TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025014634
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023117346
出願日
2023-07-19
発明の名称
ロボット制御装置及び対象物の設置判定方法
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H01L
21/68 20060101AFI20250123BHJP(基本的電気素子)
要約
【課題】対象物が適切に目標位置に設置されているかについて判定可能なロボット制御装置及び対象物の設置判定方法を提供することである。
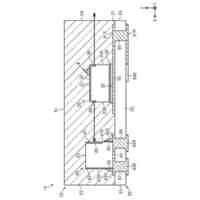
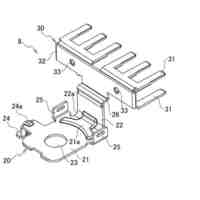
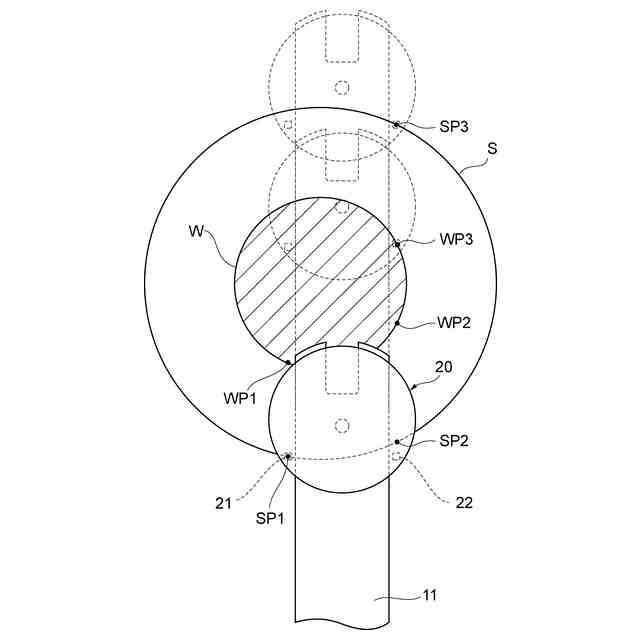
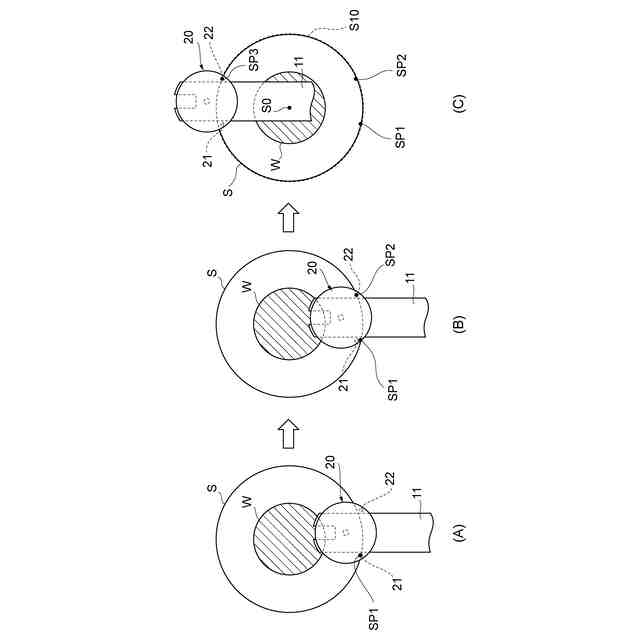
【解決手段】ロボット制御装置100は、ロボット制御手段110によってロボット10を動作させることにより、対象物の円弧形状の一部、及び当該対象物が設置されている設置部の一部のそれぞれについて、ロボット10に保持されているセンサにより複数回検知する検知手段120と、検知された対象物の複数の位置(WP1~WP3)に基づいて、当該対象物の中心点である第1中心位置(W0)を算出する第1中心位置算出手段130と、検知された設置部の複数の位置(SP1~SP3)に基づいて、当該設置部の中心点である第2中心位置(S0)を算出する第2中心位置算出手段140と、第1中心位置(W0)と第2中心位置(S0)とに基づいて、対象物と設置部とのズレを判定するズレ判定手段150と、を備える。
【選択図】図7
特許請求の範囲
【請求項1】
ロボットの動作を制御するロボット制御装置であって、
前記ロボットを動作させるロボット制御手段と、
前記ロボット制御手段によって前記ロボットを動作させることにより、円弧形状を少なくとも一部に構成する対象物のうち当該円弧形状の一部、及び当該対象物が設置されている円弧形状を少なくとも一部に構成する設置部のうち当該円弧形状の一部のそれぞれについて、前記ロボットに保持されているセンサにより複数回検知する検知手段と、
前記検知手段によって検知された前記対象物の円弧形状における複数の位置に基づいて、当該対象物の中心点である第1中心位置を算出する第1中心位置算出手段と、
前記検知手段によって検知された前記設置部の円弧形状における複数の位置に基づいて、当該設置部の中心点である第2中心位置を算出する第2中心位置算出手段と、
前記第1中心位置と前記第2中心位置とに基づいて、前記対象物と前記設置部とのズレを判定するズレ判定手段と、を備える、
ロボット制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記第1中心位置算出手段は、前記検知手段によって検知された前記対象物の円弧形状における少なくとも3つの位置に基づいて、前記第1中心位置を算出する、
請求項1に記載のロボット制御装置。
【請求項3】
前記第2中心位置算出手段は、前記検知手段によって検知された前記設置部の円弧形状における少なくとも3つの位置に基づいて、前記第2中心位置を算出する、
請求項1に記載のロボット制御装置。
【請求項4】
