TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025013272
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2024111164
出願日
2024-07-10
発明の名称
液圧駆動システムを制御するための方法
出願人
ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング
,
ROBERT BOSCH GMBH
代理人
アインゼル・フェリックス=ラインハルト
,
個人
,
個人
,
個人
,
個人
主分類
F15B
11/02 20060101AFI20250117BHJP(流体圧アクチュエータ;水力学または空気力学一般)
要約
【課題】複数の液圧負荷を同時に使用する場合に、機械の操作者にとって予測可能な一定の制御挙動を達成する。
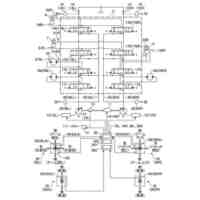
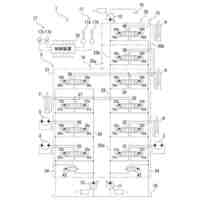
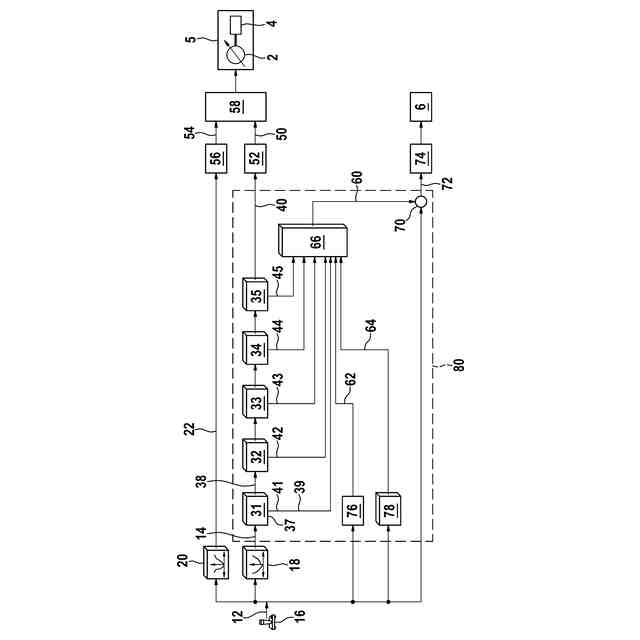
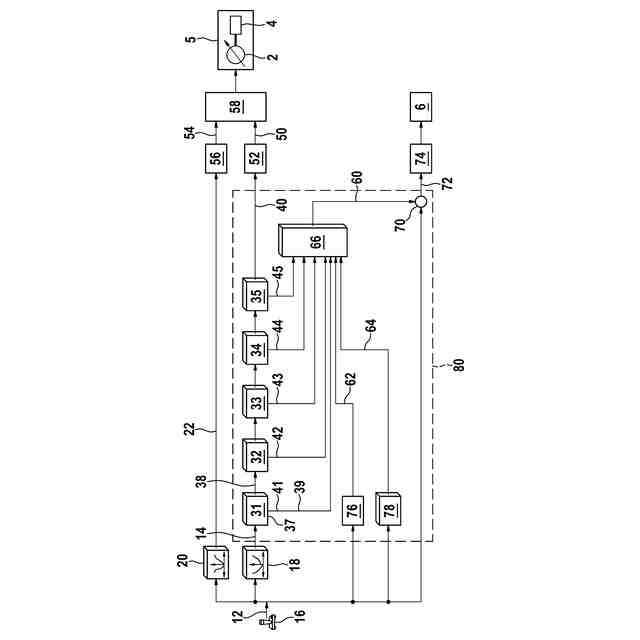
【解決手段】各負荷についてのスケーリング関数(31,32,33,34,35)は、入力側体積流量需要を出力側体積流量需要に写像し、各負荷についてのスケーリング係数(41,42,43,44,45)を、出力側体積流量需要と入力側体積流量需要との間の比率として決定し、1つの段階の出力側体積流量需要は、次の段階の入力側体積流量需要として用いられ、体積流量要求は、第1の段階の入力側体積流量需要として用いられる。
【選択図】図2
特許請求の範囲
【請求項1】
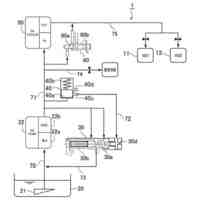
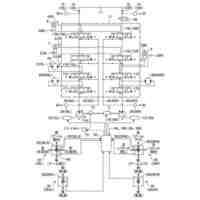
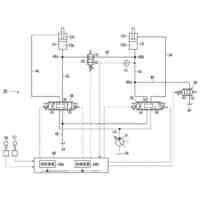
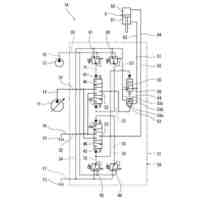
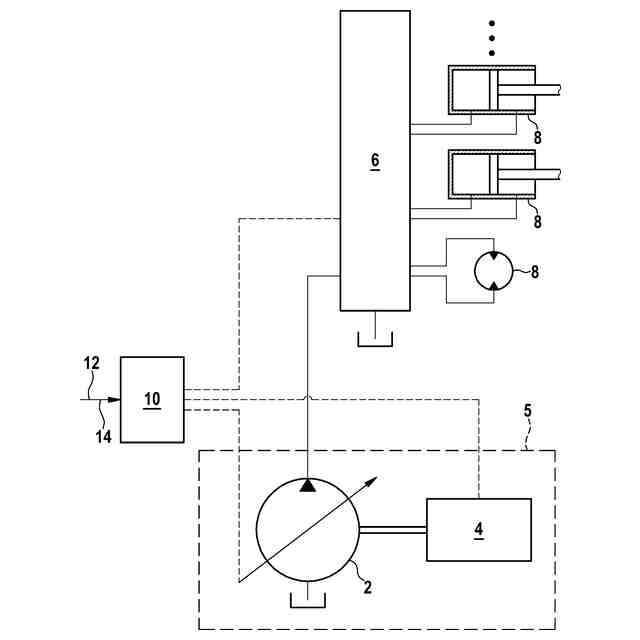
液圧駆動システムを制御するための方法であって、前記液圧駆動システムは、当該液圧駆動システム内の圧力媒体における体積流量を提供する圧力媒体源(5)と、複数の液圧負荷(8)とを備え、前記液圧負荷(8)には、バルブアセンブリ(6)を介して、個別に制御可能な方式により圧力媒体が供給される、方法において、
複数の負荷の各々について体積流量要求(14)を受信又は特定することと、
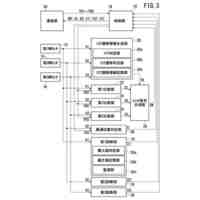
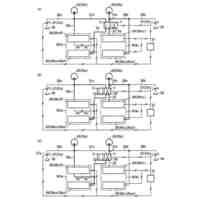
