TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025009378
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023112350
出願日
2023-07-07
発明の名称
車両制御プログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人深見特許事務所
主分類
B60W
50/023 20120101AFI20250110BHJP(車両一般)
要約
【課題】ICMの退避走行制御とVCIBからの制御要求に応じた制御との干渉防止。
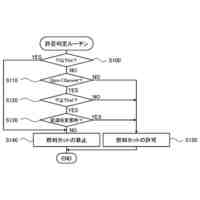
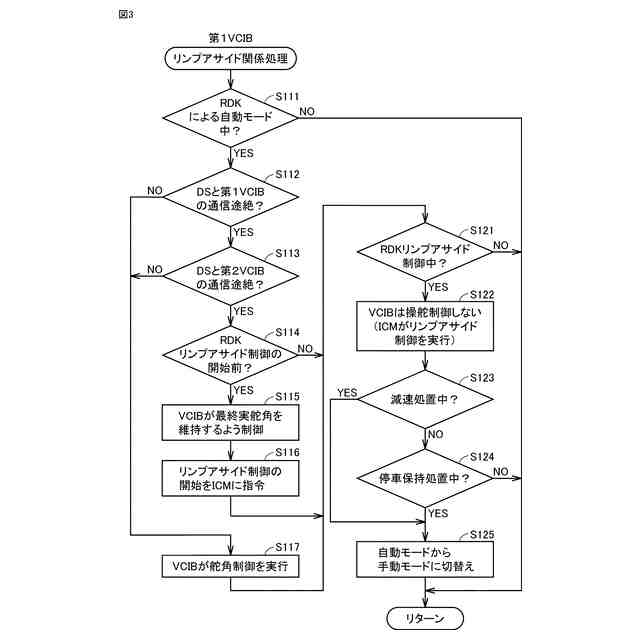
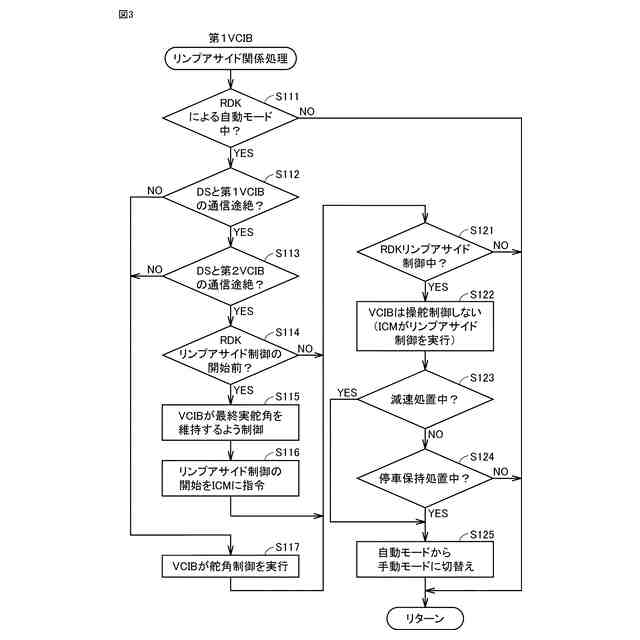
【解決手段】車両制御プログラムは、DSと、DSからの指令に従って自動運転を行うVPとの間に接続されるVCIBで実行される。VCIBは、信号ごとに定義された所定のAPIを含むプログラムが格納されたメモリと、プログラムの実行によりDSからの指令に応じてVPを制御するプロセッサとを備える。VCIBは、手動/自動モードを有する。VPは、手動モードで手動による運転操作を受付可能であり、自動モードでDSからの指令を受付可能である。車両制御プログラムは、VCIBとDSとの通信不能を条件に、VCIBと異なるICMによる退避走行を開始させるための処理を実行するステップ(S112,3,6)と、ICMによる退避走行の開始を条件に、自動モードから手動モードへ切替えるステップ(S121,5)とを、プロセッサに実行させる。
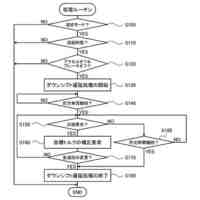
【選択図】図3
特許請求の範囲
【請求項1】
自動運転システムと、前記自動運転システムからの指令に従って自動運転を行う車両プラットフォームとの間に接続される車両制御装置で実行される車両制御プログラムあって、
前記車両制御装置は、
信号ごとに定義された所定のAPIを含むプログラムが格納されたメモリと、
前記プログラムを実行することによって前記自動運転システムからの指令に応じて前記車両プラットフォームを制御するプロセッサとを備え、
前記車両制御装置は、車両モードとして、手動運転モードと、自動運転モードとを有し、
前記車両プラットフォームは、
前記手動運転モードにおいて手動による運転操作を受付可能であり、
前記自動運転モードにおいて前記自動運転システムからの指令を受付可能であり、
前記車両制御プログラムは、
前記車両制御装置と前記自動運転システムとの通信が不能となったことを条件として、前記車両制御装置と異なる走行制御装置による退避走行を開始させるための処理を実行するステップと、
前記走行制御装置による前記退避走行が開始されたことを条件として、前記自動運転モードから前記手動運転モードへ切替えるステップとを、前記プロセッサに実行させる、車両制御プログラム。
続きを表示(約 550 文字)
【請求項2】