前記第2中心位置算出手段は、前記検知手段によって検知された前記設置部の円弧形状における少なくとも2つの位置、及び前記設置部の円弧形状を一部に含むように構成される円の直径に基づいて、前記第2中心位置を算出する、
請求項1に記載のロボット制御装置。
【請求項5】
前記検知手段は、前記ロボット制御手段によって前記センサが一方向に移動するように前記ロボットが動作することにより、前記対象物のうち当該対象物の円弧形状の一部、及び前記設置部のうち当該設置部の円弧形状の一部のそれぞれについて、前記ロボットに保持されているセンサにより複数回検知する、
請求項1に記載のロボット制御装置。
【請求項6】
ロボットの動作を制御するロボット制御装置が実行する対象物の設置判定方法であって、
前記ロボットを動作させるロボット制御ステップと、
前記ロボット制御ステップにおいて前記ロボットを動作させることにより、円弧形状を少なくとも一部に構成する対象物のうち当該円弧形状の一部、及び当該対象物が設置されている円弧形状を少なくとも一部に構成する設置部のうち当該円弧形状の一部のそれぞれについて、前記ロボットに保持されているセンサにより複数回検知する検知ステップと、
前記検知ステップで検知された前記対象物の円弧形状における複数の位置に基づいて、当該対象物の中心点である第1中心位置を算出する第1中心位置算出ステップと、
前記検知ステップで検知された前記設置部の円弧形状における複数の位置に基づいて、当該設置部の中心点である第2中心位置を算出する第2中心位置算出ステップと、
前記第1中心位置と前記第2中心位置とに基づいて、前記対象物と前記設置部とのズレを判定するズレ判定ステップと、を含む、
対象物の設置判定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御装置及び対象物の設置判定方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年、産業界において、多くのロボットが普及している。当該ロボットは、例えば、電子部品及び機械部品の組み立て、溶接及び搬送等に用いられ、工場の生産ラインの効率化及び自動化が図られている。
【0003】
半導体製造装置に用いられるウエハを搬送する搬送ロボットでは、ウエハを適切な位置へ搬送するためのティーチングを行うが、その精度は、操作者の知識及び熟練度などに依存し、また、操作者の作業スペースが十分に確保できない程の省スペース化が求められている場合もあるため、ティーチングの自動化が図られている。
【0004】
例えば、特許文献1では、3つの光学センサが設けられた基板型治具がハンドにより保持された状態で、基板保持部を回転させることにより当該基板保持部上に予め設けられている目印の円周状の回転軌跡を形成する。そして、3つの光学センサからそれぞれ得られた回転軌跡に対する相対位置に基づいて、ハンドの基板保持部に対する平面視における相対位置を算出する技術が開示されている。
【0005】
このように、3つの光学センサを用いながら、ロボットと目標位置との位置関係、及び障害物などの周辺環境を把握して、対象物を適切に目標位置まで搬送する技術が知られている。
【先行技術文献】
【特許文献】
【0006】
特開2022-148237号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、ロボットによって対象物が目標位置まで搬送された際に、実際に当該対象物が適切に目標位置に設置されたかについては、確認していない。
【0008】