1つ又は複数の順次連続する段階のスケーリング関数(31,32,33,34,35)を使用することであって、各段階について、各負荷についての前記スケーリング関数は、それぞれの負荷の入力側体積流量需要を、それぞれの負荷の出力側体積流量需要に写像し、各負荷についてのスケーリング係数(41,42,43,44,45)を、それぞれの負荷の前記出力側体積流量需要と前記入力側体積流量需要との間の比率として決定し、1つの段階のスケーリング関数の出力側体積流量需要は、それぞれ次の段階のスケーリング関数の入力側体積流量需要として用いられ、前記体積流量要求(14)は、第1の段階の前記スケーリング関数(31)の入力側体積流量需要として用いられる、ことと、
前記それぞれの負荷の前記スケーリング係数(41,42,43,44,45)に基づいて、各負荷についての総スケーリング係数(60)を決定すること(66)と、
前記それぞれの負荷の前記総スケーリング係数に基づいて、各負荷についてのスケーリングされた体積流量要求(72)を決定すること(70)と、
最後の段階の前記スケーリング関数(35)の前記出力側体積流量需要から総体積流量要求(50)を決定すること(52)と、
前記スケーリングされた体積流量要求(72)に応じて、前記バルブアセンブリ(6)を駆動制御すること(74)と、
前記総体積流量要求(50)に応じて、前記圧力媒体源(5)を駆動制御すること(58)と、
を含む方法。
続きを表示(約 1,800 文字)
【請求項2】
前記最後の段階の前記スケーリング関数(35)の前記出力側体積流量需要から前記総体積流量要求を決定すること(52)は、前記最後の段階の前記スケーリング関数(35)の前記出力側体積流量需要の合計を含み又は当該合計である、請求項1に記載の方法。
【請求項3】
前記圧力媒体源(5)は、調整可能な変位量を有する液圧機械(2)を有し、前記圧力媒体源(5)を駆動制御すること(58)は、前記総体積流量要求(50)に応じて前記液圧機械(2)の変位量を制御することを含む、請求項1又は2に記載の方法。
【請求項4】
前記圧力媒体源(5)は、液圧機械(2)と、前記液圧機械(2)を駆動する駆動モータ(4)とを備え、前記圧力媒体源(5)を駆動制御すること(58)は、前記総体積流量要求(50)に応じて、前記駆動モータ(4)の回転数を制御することを含み、前記駆動モータ(4)は、特に電気機械である、請求項1乃至3のいずれか一項に記載の方法。
【請求項5】
前記体積流量要求(14)は、少なくとも1つの操作装置(16)を用いて捕捉される、前記負荷についての操作事前設定(12)から決定される、請求項1乃至4のいずれか一項に記載の方法。
【請求項6】
前記負荷についての前記総スケーリング係数(60)を決定すること(66)は、さらに、アクティブ負荷の数(62)に基づいており、及び/又は、
