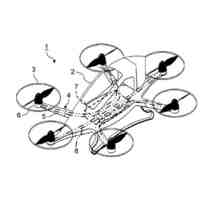
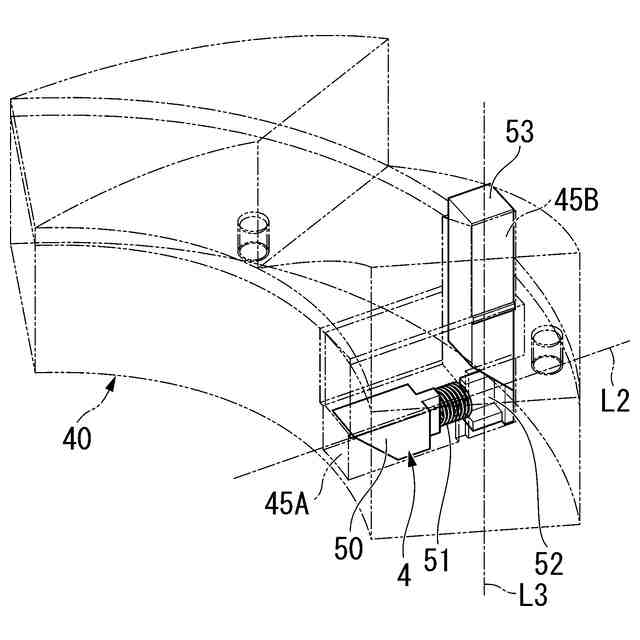
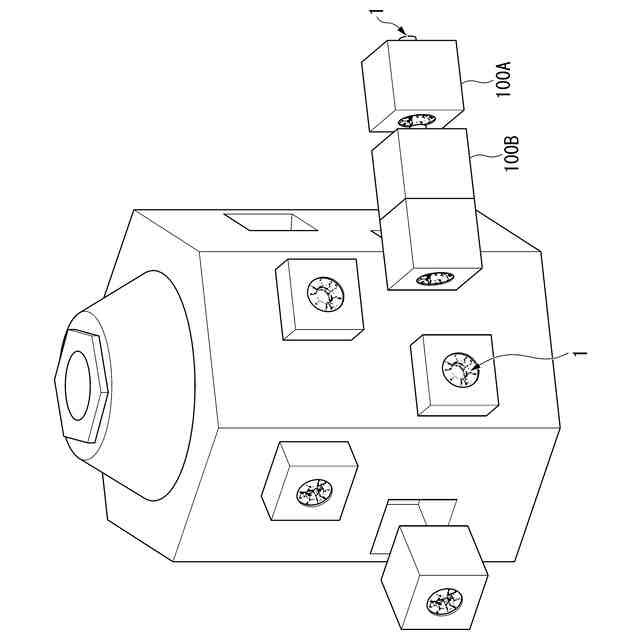
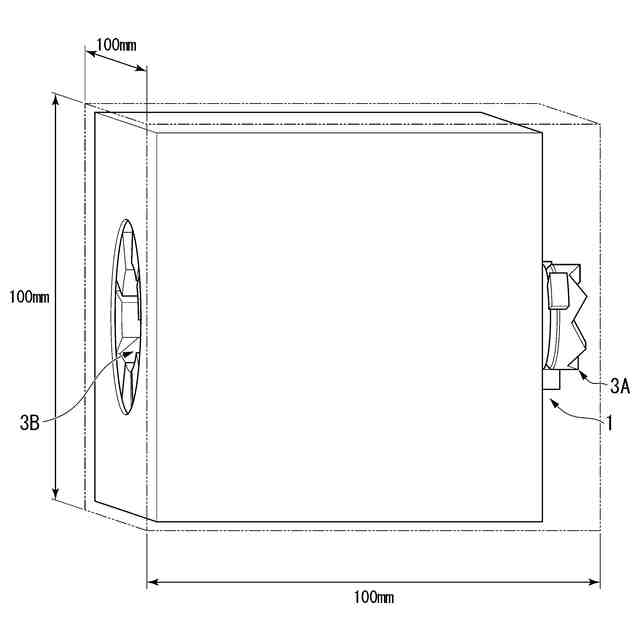
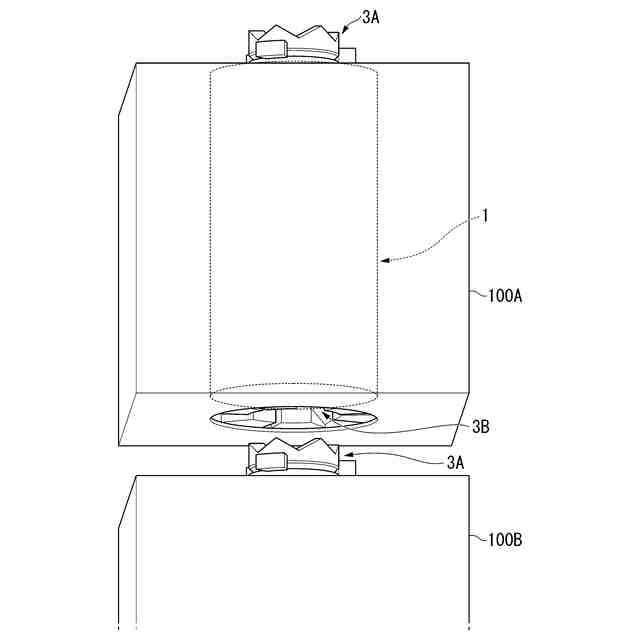
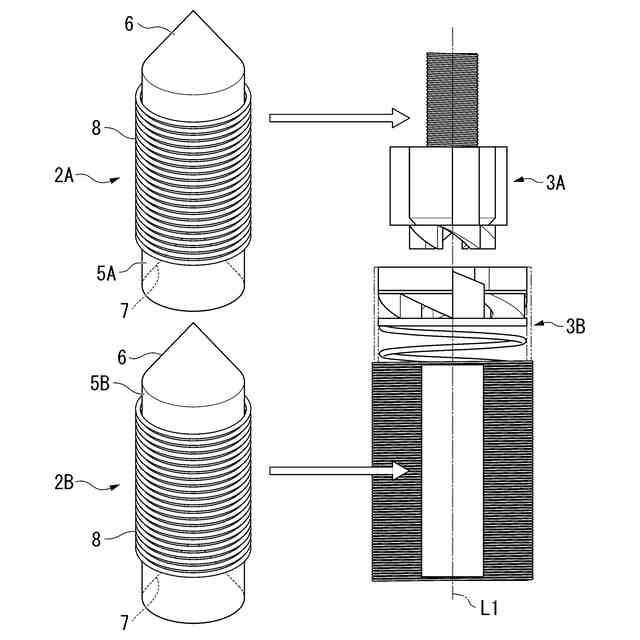
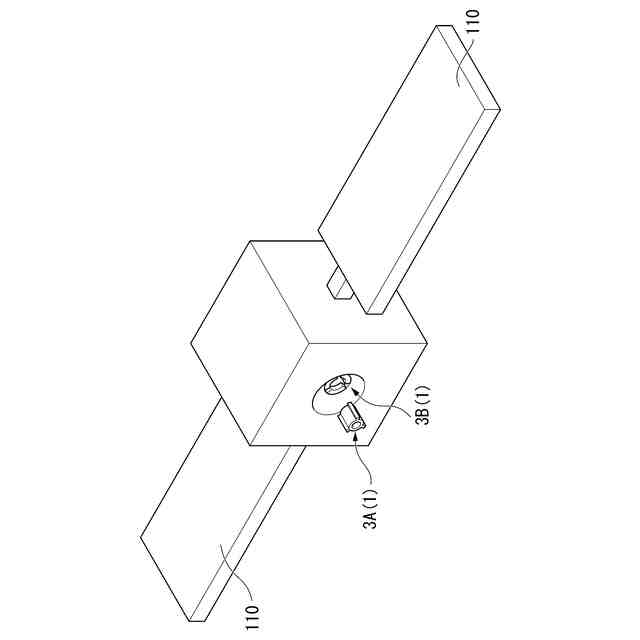
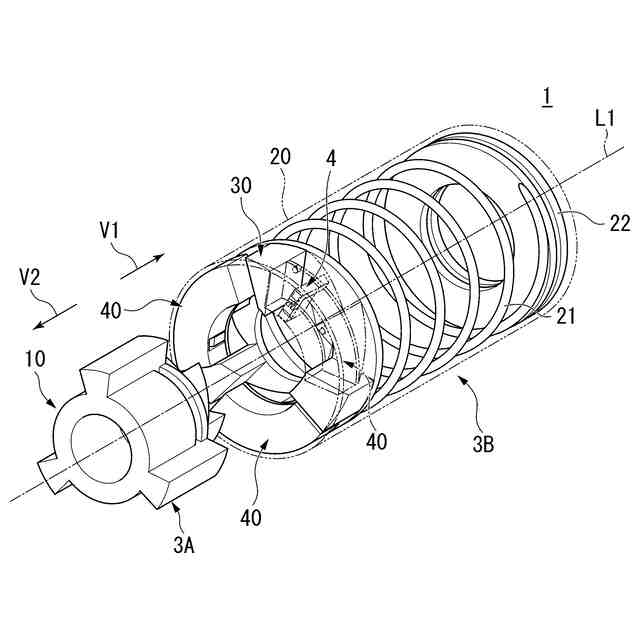
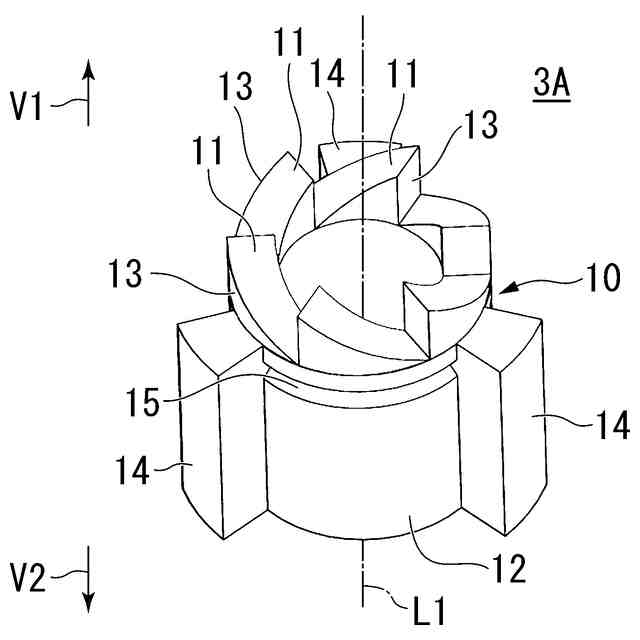
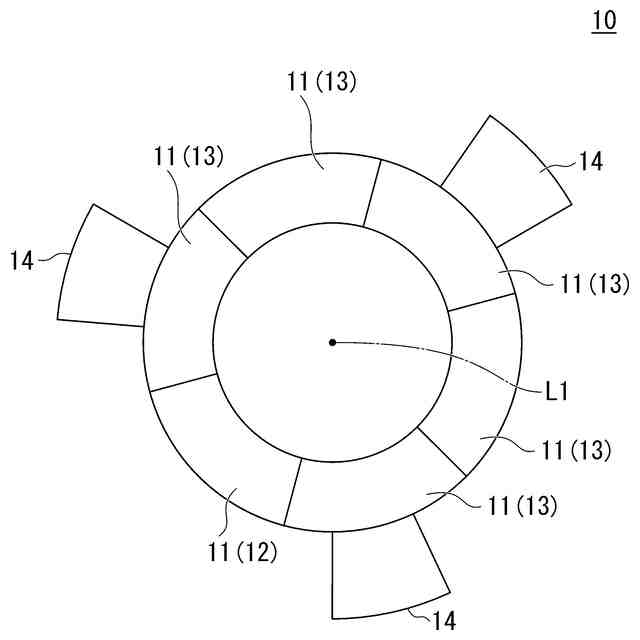
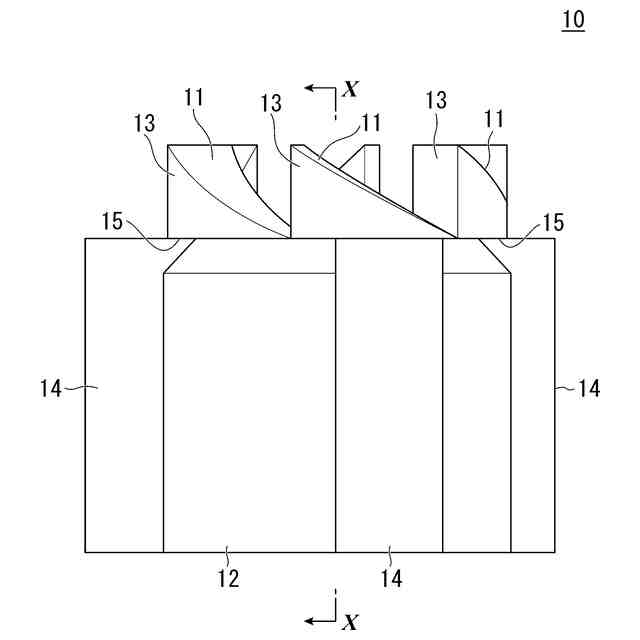
発明の詳細な説明【技術分野】 【0001】 本発明は、結合保持解放機構に関する。 続きを表示(約 4,000 文字)【背景技術】 【0002】 衛星同士の結合は、国際宇宙ステーション(ISS: International Space Station)とスペースシャトルとの結合に始まり、大型衛星に搭載されるものが知られている。例えば、衛星同士を結合する手法としては、複雑な制御則を用いた高精度で正確な6自由度制御を、スラスタを用いて実施し、既に軌道上にある人工衛星(ターゲット衛星)を認識する手法や、ボールねじ機構で引き込んで捕獲する等の手法がある。例えば、特許文献1には、宇宙機に設けられる人工衛星結合機構が開示されている。 超小型を含む小型衛星では、軽量化及び計算リソースの削減のために、複雑な制御を回避して自律的に結合前の直線上に並ぶ位置・姿勢にたどり着く必要がある。