TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025009899
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2024092800
出願日
2024-06-07
発明の名称
自動走行方法、自動走行プログラム、及び自動走行システム
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250109BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】直進走行及び旋回走行を相互に切り替える際の作業車両の挙動を安定させることが可能な自動走行方法、自動走行プログラム、及び自動走行システムを提供する。
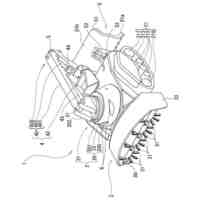
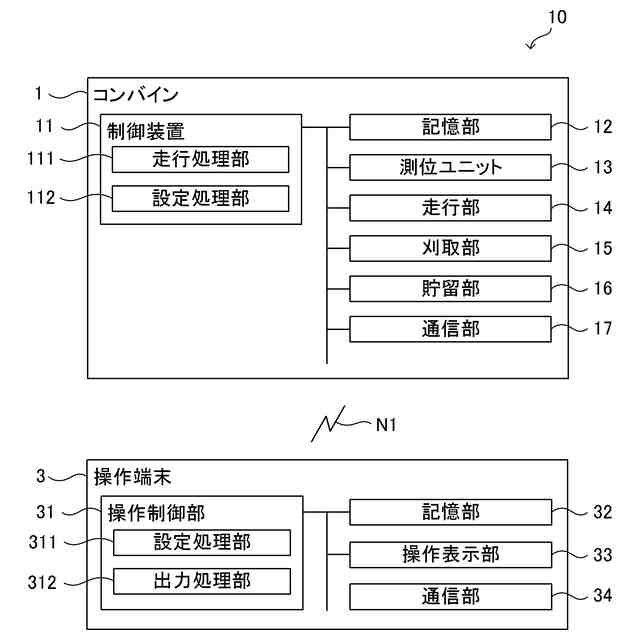
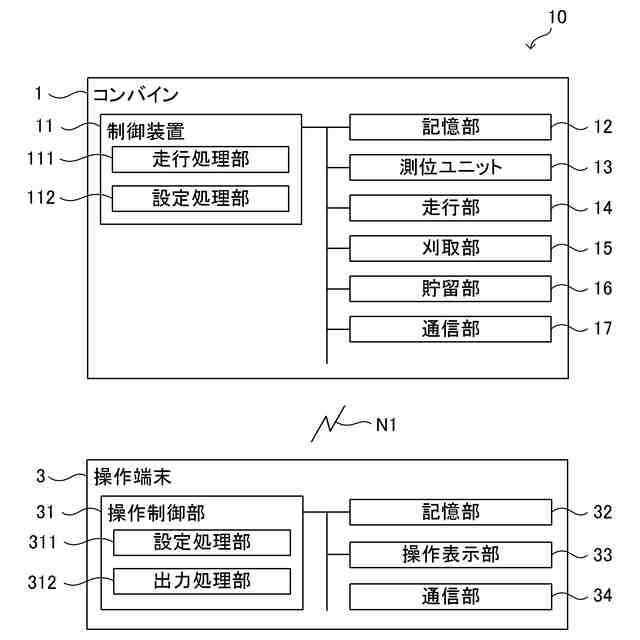
【解決手段】自動走行システム10は、コンバイン1を直進経路及び旋回経路を含む目標経路に従って自動走行させる。設定処理部112は、コンバイン1が前記直進経路及び前記旋回経路の一方から他方に移動する場合に、直進用目標位置及び旋回用目標位置の少なくともいずれかのコンバイン1からの距離を、コンバイン1の走行に応じて設定する。走行処理部111は、コンバイン1を前記直進用目標位置又は前記旋回用目標位置に追従するように走行させる。
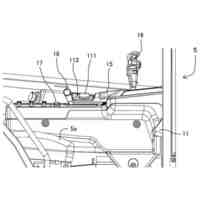
【選択図】図1
特許請求の範囲
【請求項1】
作業車両を直進経路及び旋回経路を含む目標経路に従って自動走行させる自動走行方法であって、
前記作業車両が前記直進経路及び前記旋回経路の一方から他方に移動する場合に、直進用目標位置及び旋回用目標位置の少なくともいずれかの前記作業車両からの距離を、前記作業車両の走行に応じて設定することと、
前記作業車両を前記直進用目標位置又は前記旋回用目標位置に追従するように走行させることと、
を実行する自動走行方法。
続きを表示(約 880 文字)
【請求項2】
前記作業車両が前記直進経路の終端位置に到達した場合に、前記旋回経路上における前記作業車両から第1距離だけ離れた位置に前記旋回用目標位置を設定し、前記作業車両が前記終端位置より進行方向側に移動した場合に、前記旋回経路上における前記作業車両から前記第1距離よりも長い第2距離だけ離れた位置に前記旋回用目標位置を設定する、