前記圧力媒体源(5)は、液圧機械(2)と、前記液圧機械(2)を駆動する駆動モータ(4)とを備え、前記負荷についての前記総スケーリング係数(60)を決定すること(66)は、さらに、それぞれの負荷の前記体積流量要求(14)と、前記駆動モータ(4)の実際のモータ回転数又は前記駆動モータ(4)の設定されたモータ回転数とから決定されるモータスケーリング係数(64)に基づいている、請求項1乃至5のいずれか一項に記載の方法。
【請求項7】
前記圧力媒体源(5)を駆動制御すること(58)は、さらに、前記負荷の圧力要求(22)から決定されるポンプ圧力要求(54)に基づいており、前記ポンプ圧力要求(54)は、特に、前記負荷の圧力要求(22)のうちの最大の圧力要求(22)以上のものとして決定される、請求項1乃至6のいずれか一項に記載の方法。
【請求項8】
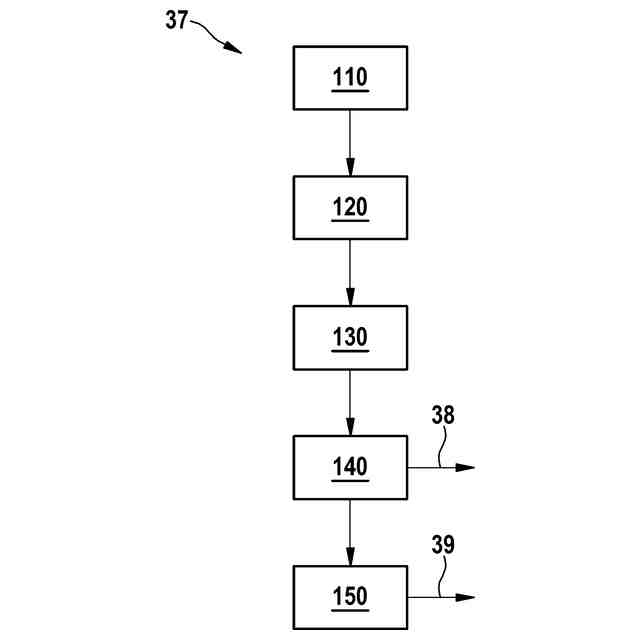
前記スケーリング関数は、要求低減関数(37)を含み、
前記要求低減関数(37)は、各負荷について以下のステップ、すなわち、
第1の負荷とは異なる1つ又は複数の第2の負荷が、前記第1の負荷の要求低減関数の体積流量要求又は入力側体積流量需要をどの程度低減させるかの割合を示す乗数を決定するステップ(110)と、
それぞれの前記第2の負荷の体積流量要求及び/又はそれぞれの前記第2の負荷の要求低減関数の前記入力側体積流量需要に依存する各前記第2の負荷についての低減体積流量を決定するステップ(120)と、
1つ又は複数の前記第2の負荷の前記低減体積流量に基づいて、前記第1の負荷についての体積流量減少を決定するステップ(130)と、
前記第1の負荷についての前記要求低減関数の前記入力側体積流量需要と、前記乗数と前記体積流量減少との積とに基づいて、前記第1の負荷についての前記要求低減関数(37)の前記出力側体積流量需要(38)を決定するステップ(140)と、
を実装し、前記ステップがそれぞれ実装される負荷は、それぞれ第1の負荷と称される、請求項1乃至7のいずれか一項に記載の方法。
【請求項9】
前記それぞれの第1の負荷についての前記要求低減関数(37)の前記出力側体積流量需要(38)は、前記第1の負荷についての前記要求低減関数の入力側体積流量需要から前記乗数と前記体積流量減少との積を減算したものとして決定される、請求項8に記載の方法。
【請求項10】
各前記第2の負荷についての前記低減体積流量は、前記第1の負荷の所望の運動方向又は前記第1の負荷の前記入力側体積流量の符号に依存して決定され、及び/又は、
各前記第2の負荷についての前記低減体積流量は、それぞれの前記第2の負荷の所望の運動方向又はそれぞれの前記第2の負荷の入力側体積流量の符号に依存して決定される、請求項8又は9に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、液圧駆動システムを制御するための方法に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
発明の背景技術
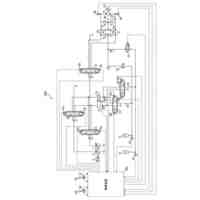