例えば、カップ形状の筐体に、先端がコーン形状をなすプローブを直線上で引き込んで強制的にプローブの姿勢を強制する機構が搭載される。例えば、特許文献2には、宇宙船ドックに関する自律衛星ドッキングシステムが開示されている。 例えば、特許文献3には、磁場を使用して衛星をドッキングする機構が開示されている。ホストビークル上にある機構のドッキングコンポーネントは、衛星上にある機構のドッキングコンポーネントとの結合磁場を誘導するための磁石を備える。 さらに小さな超小型衛星では、電磁石を用い、かつ、カップアンドコーン型の結合機構を有するものが知られている。例えは、非特許文献1には、モジュール式宇宙システムの自律的な組み立てと再構成のための概念と技術開発が開示されている。 【先行技術文献】 【特許文献】 【0003】 特開2004-330943号公報 米国特許出願公開第2003/0192995号明細書 米国特許第7815149号明細書 【非特許文献】 【0004】 Concepts and Technology Development for the Autonomous Assembly and Reconfiguration of Modular Space Systems by Lennon Patrick RodgersB.S. Mechanical Engineering University of Illinois at Urbana-Champaign, 2003Submitted to the Department of Mechanical Engineering in partial fulfillment of the requirements for the degree of Master of Science in Mechanical Engineeringat the Massachusetts Institute of Technology February 2006 【発明の概要】 【発明が解決しようとする課題】 【0005】 しかし、特許文献1の技術は、大型衛星の結合保持にモータを利用するため、重量面での課題がある。