TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025012767
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023115855
出願日
2023-07-14
発明の名称
振動搬送装置
出願人
シンフォニアテクノロジー株式会社
代理人
個人
主分類
B65G
27/32 20060101AFI20250117BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】相互に逆回転する2台の振動モータを引き込み現象を許容する状態で制御することでトラフの振動角を所望の値に調整可能な振動搬送装置を提供する。
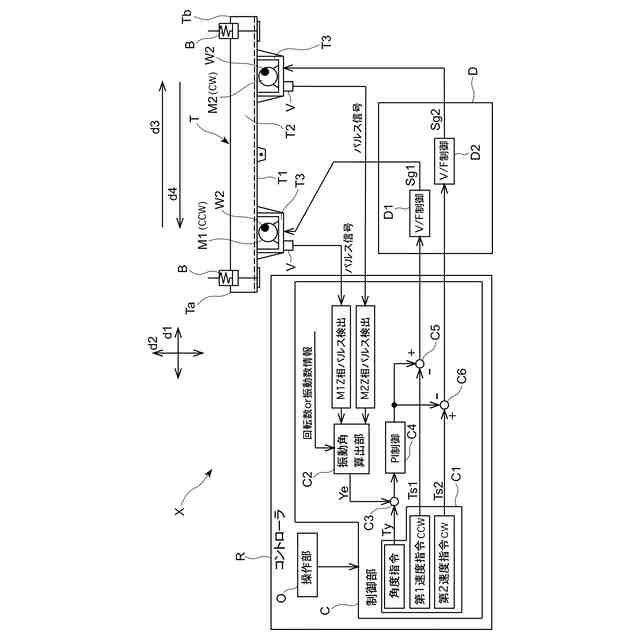
【解決手段】互いに逆回転する第1振動モータM1と第2振動モータM2に対して、トラフTを介した引き込み現象を想定した速度指令に基づきV/Fオープンループ制御にて第1駆動信号Sg1,第2駆動信号Sg2を第1インバータD1,第2インバータD2から出力し、算出した振動角推定値(トラフTが振動するときの角度)を目標振動角に振動角推定値を近付けるべく、第1振動モータM1,第2振動モータM2の回転速度を調整させる制御を実行し、第1駆動信号Sg1、第2駆動信号Sg2により第1振動モータM1及び第2振動モータM2が同期して同じ周波数且つ同じ回転速度で回転するように構成した。
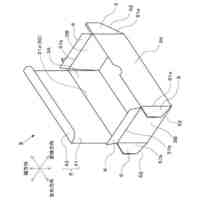
【選択図】図1
特許請求の範囲
【請求項1】
振動することで被搬送物を所定の搬送方向に搬送するトラフと、
回転軸に対して偏心した偏心体を回転させることで、前記トラフが振動するための加振力を前記トラフに加える振動モータと、
前記振動モータを回転駆動させる駆動部と、
前記駆動部による前記振動モータの回転を制御する制御部と、
前記トラフに取り付けられており、当該トラフの振動に伴う加速度、速度及び位置変化の少なくともいずれかである物理量を検出するセンサと、を備え、
前記振動モータは少なくとも第1振動モータと第2振動モータとがあり、前記第1振動モータと前記第2振動モータとは、互いの前記回転軸を、水平方向のうち前記搬送方向と交差する方向に向けて前記トラフに取り付けられており、前記第1振動モータにおける前記回転軸の回転方向は、前記第2振動モータにおける前記回転軸の回転方向と逆方向であり、
前記駆動部は、前記第1振動モータ及び前記第2振動モータに対する速度指令に基づきV/Fオープンループ制御にて駆動信号を出力するものであり、
前記制御部は、
前記センサにより検出された前記物理量に基づいて、前記トラフが振動するときの角度である振動角推定値を算出し、
目標とする前記トラフの振動角度である目標振動角に前記振動角推定値を近付けるべく、前記第1振動モータの回転速度、及び前記第2振動モータの回転速度の少なくともいずれかを前記駆動部に調整させる制御を実行するものであり、
前記駆動信号により前記第1振動モータ及び前記第2振動モータが作動後、これら前記第1振動モータ及び前記第2振動モータが同期して同じ周波数且つ同じ回転速度で回転するように構成していることを特徴とする振動搬送装置。
続きを表示(約 470 文字)
【請求項2】
前記駆動部は、前記第1振動モータに対してV/Fオープンループ制御にて前記駆動信号を出力する第1駆動部と、前記第2振動モータに対してV/Fオープンループ制御にて前記駆動信号を出力する第2駆動部とを備えており、第1駆動部により前記第1振動モータの回転速度を調整するとともに、前記第2駆動部により前記第2振動モータの回転速度を調整するものである請求項1に記載の振動搬送装置。
【請求項3】
前記制御部において、前記目標振動角に対応して、予め前記第1振動モータ及び前記第2振動モータの基準周波数からの乖離値が設定されており、
前記第1駆動部は、前記制御部で指定された前記目標振動角に対応する前記乖離値を前記基準周波数に加算または減算した周波数を前記駆動信号として前記第1振動モータに出力するものであり、