請求項1に記載の自動走行方法。
【請求項3】
前記終端位置から進行方向側に移動する前記作業車両までの距離に応じて、前記作業車両から前記旋回用目標位置までの距離を設定する、
請求項2に記載の自動走行方法。
【請求項4】
前記終端位置から進行方向側に移動する前記作業車両までの距離が長くなるほど、前記作業車両から前記旋回用目標位置までの距離を長く設定する、
請求項2に記載の自動走行方法。
【請求項5】
前記作業車両から前記直進用目標位置までの距離よりも短い所定距離以下の範囲で、前記作業車両から前記旋回用目標位置までの距離を設定する、
請求項2に記載の自動走行方法。
【請求項6】
前記直進経路と前記旋回経路との間に所定長さの非作業経路を生成する、
請求項2に記載の自動走行方法。
【請求項7】
前記所定長さは、前記作業車両の長さに基づいて設定される、
請求項6に記載の自動走行方法。
【請求項8】
前記第1距離を前記所定長さに設定する、
請求項6に記載の自動走行方法。
【請求項9】
前記作業車両が前記非作業経路の始端位置に到達した場合に、前記旋回用目標位置を前記旋回経路の始端位置に設定する、
請求項6に記載の自動走行方法。
【請求項10】
前記作業車両が前記非作業経路の始端位置から進行方向側に移動するに従って、前記第1距離を長くする、
請求項9に記載の自動走行方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両を目標経路に従って自動走行させる技術に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
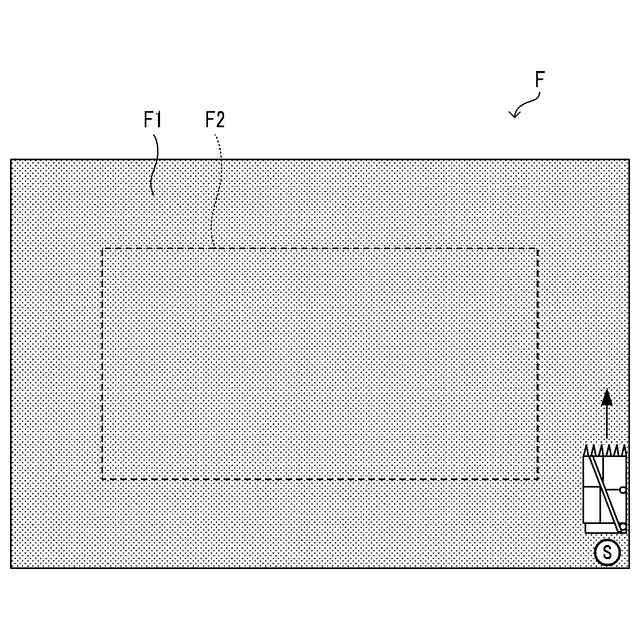
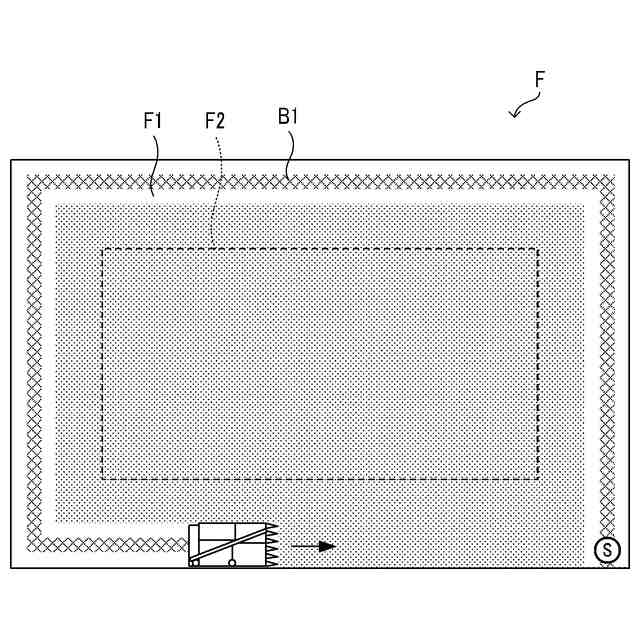
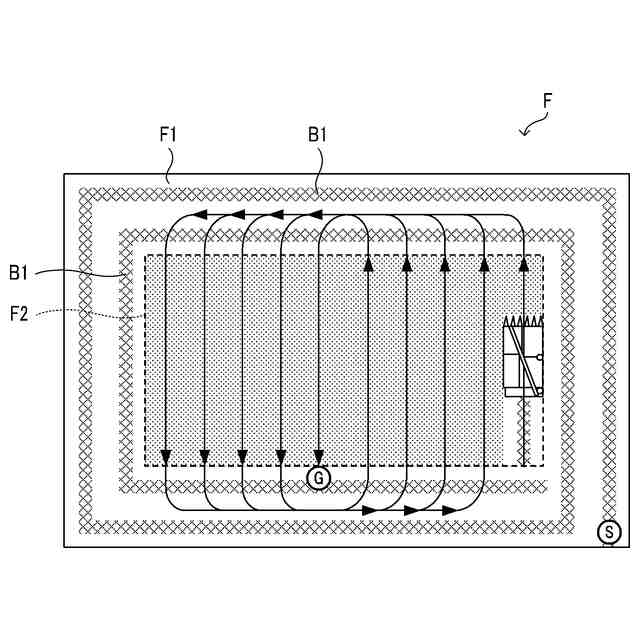
従来、圃場において、作業車両(例えばコンバイン)を予め設定された目標経路に従って自動走行させるシステムが知られている。例えば、前記作業車両は、圃場において、目標経路に従って開始位置から終了位置まで直進経路及び旋回経路を自動走行しながら穀稈の刈取作業を行う(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-078440号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