特許文献2、特許文献3及び非特許文献1の技術は、小型衛星とはいえ、依然としてモータを用いて保持するために重量面での課題が残る。そのため、モータを不要とし、軽量化を図る上で改善の余地がある。 【0006】 そこで本発明は、モータを不要とし、軽量化を図ることができる結合保持解放機構を提供することを目的とする。 【課題を解決するための手段】 【0007】 本発明の一態様に係る結合保持解放機構は、第1部材と、前記第1部材とは別体の第2部材と、前記第1部材と前記第2部材とを保持する保持機構と、前記保持機構を内蔵し、互いに連通する第1孔及び第2孔が形成されたガイド部材と、前記第2部材に弾性力を作用させる第1弾性体と、を備え、前記保持機構は、前記第1孔に配置され、前記第1孔に沿って移動可能な係合部材と、前記係合部材に弾性力を作用させる第2弾性体と、前記第2弾性体を支持する支持部材と、前記第2孔に配置され、前記第2孔に沿って移動可能な押圧部材と、を備え、前記第1部材には、前記係合部材の先端部が嵌まることが可能に開口する溝が形成され、前記第1部材と前記第2部材とは、外部から作用する力により互いに結合及び解放が可能に構成される。 【発明の効果】 【0008】 上記態様によれば、モータを不要とし、軽量化を図ることができる。 【図面の簡単な説明】 【0009】 第1実施形態に係る小型人工衛星の斜視図。 図1の一部と共に、一辺の長さが100mmの立方体の空間を示す斜視図。 図1の一部に搭載される結合保持解放機構を示す斜視図。 第1実施形態に係る第1電磁石を備える第1構造体及び第2電磁石を備える第2構造体の説明図。 第1実施形態に係る第1構造体及び第2構造体を衛星へ搭載する一例を示す斜視図。 