前記第2駆動部は、前記目標振動角に対応する前記乖離値を前記基準周波数に減算または加算した周波数を前記駆動信号として前記第2振動モータに出力するものである請求項2に記載の振動搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、トラフを振動させて被搬送物を搬送する振動搬送装置に関するものである。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
特許文献1には、2つの振動モータの回転によりトラフを振動させて、トラフに供給された被搬送物を搬送する振動搬送装置が記載されている。振動モータは、回転軸に対して偏心する偏心体を有しており、偏心体が回転することで、トラフに対して加振力を与えることができる。特許文献1では、2つの振動モータから検出された位相差を用いて各振動モータの偏心体における機械角が同期する位相を調整することで、トラフの振動角を制御できることが記載されている。
【0003】
しかしながら、振動搬送装置において、振動モータにおける偏心体の位相差を用いて振動角を制御する構成では、例えば、トラフに対する外乱に起因して、位相差と振動角との間の関係が変化し、トラフの振動角を所望とする角度に制御できない場合がある。また、振動モータの位相を検出するためのセンサが必要となるため、振動モータの構成が複雑化することも懸念される。
【0004】
そこで、本出願人は、振動モータの位相を検出することなく、トラフを所定の振動角に制御して被搬送物を搬送可能な振動搬送装置を案出した(下記、特許文献2)。具体的には、制御部が、トラフに取り付けたセンサにより検出された物理量(例えば、トラフの振動に伴う加速度、速度及び位置変化の少なくともいずれか)に基づいて振動角推定値(トラフが振動するときの角度)を算出し、当該振動角推定値を目標角度に近付けるべく、第1振動モータの回転速度及び第2振動モータの回転速度を駆動部(第1振動モータを回転駆動させる第1インバータ、第2振動モータを回転駆動させる第2インバータ)に調整させる振動搬送装置を案出している。
【先行技術文献】
【特許文献】
【0005】
特表平11-511106号公報
特開2022-184324号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献2記載の振動搬送装置では、2台の振動モータをそれぞれ独立して制御可能であるという考えに基づき、各振動モータに対して速度制御を個別に行う構成が採用されているが、実際には、2台の振動モータのそれぞれの振動による反力が設置面(この場合は2台のモータがともに取り付けられているトラフ)を通して互いに作用し合い、影響し合い、同じ周波数で動く引き込み現象(同期現象)が生じようとする。
【0007】
しかしながら、各振動モータに対して個別の速度指令によって独立して速度制御を行おうとするものの、自然現象である引き込み現象(同期現象)が否応なく生じようとする。すなわち、速度指令に基づく回転数で各振動モータをそれぞれ回転させようとする一方で、各振動モータの作動後はトラフを介した引き込み現象(同期現象)が生じて2台の振動モータが同期して同じ周波数で回転しようとすることになり、その間でせめぎ合いが起こって速度指令による制御も引き込み現象も収束せず、目標値である回転速度に到達しないことがあるということを本発明者は究明した。なお、引き込み現象を振り切るだけの大きなトルクを持つモータを使用すれば、目標速度まで到達させることは可能であるが、コスト面で非現実的である。
【0008】
本発明は、このような課題に着目してなされたものであって、主たる目的は、少なくとも相互に逆回転する2台の振動モータを引き込み現象(同期現象)を許容する状態で制御することでトラフの振動角を所望の値に調整可能な振動搬送装置を提供することである。
【課題を解決するための手段】
【0009】
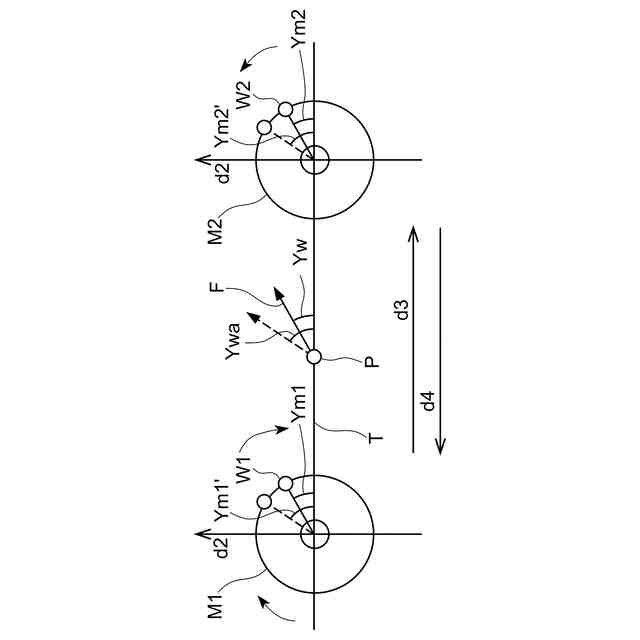
