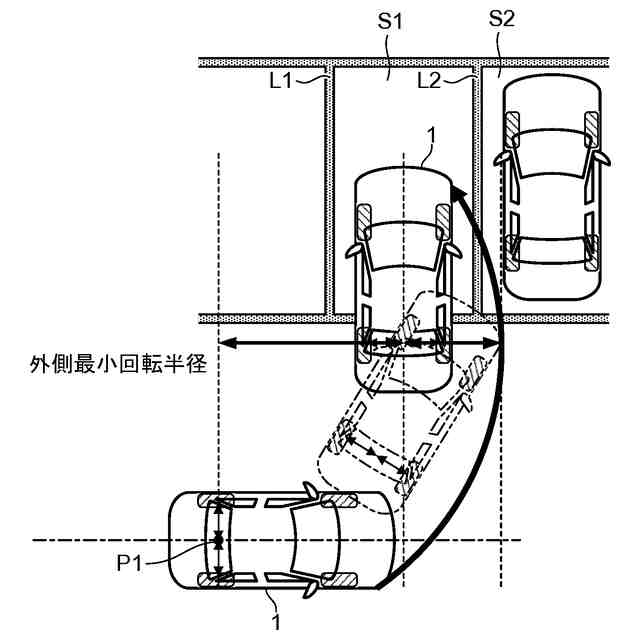
図1Aは、本実施の形態におけるフロントクイック駐車を示す図である。
図1Bは、本実施の形態におけるフロントクイック駐車を示す図である。
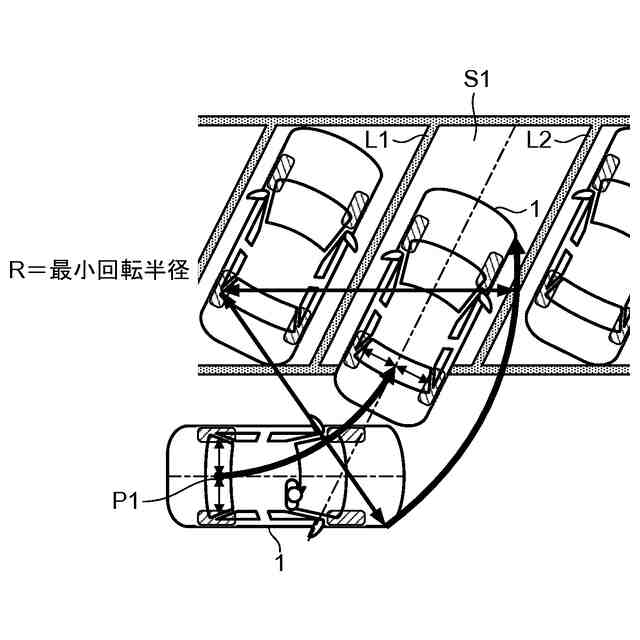
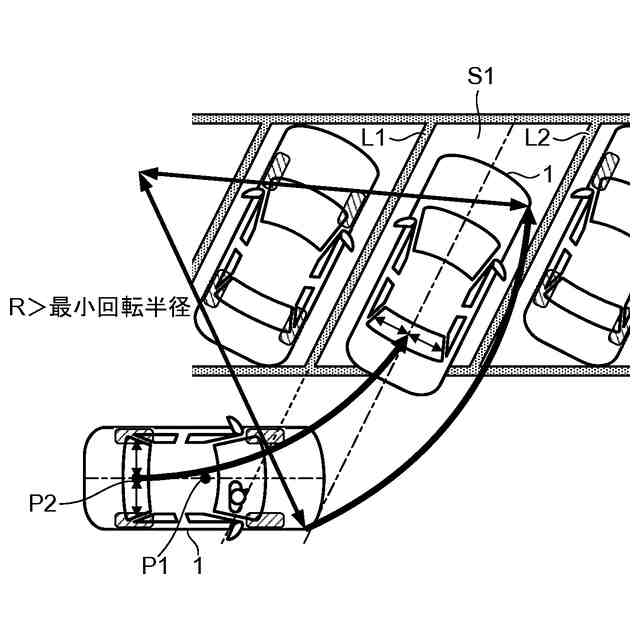
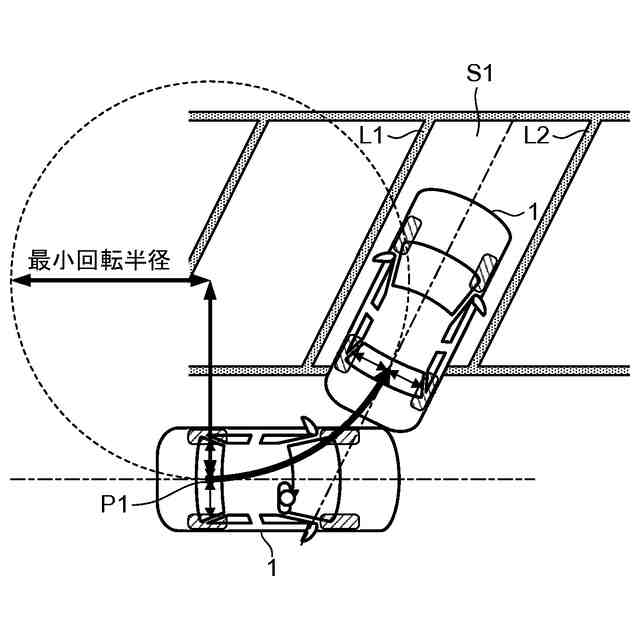
図2Aは、本実施の形態における転舵限界点を示す図である。
図2Bは、本実施の形態における転舵限界点を示す図である。
図2Cは、本実施の形態における転舵限界点を示す図である。
図3Aは、本実施の形態における転舵限界点の数学的な説明を示す図である。
図3Bは、本実施の形態における転舵限界点の数学的な説明を示す図である。
図4Aは、本実施の形態における転舵限界点の数学的な他の説明を示す図である。
図4Bは、本実施の形態における転舵限界点の数学的な他の説明を示す図である。
図5Aは、車両制御上のポイントとなる地点を示す図である。
図5Bは、車両制御上のポイントとなる地点を示す図である。
図5Cは、車両制御上のポイントとなる地点を示す図である。
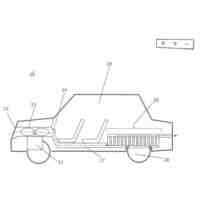
図6は、駐車支援装置を適用可能な車両を示す図である。
図7は、駐車支援装置が適用されるシステムのネットワーク上の構成を示す図である。
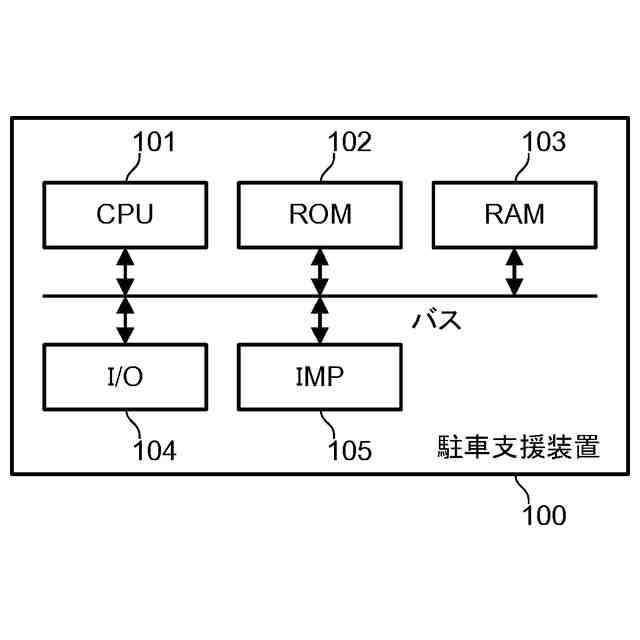
図8は、駐車支援装置の機能を実装したハードウェアを示すブロック図である。
図9は、駐車支援装置を示すブロック図である。
図10は、駐車枠検知領域の設定例を示す図である。
図11は、駐車経路を示す図である。
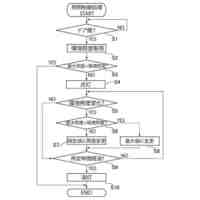
図12は、本実施の形態における自動駐車の制御フローを示す図である。
図13は、本実施の形態における自動駐車の制御フローを示す図である。
図14は、本実施の形態における自動駐車の制御フローを示す図である。
図15は、本実施の形態における自動駐車の制御フローを示す図である。
図16は、駐車枠検出前の状態を示す図である。
図17Aは、確認点を示す図である。
図17Bは、確認点を示す図である。