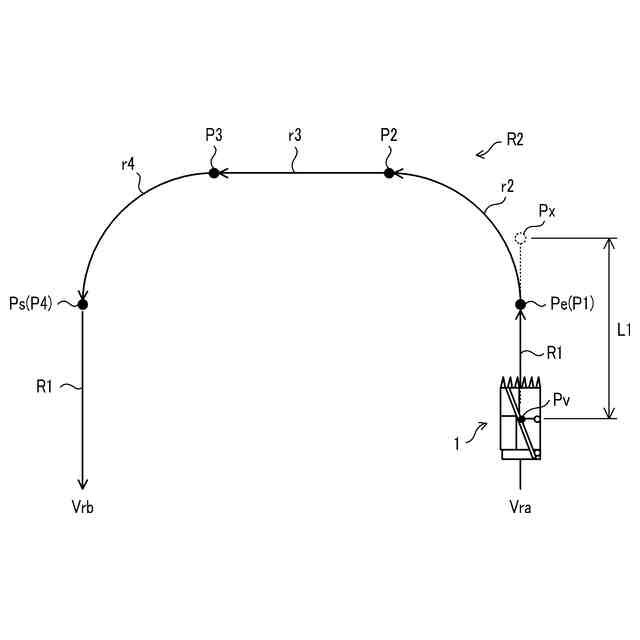
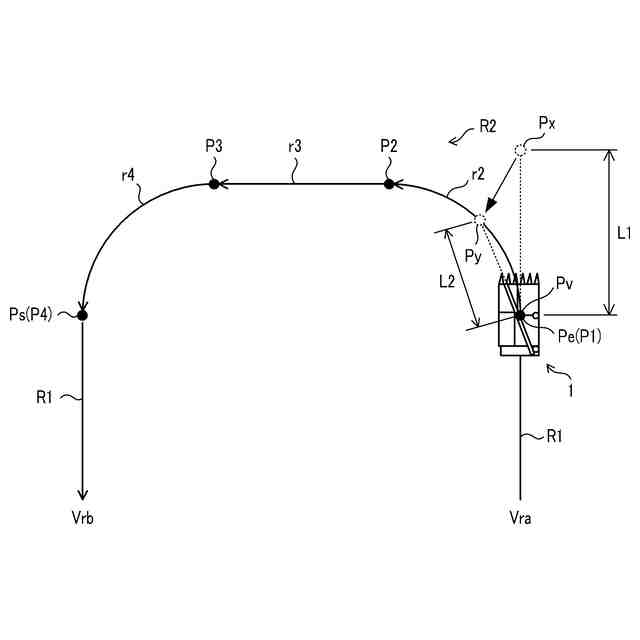
従来のシステムは、例えば、作業車両が直進経路を走行する場合に直進経路の延長線上に目標位置を設定することにより作業車両を直進経路の終端位置まで直進走行させ、作業車両が直進経路の終端位置(旋回経路の始端位置)に到達した場合に、目標位置を旋回経路上の予め設定された距離だけ離れた位置に変更することにより作業車両を旋回経路に従って旋回走行させる。
【0005】
しかし、上記走行方法では、目標位置が直進経路の延長線上の位置から旋回経路上の位置に急に切り替わるため、操舵量が大きくなり作業車両の挙動が不安定になる問題が生じる。
【0006】
本発明の目的は、直進走行及び旋回走行を相互に切り替える際の作業車両の挙動を安定させることが可能な自動走行方法、自動走行プログラム、及び自動走行システムを提供することにある。
【課題を解決するための手段】
【0007】
本発明に係る自動走行方法は、作業車両を直進経路及び旋回経路を含む目標経路に従って自動走行させる自動走行方法であって、前記作業車両が前記直進経路及び前記旋回経路の一方から他方に移動する場合に、直進用目標位置及び旋回用目標位置の少なくともいずれかの前記作業車両からの距離を、前記作業車両の走行に応じて設定することと、前記作業車両を前記直進用目標位置又は前記旋回用目標位置に追従するように走行させることと、を実行する。
【0008】
本発明に係る自動走行方法は、作業車両を目標経路に従って自動走行させる自動走行方法であって、第1直進経路と、前記第1直進経路に接続する第2直進経路と、前記第2直進経路に接続する旋回経路とを生成することと、前記作業車両が前記第2直進経路の始端位置に到達した場合に、前記旋回経路上に旋回用目標位置を設定することと、前記作業車両を前記旋回用目標位置に追従するように走行させることと、を実行する。
【0009】
本発明に係る自動走行プログラムは、作業車両を直進経路及び旋回経路を含む目標経路に従って自動走行させる自動走行プログラムであって、前記作業車両が前記直進経路及び前記旋回経路の一方から他方に移動する場合に、直進用目標位置及び旋回用目標位置の少なくともいずれかの前記作業車両からの距離を、前記作業車両の走行に応じて設定することと、前記作業車両を前記直進用目標位置又は前記旋回用目標位置に追従するように走行させることと、を一又は複数のプロセッサーに実行させるための自動走行プログラムである。