すなわち、本発明に係る振動搬送装置は、振動することで被搬送物を所定の搬送方向に搬送するトラフと、回転軸に対して偏心した偏心体を回転させることで、トラフが振動するための加振力をトラフに加える振動モータと、振動モータを回転駆動させる駆動部と、駆動部による振動モータの回転を制御する制御部と、トラフに取り付けられており、当該トラフの振動に伴う加速度、速度及び位置変化の少なくともいずれかである物理量を検出するセンサとを備えたものである。そして、本発明に係る振動搬送装置は、振動モータとして少なくとも第1振動モータと第2振動モータがあり、第1振動モータ及び第2振動モータの回転軸を、水平方向のうち搬送方向と交差する方向に向けてトラフに取り付け、第1振動モータにおける回転軸の回転方向と、第2振動モータにおける回転軸の回転方向とを逆方向に設定し、駆動部が、第1振動モータ及び第2振動モータに対する速度指令に基づきV/F制御(速度制御のために周波数を変化させる際に、周波数に対応した電圧(V/F特性)を出力する制御)且つオープンループ制御(開ループ制御;フィードバック・ループがなく、指令値の応答に対して開放状態の制御)にて駆動信号を出力するものであり、制御部が、センサにより検出された物理量に基づいてトラフが振動するときの角度である振動角推定値を算出し、振動角推定値を目標角度に近付けるべく、第1振動モータの回転速度、及び第2振動モータの回転速度の少なくともいずれかを駆動部に調整させる制御を実行するものであり、V/Fオープンループ制御にて駆動部から出力した駆動信号により第1振動モータ及び第2振動モータが作動後、これら第1振動モータ及び第2振動モータが同期して(同じ周波数で動く現象が生じて)同じ回転速度で回転するように構成していることを特徴としている。
【0010】
本発明者は、共通のトラフに取り付けられた2つの振動モータが駆動すると、各振動モータの振動がトラフを介して引き込み現象が生じて各振動モータの回転が同期しようとする自然現象を考慮せずに駆動信号を出し、2台の振動モータを個別に駆動させて目標とする振動角の振動をトラフに実現させようとしても、各振動モータに対する速度指令と引き込み現象とのせめぎ合いが生じる結果として2台の振動モータを目標の回転速度で回転させることが困難であるという上述の検討結果を得た。このことから、引き込み現象(同期現象)が自然に生じることを当初から制御の目標に入れて考慮すると、各振動モータの回転数や回転速度をセンサで検出する必要はなく、トラフから検出した物理量に基づいて算出した振動角推定値を目標角度に近付けるような第1振動モータの回転速度と第2振動モータの回転速度の少なくともいずれかを駆動部に調整させるための駆動信号を各インバータから各振動モータにそれぞれ出力した後は、敢えてオープンループ制御として、トラフを介した第1振動モータと第2振動モータの間で生じる引き込み現象(同期現象)に委ねることとすれば、速度指令と引き込み現象とのせめぎ合いが生じず、引き込み現象が収束した後には所定の回転速度で同期した各モータが駆動するということに想到し、本発明を案出するに至った。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
箱
3か月前
個人
ゴミ箱
3か月前
個人
包装体
4か月前
個人
収納用具
7か月前
個人
物品収納具
7か月前
個人
容器
17日前
個人
折り畳み水槽
4か月前
個人
パウチ補助具
3か月前
個人
閉塞装置
1か月前
個人
掃除楽々ゴミ箱
8か月前
個人
ダンボール宝箱
4か月前
個人
圧縮収納袋
4か月前
株式会社和気
包装用箱
4日前
個人
ゴミ処理機
11日前
個人
塗料容器用蓋
4か月前
個人
包装箱
1か月前
三甲株式会社
容器
6か月前
株式会社新弘
容器
3か月前
個人
粘着テープ剥がし具
9か月前
個人
粘着テープ剥がし具
5か月前
三甲株式会社
容器
6か月前
株式会社イシダ
包装装置
3か月前
株式会社新弘
容器
3か月前
個人
粘着テープ切断装置
6か月前
三甲株式会社
蓋体
19日前
株式会社イシダ
箱詰装置
6か月前
積水樹脂株式会社
接着剤
3か月前
積水樹脂株式会社
接着剤
8か月前
株式会社デュプロ
包装装置
3か月前
個人
ゴミ箱用ゴミ袋保持具
3か月前
株式会社シプソル
梱包装置
1か月前
日東精工株式会社
検査装置
7か月前
三甲株式会社
トレー
8か月前
株式会社joze
攪拌容器
7か月前
個人
水切りネットの保持具
4日前
日東精工株式会社
供給装置
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