TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025013831
公報種別
公開特許公報(A)
公開日
2025-01-28
出願番号
2024176534,2023112181
出願日
2024-10-08,2019-04-17
発明の名称
磁気浮上を使用する、垂直離着陸のためのシステムおよび方法
出願人
マグレブ エアロ インコーポレイテッド
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B64C
29/00 20060101AFI20250121BHJP(航空機;飛行;宇宙工学)
要約
【課題】磁気浮上を使用する、垂直離着陸のためのシステムおよび方法の提供。
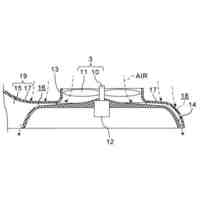
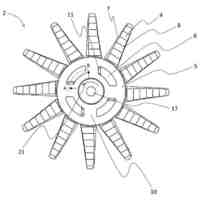
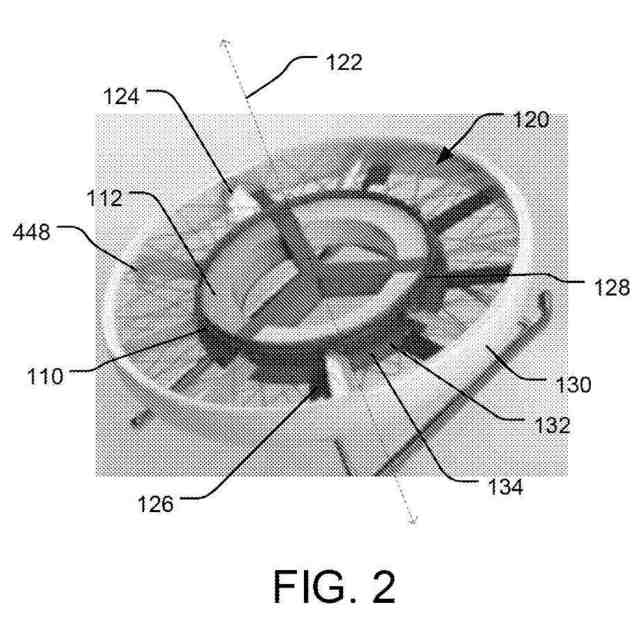
【解決手段】システムおよび方法は、固定子と、固定子によって磁気的に浮上される回転子とを含み得る、垂直離着陸(VTOL)プラットフォームに関する。回転子および固定子は、回転子が回転軸の周りを回転するように、環状であり得る。固定子は、誘導、浮上、および駆動力を提供して回転子を駆動する、ならびにVTOLプラットフォームの揚力、ピッチ、ロール、またはヨーのうちの少なくとも1つを制御するように具体的ピッチ角まで独立して回転され得る、回転子の回転子羽根の動作を制御する、磁石を含むことができる。種々のコントローラが、VTOLプラットフォームのコンポーネントの独立および冗長制御を可能にするために使用されることができる。
【選択図】図1
特許請求の範囲
【請求項1】
本明細書に記載の発明。
発明の詳細な説明
【技術分野】
【0001】
(関連出願の相互参照)
本開示は、その開示が、参照することによってそれらの全体として本明細書に組み込まれる、「SYSTEMS AND METHODS FOR VERTICAL TAKEOFF AND LANDING WITH MAGNETIC PROPULSION」と題され、2018年4月17日に出願された、米国仮出願第62/659,013号、および「MAGNETIC LEVITATION FOR VERTICAL TAKEOFF AND LANDING」と題され、2018年12月4日に出願された、米国仮出願第62/775,253号の利益および優先権を主張する。
続きを表示(約 4,100 文字)
【0002】
本開示は、概して、垂直離着陸に関する。より具体的には、本開示は、垂直離着陸のための磁気浮上に関する。
【背景技術】
【0003】