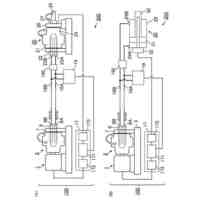
作業機械は、液圧負荷(例えば、液圧シリンダ又は液圧モータ)によって個別に駆動される複数の機能要素を有する液圧駆動部を有し得る。機械的かつ液圧的に制御される関与部又は液圧負荷を有する従来の液圧駆動部の事例においては、それぞれの関与部又は負荷の出力消費を個別に制御することを可能にする、個別の、ひいては分散型の制御装置が使用される。この制御装置又は制御要素は、例えば、関与部又は負荷に割り当てられたバルブであり、このバルブは、例えば、ジョイスティックによって捕捉される、作業機械の操作者の事前設定に基づいて直接的に駆動制御及び操作される。
【発明の概要】
【発明が解決しようとする課題】
【0003】
発明の開示
本発明によれば、独立請求項の特徴を有する、液圧駆動システムを制御するための方法並びにその実施のための計算ユニット及びコンピュータプログラムが提案される。好適な構成は、従属請求項及び以下の明細書の対象である。
【課題を解決するための手段】
【0004】
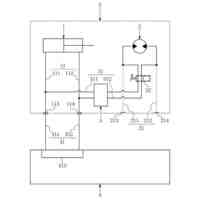
本発明に応じて、圧力媒体源と、バルブアセンブリを介して圧力媒体が供給される複数の液圧負荷と、を備える液圧駆動システムを制御するために、負荷の体積流量要求に対して、1つ又は複数の順次連続する段階のスケーリング関数が使用され、ここで、各段階のスケーリング関数は、負荷の入力側体積流量需要を、負荷の出力側体積流量需要に写像し、各負荷について各スケーリング関数は、負荷の出力側体積流量需要と入力側体積流量需要との間のスケーリング係数を決定する。最後の段階のスケーリング関数の出力側体積流量需要から総体積流量要求が決定され、それに応じて、圧力媒体源が駆動制御される。各負荷について、そのスケーリング係数から総スケーリング係数が決定され、そこからスケーリングされた体積流量要求が決定される。バルブアセンブリは、負荷のスケーリングされた体積流量要求に応じて駆動制御される。スケーリング関数の使用は、スケーリング関数にコード化された、様々な液圧負荷及び/又は液圧機械又はそれらの体積流量間に存在する相関関係又は望ましい条件及びさらなる既存の条件、例えば、圧力媒体源の駆動モータの利用可能な電力又は利用可能なトルクを考慮することを可能にさせる。これにより、液圧駆動システムが使用される機械の負荷によって動かされる複数の部品の共同運動の際に、不所望な挙動、例えば、負荷がオン又はオフに切り替えられる場合に、圧力媒体において要求された体積流量が短時間で大幅に変動するような、個々の部品のぎくしゃくした運動などを回避することが可能になる。すなわち、複数の液圧負荷を同時に使用する場合に、機械の操作者にとって予測可能な一定の制御挙動を達成することができる。
【0005】