第1実施形態に係る結合保持解放機構の斜視図。 第1実施形態に係る第1構造体の斜視図。 第1実施形態に係る第1部材の平面図。 第1実施形態に係る第1部材の側面図。 図9のX-X断面図。 第1実施形態に係るシリンダの斜視図。 第1実施形態に係る第1弾性体の斜視図。 第1実施形態に係るベアリングの斜視図。 第1実施形態に係る第2部材の斜視図。 第1実施形態に係る第2部材の平面図。 第1実施形態に係る第2部材の側面図。 第1実施形態に係るガイド部材の斜視図。 第1実施形態に係るガイド部材の一方の部分の平面図。 第1実施形態に係るガイド部材の一方の部分の側面図。 第1実施形態に係るガイド部材の他方の部分の平面図。 第1実施形態に係るガイド部材の他方の部分の側面図。 第1実施形態に係る第2部材が押圧部材を押し込む様子を示す斜視図。 第1実施形態に係るガイド部材に内蔵された保持機構を示す斜視図であって係合部材の格納状態を示す図。 第1実施形態に係るガイド部材に内蔵された保持機構を示す斜視図であって係合部材の突出状態を示す図。 第1実施形態に係る係合部材の斜視図。 第1実施形態に係る支持部材の斜視図。 第1実施形態に係る押圧部材の斜視図。 第1実施形態に係る係合部材の動作説明図。 第1実施形態に係る係合部材と支持部材との係り合いを示す模式図。 第1実施形態に係る保持機構の動作説明図。 第1実施形態に係る結合保持解放機構の結合開始前の一例を示す斜視図。 第1実施形態に係る結合保持解放機構の結合開始の一例を示す斜視図。 第1実施形態に係る結合フェーズにおいて第1部材が第2部材を押し込む一例を示す斜視図。 第1実施形態に係る結合フェーズにおいて第2部材が第1部材の押し込みによって回転する一例を示す斜視図。 第1実施形態に係る結合保持解放機構の結合完了の一例を示す斜視図。 第1実施形態に係る解放フェーズにおいて第1部材が第2部材を押し込む一例を示す斜視図。 