種々の空中プラットフォームは、プラットフォームが垂直にホバリング、離陸、および着陸し得る、垂直離着陸(VTOL)を実施することができる。VTOLプラットフォームは、固定翼プラットフォームと、回転翼プラットフォームとを含むことができる。VTOLプラットフォームは、無人航空機を含むことができる。VTOLプラットフォームは、分散型電気推進を有することができ、傾転回転子および/または傾転翼構成を有することができる。
【0004】
典型的には、VTOLプラットフォームは、揚力および他の移動力を発生させるように燃焼ベースの発電に依拠する。加えて、VTOLプラットフォームは、比較的に大きい形状因子を有し得る。したがって、既存のVTOLプラットフォームは、都市環境および個人使用モードでそのようなプラットフォームを使用することを困難にする、技術的限界を有し得る。
【発明の概要】
【課題を解決するための手段】
【0005】
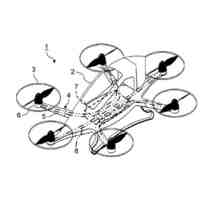
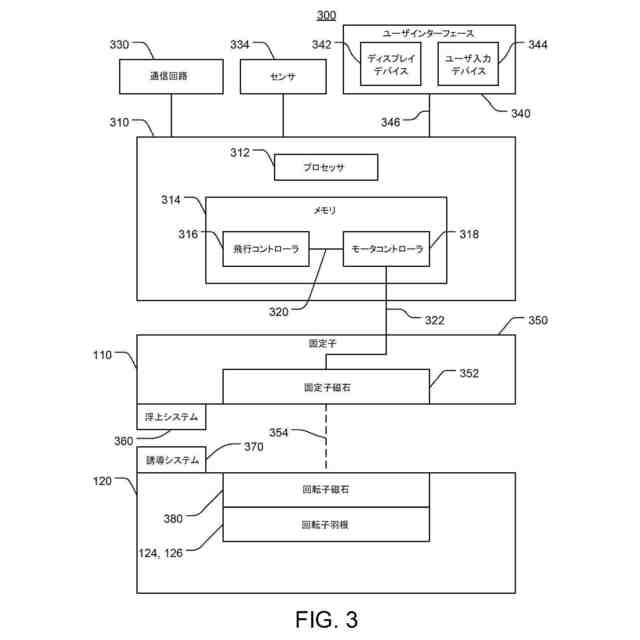
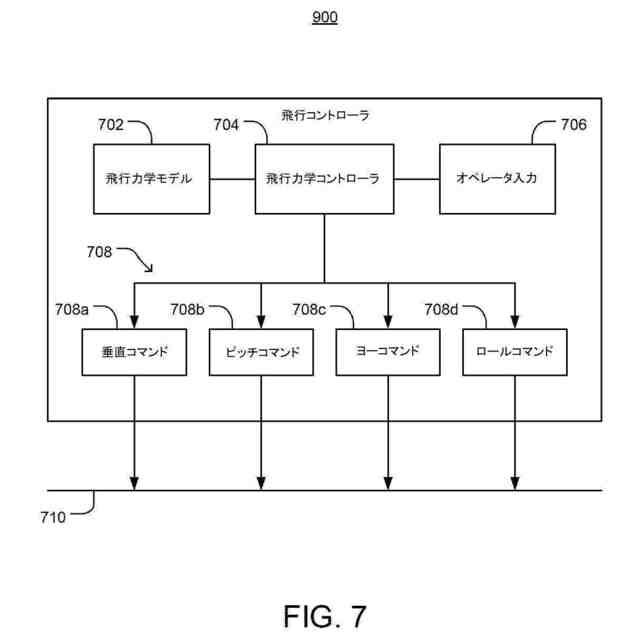
本開示の少なくとも1つの側面は、VTOLプラットフォームに関する。VTOLプラットフォームは、回転子と、固定子と、飛行コントローラと、モータコントローラとを含む。回転子は、回転子軸の周りに配向され、固定子から半径方向に離間される、複数の回転子羽根を含む。各回転子羽根は、回転子アームの回転が、回転子ピッチ軸の周りで回転子羽根を回転させるように、回転子アームに結合される。回転子アームは、第2の回転子磁石から離間される第1の回転子磁石に結合される。固定子は、複数の電磁石を含む。飛行コントローラは、移動命令を受信し、移動命令から所望の移動を抽出し、回転子に、推力、ヨー軸の周りの力のモーメント、プラットフォームピッチ軸の周りの力のモーメント、またはロール軸の周りの力のモーメントのうちの少なくとも1つを発生させるように構成される、1つまたは複数の飛行コマンドを発生させるように構成される。モータコントローラは、1つまたは複数の飛行制御コマンドを受信し、1つまたは複数の飛行制御コマンドに基づいて、電磁石を通して電気信号を駆動するように構成される。複数の電磁石は、電気信号に対応する電磁場を出力し、回転子の回転子磁石を駆動し、回転子軸の周りで回転子を回転させ、羽根の中立ピッチ軸の周りで回転子羽根を回転させ、回転子に、推力、ヨー軸の周りの力のモーメント、プラットフォームピッチ軸の周りの力のモーメント、またはプラットフォームロール軸の周りの力のモーメントのうちの少なくとも1つを発生させるように構成される。
【0006】
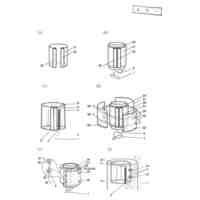
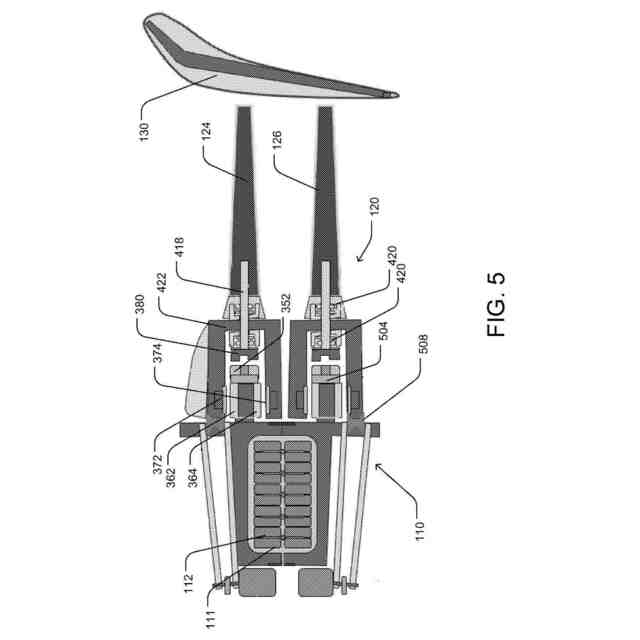