一実施形態によれば、最後の段階のスケーリング関数の出力側体積流量需要から総体積流量要求を決定することは、最後の段階のスケーリング関数の出力側体積流量需要の合計を含み、又は、斯かる合計である。このようにして、簡単な方式により、圧力源によって提供されるべき体積流量又は少なくとも提供されるべき最小体積流量を決定することができる。
【0006】
圧力媒体源は、特に、液圧機械と、当該液圧機械を駆動する駆動モータとを備える。一実施形態によれば、液圧機械の変位量は調整可能であり、ここで、総体積流量要求に応じて圧力媒体源を駆動制御することは、液圧機械の変位量を制御することを含む。代替的又は付加的に、総体積流量要求に応じて圧力媒体源を駆動制御することは、駆動モータの回転数を制御すること又は設定することを含み得る。駆動モータは、例えば、内燃機関であり又は電気機械であるものとしてよい。さらに、圧力媒体源の駆動制御は、負荷の圧力要求から決定されるポンプ圧力要求に基づくことができ、ここで、ポンプ圧力要求は、特に、負荷の圧力要求の最大以上のものとして決定される。総じて、これらの(組合せも可能な)実施形態は、圧力媒体源を、それに基づきスケーリングされた体積流量要求に応じて、操作者の所望の要求を満たすように適当に駆動制御することを可能にさせる。
【0007】
一実施形態によれば、スケーリング関数は、要求低減関数を含み、ここで、要求低減関数は、各負荷又は少なくとも1つの負荷について、以下のステップ、すなわち、第1の負荷とは異なる1つ又は複数の第2の負荷が、第1の負荷の要求低減関数の体積流量要求又は入力側体積流量需要をどの程度低減させるかの割合を示す乗数を決定するステップと、それぞれの第2の負荷の体積流量要求及び/又はそれぞれの第2の負荷の要求低減関数の入力側体積流量需要に依存する各第2の負荷についての低減体積流量を決定するステップと、1つ又は複数の第2の負荷の低減体積流量に基づいて、第1の負荷についての体積流量減少を決定するステップと、第1の負荷についての要求低減関数の入力側体積流量需要と、乗数と体積流量減少との積とに基づいて、第1の負荷についての要求低減関数の出力側体積流量需要を決定するステップとを実装し、ここで、これらのステップがそれぞれ実装される負荷は、それぞれ第1の負荷と表記される。要求低減関数は、制御において、様々な液圧負荷の体積流量の既知の相互影響を考慮することを可能にさせる。要求低減関数により、第1の負荷要望を、第2の負荷要求を用いて相応に低減することができる。このことは、例えば、完全なジョイスティック偏位を用いた個々の運動では高速が要求されるが、それぞれ完全なジョイスティック偏位を用いた第1及び第2の負荷による複合運動では比較的低速が要求される場合に有利である。
【0008】
特に、それぞれの第1の負荷についての要求低減関数の出力側体積流量需要は、第1の負荷についての要求低減関数の入力側体積流量需要から乗数と体積流量減少との積を減算したものとして決定することができる。
【0009】