例えば、ステージに対象物が搬送された場合、目標位置である当該ステージの中心位置に対象物の中心位置が一致するように適切に設置されたかどうかについて、ミリ単位以下の精度を作業者の目視によって適切に確認することは難しい。また、作業スペースが十分に確保できない程の省スペース、及びプロセスチャンバなどの暗所であれば、そもそも作業者が確認することができないという問題もある。
【0009】
そこで、本発明は、対象物が適切に目標位置に設置されているかについて判定可能なロボット制御装置及び対象物の設置判定方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の一態様に係るロボット制御装置は、ロボットの動作を制御するロボット制御装置であって、ロボットを動作させるロボット制御手段と、ロボット制御手段によってロボットを動作させることにより、円弧形状を少なくとも一部に構成する対象物のうち当該円弧形状の一部、及び当該対象物が設置されている円弧形状を少なくとも一部に構成する設置部のうち当該円弧形状の一部のそれぞれについて、ロボットに保持されているセンサにより複数回検知する検知手段と、検知手段によって検知された対象物の円弧形状における複数の位置に基づいて、当該対象物の中心点である第1中心位置を算出する第1中心位置算出手段と、検知手段によって検知された設置部の円弧形状における複数の位置に基づいて、当該設置部の中心点である第2中心位置を算出する第2中心位置算出手段と、第1中心位置と第2中心位置とに基づいて、対象物と設置部とのズレを判定するズレ判定手段と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
1日前
株式会社ダイヘン
電力変換装置、および、電力システム
4日前
国立大学法人九州工業大学
搬送ロボットの制御方法
5日前
イリソ電子工業株式会社
電子部品
1日前
三洋化成工業株式会社
軟磁性材料
19日前
太陽誘電株式会社
コイル部品
5日前
オムロン株式会社
電磁継電器
5日前
太陽誘電株式会社
コイル部品
5日前
オムロン株式会社
電磁継電器
5日前
オムロン株式会社
電磁継電器
5日前
国立大学法人信州大学
トランス
5日前
株式会社半導体エネルギー研究所
電池
18日前
日新電機株式会社
変圧器
13日前
日本特殊陶業株式会社
保持装置
19日前
株式会社ヨコオ
ソケット
12日前
三洲電線株式会社
撚線導体
19日前
トヨタバッテリー株式会社
二次電池
12日前
三洋化成工業株式会社
リチウムイオン電池
19日前
ローム株式会社
半導体発光装置
4日前
シャープ株式会社
アンテナ装置
12日前
トヨタバッテリー株式会社
電池パック
4日前
株式会社村田製作所
電池パック
19日前
住友電気工業株式会社
耐熱電線
5日前
株式会社村田製作所
コイル部品
11日前
河村電器産業株式会社
接続装置
13日前
河村電器産業株式会社
接続装置
13日前
矢崎総業株式会社
コネクタ
13日前
ホシデン株式会社
コネクタ
19日前
矢崎総業株式会社
コネクタ
13日前
東洋電装株式会社
レバースイッチ
4日前
日産自動車株式会社
表面実装部品
12日前
TDK株式会社
コイル部品
18日前
原田工業株式会社
複合平面アンテナ装置
18日前
矢崎総業株式会社
コネクタ
19日前
矢崎総業株式会社
コネクタ
13日前
矢崎総業株式会社
コネクタ
4日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