本開示の少なくとも1つの側面は、固定子との動作のための回転子に関する。回転子は、回転軸を画定し、固定子の周囲に配列される複数の回転子区画を備える、環状回転子基部を含む。各回転子区画は、回転軸から離間される側壁と、側壁の第1の端部から回転軸に向かって延在する第1の回転子壁と、側壁の第2の端部から回転軸に向かって延在する第2の回転子壁とを含み、第2の回転子壁は、第1の回転子壁から離間され、回転子は、第1の回転子壁および第2の回転子壁を通して、回転軸と平行に回転子軸を画定する。各回転子区画は、第1の回転子壁と結合される、少なくとも1つの第1の回転子磁石であって、回転子軸に沿って第1の回転子壁と第1の固定子磁石との間に第1の空間を維持するように構成される、少なくとも1つの第1の回転子磁石を含む。各回転子区画は、第2の回転子壁と結合される、少なくとも1つの第2の回転子磁石であって、回転子軸に沿って第2の回転子壁と第2の固定子磁石との間に第2の空間を維持するように構成される、少なくとも1つの第2の回転子磁石を含む。各回転子区画は、側壁と結合され、固定子の1つまたは複数の推進磁石から離間される、少なくとも1つの第3の回転子磁石を含む。回転子は、少なくとも1つの第3の回転子磁石と相互作用する1つまたは複数の推進磁石の磁場を介して、推進磁石によって駆動されるように構成される。
【0007】
少なくとも1つの側面は、回転子との動作のための固定子に関する。固定子は、複数の固定子区画を備える、環状固定子基部であって、中心軸を画定する、固定子基部を含む。各固定子区画は、側壁と、側壁から延在する、支持構造と、支持構造の第1の表面と結合される、少なくとも1つの第1の固定子磁石と、第1の表面と反対の支持構造の第2の表面と結合される、少なくとも1つの第2の固定子磁石と、少なくとも1つの推進磁石とを含む。少なくとも1つの第1の固定子磁石および少なくとも1つの第2の固定子磁石は、中心軸と平行に固定子軸を画定し、少なくとも1つの第1の固定子磁石は、固定子軸に沿って回転子の第1の回転子磁石と少なくとも1つの第1の固定子磁石との間に第1の空間を維持するように構成され、少なくとも1つの第2の固定子磁石は、固定子軸に沿って回転子の第2の回転子磁石と少なくとも1つの第2の固定子磁石との間に第2の空間を維持するように構成される。少なくとも1つの推進磁石は、支持構造と結合され、回転子の1つまたは複数の第3の回転子磁石から離間され、少なくとも1つの推進磁石は、制御信号に応答して磁場を出力し、中心軸の周りで回転子を駆動するように構成される。
【0008】
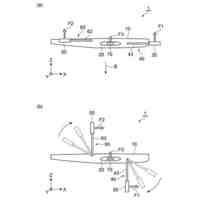