一実施形態によれば、それぞれの第1の負荷の体積流量減少を決定する際に、第1の負荷の体積流量減少が、1つ又は複数の第2の負荷の低減体積流量の最大のもの(又は最大値)として決定される。代替的又は付加的に(例えば、体積流量減少の様々な割合が様々な手法により決定される場合)、それぞれの第1の負荷の体積流量減少を決定する際に、第1の負荷の体積流量減少が、1つ又は複数の第2の負荷の低減体積流量の(特に重み付けされた)平均値として決定される。
【0010】
一実施形態によれば、要求低減関数は、1つ又は複数のスケーリング関数の第1の段階であり、それにより、要求低減関数への入力側体積流量需要は、体積流量要求と同一である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社SUBARU
油圧回路
2か月前
住友建機株式会社
ショベル
2か月前
川崎重工業株式会社
液圧駆動装置
1か月前
川崎重工業株式会社
液圧駆動装置
1か月前
住友建機株式会社
ショベル
2か月前
日立建機株式会社
作業機械
2日前
コベルコ建機株式会社
建設機械
28日前
国立大学法人東北大学
剛性可変索状体
3か月前
トヨタ自動車株式会社
流体漏れ検出装置
2か月前
株式会社工営
シリンダー保護カバー
5か月前
日立建機株式会社
油圧駆動装置
8日前
SMC株式会社
位置検出スイッチ
3か月前
川崎重工業株式会社
マルチコントロールバルブ
1か月前
川崎重工業株式会社
マルチコントロールバルブ
1か月前
川崎重工業株式会社
マルチコントロールバルブ
1か月前
ナブテスコ株式会社
油圧回路
2か月前
川崎重工業株式会社
弁装置
1か月前
川崎重工業株式会社
弁装置
2か月前
アズビル株式会社
パイロットリレー及びポジショナ
4か月前
コベルコ建機株式会社
建設機械の油圧駆動装置
今日
カヤバ株式会社
アクチュエータ
29日前
カヤバ株式会社
流体圧制御装置
20日前
カヤバ株式会社
流体圧シリンダ
28日前
株式会社ジェイテクトフルードパワーシステム
サージタンク
2か月前
学校法人 中央大学
流体圧アクチュエータ
2か月前
パナソニックIPマネジメント株式会社
曲がり管
4か月前
キャタピラー エス エー アール エル
流体圧システム
2か月前
コベルコ建機株式会社
建設機械制御方法、建設機械
4か月前
川崎重工業株式会社
液圧駆動システム、及びマルチコントロール弁
1か月前
株式会社リベックス
水圧制御システム
4か月前
株式会社田口クリエイト
複動型アタッチメント
4か月前
川崎重工業株式会社
弁装置および油圧システム
2か月前
セダーズ-シナイ メディカル センター
クローン病に関連するTNFSF15及びDCR3の変異体
1か月前
キャタピラー エス エー アール エル
作業機械の流体圧回路
3か月前
株式会社ブリヂストン
流体圧アクチュエータ
3か月前
株式会社ブリヂストン
流体圧アクチュエータ
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