第1実施形態に係る解放フェーズにおいて第2部材が第1部材の押し込みによって回転する一例を示す斜視図。 第1実施形態に係る結合保持解放機構の解放完了の一例を示す斜視図。 第1実施形態に係る結合保持解放機構の一部を拡大した側面図であって結合フェーズの動作説明図。 図39に続く、結合フェーズの動作説明図。 図40に続く、結合フェーズの動作説明図。 図41に続く、結合フェーズの動作説明図。 図42に続く、結合フェーズの動作説明図。 図43に続く、結合完了(保持状態)の説明図。 第1実施形態に係る結合保持解放機構の一部を拡大した側面図であって解放フェーズの動作説明図。 図45に続く、解放フェーズの動作説明図。 図46に続く、解放フェーズの動作説明図。 図47に続く、解放フェーズの動作説明図。 図48に続く、解放フェーズの動作説明図。 図49に続く、解放完了の説明図。 第2実施形態に係るガイド部材に内蔵された保持機構を示す斜視図であって係合部材の格納状態を示す図。 第2実施形態に係るガイド部材に内蔵された保持機構を示す斜視図であって押圧部材が押し込まれた状態を示す図。 第2実施形態に係るガイド部材に内蔵された保持機構を示す斜視図であって係合部材の突出状態を示す図。 第2実施形態に係るガイド部材に内蔵された保持機構を示す平面図であって係合部材の突出状態を示す図。 第2実施形態に係る係合部材の動作説明図。 第3実施形態に係る第2部材の斜視図。 第3実施形態に係るガイド部材の斜視図。 第3実施形態に係る第2部材及びガイド部材の側面図。 【発明を実施するための形態】 【0010】 以下、本発明の実施形態について図面を参照して説明する。実施形態においては、結合保持解放機構の一例として、互いに離れた2つの衛星(互いに離れた2物体の一例)の結合・保持・解放を可能にする機構の例を挙げて説明する。 (【0011】以降は省略されています) この特許をJ-PlatPatで参照する
 特許ウォッチ
特許ウォッチ