少なくとも1つの側面は、回転子制御システムに関する。回転子制御システムは、回転子と、固定子とを含む。回転子は、1つまたは複数の第1の固定子コイルと整合される、第1の回転子磁気コンポーネントと、1つまたは複数の第2の固定子コイルと整合され、第1の回転子磁気コンポーネントに隣接する、第2の回転子磁気コンポーネントと、第1の回転子磁気コンポーネントおよび第2の回転子磁気コンポーネントを接続する、アームと、アームに固定される、第1の回転子羽根とを含む。アームの第1のアーム端が、第1の回転子磁気コンポーネントと結合され、アームの第2のアーム端が、第2の回転子磁気コンポーネントと結合され、第2の回転子磁気コンポーネントに印加される第2の磁力に対して、第1の回転子磁気コンポーネントに印加される第1の磁力に基づいて変化する、アーム角を画定する。第1の回転子羽根は、羽根ピッチ軸に沿ってアームから延在し、第1の回転子羽根は、羽根ピッチ軸に対して羽根ピッチ角を画定し、羽根ピッチ角は、アーム角に対応する。固定子は、少なくとも1つの制御信号に応答して、少なくとも、第1の回転子磁気コンポーネントを駆動する第1の磁場、および第2の回転子磁気コンポーネントを駆動する第2の磁場を出力するように構成される、複数の電磁石を含み、少なくとも1つの制御信号は、第1の磁場に、第1の回転子磁気コンポーネント上に第1の磁力を印加させ、第2の磁場に、第2の磁気コンポーネント上に第2の磁力を印加させ、羽根ピッチ角を制御する。
【0009】
少なくとも1つの側面は、回転子制御システムに関する。回転子制御システムは、回転子と、固定子とを含む。回転子は、回転軸を画定し、固定子の周囲に配列される複数の回転子区画を備える、環状回転子基部を含む。各回転子区画は、回転軸と垂直な羽根ピッチ軸の周りで回転されるように構成される、第1の回転子羽根と、受電回路と、羽根ピッチ軸の周りで第1の回転子羽根を回転させるために、受電回路を介して受電される電力を使用して回転する、モータと、制御信号に応答して、羽根ピッチ軸の周りで第1の回転子羽根を回転させるために、モータ信号をモータに提供する、モータコントローラと、制御信号を受信し、制御信号をモータコントローラに提供する、第1の無線送受信機とを含む。固定子は、制御コマンドを受信し、制御コマンドに基づいて制御信号を第1の無線送受信機に無線で伝送する、第2の無線送受信機と、受電回路と相互作用し、電力を受電回路に提供する、磁場を出力する、送電回路とを含む。
【0010】
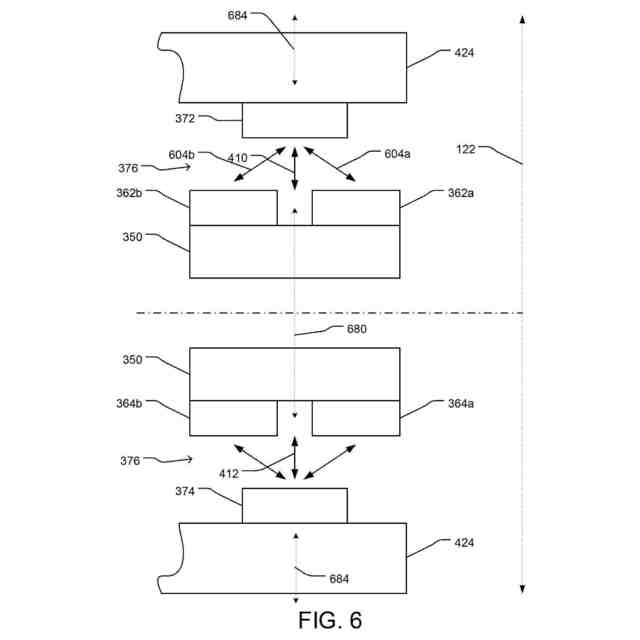
少なくとも1つの側面は、システムに関する。本システムは、回転子と、固定子とを含む。回転子は、側壁と、側壁の第1の端部から延在する第1の回転子壁と、側壁の第2の端部から延在する第2の回転子壁であって、第1の回転子壁から離間される第2の回転子壁と、第1の回転子壁と結合される、少なくとも1つの第1の回転子磁石と、第2の回転子壁と結合される、少なくとも1つの第2の回転子磁石とを含む。