図18は、次の駐車枠を検知しておく工夫を示す図である。
図19は、空き駐車枠が連続する時のメッセージ出力について説明する図である。
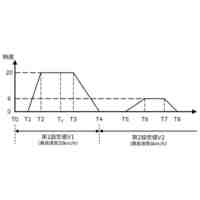
図20は、駐車枠を検出した時に減速を開始することを説明する図である。
図21は、転舵限界点を越えないよう減速する工夫を示す図である。
図22は、転舵限界点を越えないよう減速する工夫を示す別の図である。
図23は、ハンドル操作で駐車指示する場合の対応を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両
3か月前
個人
飛行自動車
2日前
個人
眼科手術車
1か月前
個人
授乳用車両
1か月前
個人
自動車運転補助装置
3か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
19日前
日本精機株式会社
表示装置
1か月前
井関農機株式会社
作業車両
2か月前
個人
キャンピングトレーラー
2か月前
個人
台車用車輪止め具
1か月前
個人
自動車外部装着用しめ飾り
3か月前
日本精機株式会社
車載表示装置
2か月前
日本精機株式会社
車載表示装置
1か月前
個人
謝意シグナル装着車
1か月前
株式会社青木製作所
タンクローリ
1か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用照明装置
6日前
日本精機株式会社
車両用表示装置
3か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
2か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
1か月前
マツダ株式会社
車両
26日前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
3か月前
東レ株式会社
車両用部材の補強方法
2か月前
株式会社小糸製作所
投影装置
1か月前
ダイハツ工業株式会社
バッグ
3か月前
豊田合成株式会社
乗員保護装置
14日前
株式会社SUBARU
保護構造
20日前
バルミューダ株式会社
電動車両
6日前
ダイハツ工業株式会社
車両構造
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