【0010】
本発明に係る自動走行システムは、作業車両を直進経路及び旋回経路を含む目標経路に従って自動走行させる。前記自動走行システムは、設定処理部と走行処理部とを備える。前記設定処理部は、前記作業車両が前記直進経路及び前記旋回経路の一方から他方に移動する場合に、直進用目標位置及び旋回用目標位置の少なくともいずれかの前記作業車両からの距離を、前記作業車両の走行に応じて設定する。前記走行処理部は、前記作業車両を前記直進用目標位置又は前記旋回用目標位置に追従するように走行させる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
除草具
22日前
個人
ベアスタンガン
22日前
井関農機株式会社
収穫機
25日前
井関農機株式会社
収穫機
25日前
個人
ペット用玩具
19日前
個人
獣罠捕獲検知システム
22日前
個人
植裁物への水やり装置
4日前
個人
根掛りしないイカ用疑似餌
22日前
タキイ種苗株式会社
レタス植物
12日前
井関農機株式会社
作業車両
25日前
株式会社ロッソ
植物栽培器
8日前
株式会社ロッソ
植物栽培器
8日前
みのる産業株式会社
移植装置
19日前
株式会社エスク
鳥獣忌避装置
22日前
株式会社サクマ
植物収容構造
25日前
個人
ルアー
12日前
株式会社東海化成
ポット保持具
18日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
コンバイン
4日前
個人
四足歩行動物用被服パターンの設計方法
25日前
株式会社タカキタ
収穫機の前処理装置
26日前
株式会社クボタ
作業機
5日前
株式会社タカキタ
収穫機の前処理装置
25日前
AGRIST株式会社
収穫装置
15日前
株式会社BARKS
ペット収容袋付衣類
5日前
日本製紙クレシア株式会社
ペット用吸収性物品
25日前
株式会社クボタ
コンバイン
25日前
株式会社クボタ
コンバイン
25日前
株式会社クボタケミックス
弁装置
19日前
日本製紙クレシア株式会社
ペット用吸収性物品
5日前
大日本除蟲菊株式会社
薬剤揮散装置
12日前
株式会社シマノ
ルアー
22日前
グローブライド株式会社
釣竿ケース
11日前
株式会社ササキコーポレーション
農作業機
19日前
南京大学
藻類バイオフィルムの高速成膜方法
22日前
株式会社デンソー
潅水システム
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