固定子は、第1の回転子壁と第2の回転子壁との間に延在する、支持構造と、支持構造の第1の表面と結合され、少なくとも1つの第1の回転子磁石に近接する、少なくとも1つの第1の固定子磁石であって、少なくとも1つの第1の回転子磁石は、少なくとも1つの第1の固定子磁石と少なくとも1つの第1の回転子磁石との間の第1の距離に対応する電流を少なくとも1つの第1の固定子磁石内に誘発する、少なくとも1つの第1の固定子磁石と、第1の表面と反対の支持構造の第2の表面と結合され、少なくとも1つの第2の回転子磁石に近接する、少なくとも1つの第2の固定子磁石であって、少なくとも1つの第2の固定子磁石は、少なくとも1つの第1の固定子磁石と電気的に結合され、第1の固定子磁石から電流を受電し、少なくとも1つの第2の固定子磁石は、第1の固定子磁石からの電流に基づく磁場強度を有する、磁場を出力し、磁場は、少なくとも1つの第2の回転子磁石と相互作用し、少なくとも1つの第2の固定子磁石と少なくとも1つの第2の回転子磁石との間の第2の距離を制御する、少なくとも1つの第2の固定子磁石とを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
10か月前
個人
ドローンシステム
16日前
株式会社三圓
浮上装置
4か月前
個人
空港用貨物搬送車
8か月前
個人
ドローンの計測操作方法3
4か月前
個人
ドローンの計測操作方法2
4か月前
個人
飛行艇
6か月前
個人
垂直離着陸機用エンジン改
3日前
個人
自由落下運航システム
10か月前
キヤノン電子株式会社
磁気トルカ
5か月前
個人
マルチコプター型電気飛行機
10か月前
個人
人工衛星推進材循環エンジン
9か月前
個人
空中移動システム
1か月前
個人
ドローンを自動離着陸する方法
20日前
個人
ドローン消音装置
3か月前
合同会社アドエア
飛行体落下補助装置
12か月前
株式会社中北製作所
羽ばたき装置
8か月前
株式会社SUBARU
電動航空機
8か月前
株式会社セネック
ドローンポート
8か月前
株式会社中北製作所
羽ばたき装置
9か月前
株式会社セネック
ドローンポート
8か月前
合同会社アドエア
飛行体の落下補助装置
1か月前
国立大学法人九州大学
飛行体
11か月前
個人
垂直離着陸機用ガスタービンエンジン
16日前
株式会社SUBARU
移動体
1か月前
全日本空輸株式会社
ドーリシステム
3か月前
株式会社SUBARU
回転翼航空機
8か月前
SkyDeer株式会社
衛星制御方法
11か月前
HDサービス合同会社
カメラ装着装置
3か月前
本田技研工業株式会社
移動体
4か月前
本田技研工業株式会社
航空機
4か月前
株式会社日立製作所
推進装置
2か月前
株式会社SUBARU
構造体の製造方法
5か月前
株式会社SUBARU
構造体の製造方法
5か月前
株式会社小糸製作所
航空機用灯具
5か月前
本田技研工業株式会社
移動体
5か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