前記車両制御プログラムは、前記走行制御装置による前記退避走行が開始され、かつ、減速処置中、または、停車保持処置中であることを条件として、前記自動運転モードから前記手動運転モードへ切替えるステップとを、前記プロセッサに実行させる、請求項1に記載の車両制御プログラム。
【請求項3】
前記車両制御プログラムは、前記走行制御装置による前記退避走行を開始させるための処理の実行後、前記走行制御装置による前記退避走行が開始されるまでは、前記車両制御装置が舵角制御を実行するステップを、前記プロセッサに実行させる、請求項1に記載の車両制御プログラム。
【請求項4】
前記車両制御プログラムは、前記退避走行を開始させるための処理の実行後、前記走行制御装置による前記退避走行が開始されるまでに実行する舵角制御として、最終実舵角を維持する制御を実行するステップを、前記プロセッサに実行させる、請求項3に記載の車両制御プログラム。
【請求項5】
前記車両制御プログラムは、前記車両制御装置と前記自動運転システムとの通信が可能である場合、前記車両制御装置が舵角制御を実行するステップを、前記プロセッサに実行させる、請求項1に記載の車両制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
この開示は、車両制御プログラムに関し、特に、自動運転システムと、前記自動運転システムからの指令に従って自動運転を行う車両プラットフォームとの間に接続される車両制御装置で実行される車両制御プログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
車両および情報処理装置が協働して自動運転を実行するシステムがあった(たとえば、特許文献1参照)。このシステムにおいては、情報処理装置は、自動運転制御ソフトウェアによって制御情報を自動的に生成し、車両へ送信する。車両は、受信した制御情報に基づいて自動運転を行う。
【先行技術文献】
【特許文献】
【0003】
特開2019-177807号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のシステムにおいて、情報処理装置からの制御情報を受信する車両制御装置が設けられる。また、この車両制御装置とは別に、車両制御装置から指令を受けて車両の走行を制御する走行制御装置が設けられる場合がある。車両の退避走行を実行する場合に、走行制御装置が退避走行を制御することが考えられる。この走行制御装置による退避走行の制御中に、この退避走行の制御と、車両制御装置からの制御要求に応じた制御とが干渉することが考えられる。
【0005】
この開示は、上述した課題を解決するためになされたものであって、その目的は、走行制御装置による退避走行の制御と、車両制御装置からの制御要求に応じた制御とが干渉しないようにすることが可能な車両制御プログラムを提供することである。
【課題を解決するための手段】
【0006】
この開示に係る車両制御プログラムは、自動運転システムと、自動運転システムからの指令に従って自動運転を行う車両プラットフォームとの間に接続される車両制御装置で実行される。車両制御装置は、信号ごとに定義された所定のAPIを含むプログラムが格納されたメモリと、プログラムを実行することによって自動運転システムからの指令に応じて車両プラットフォームを制御するプロセッサとを備える。車両制御装置は、車両モードとして、手動運転モードと、自動運転モードとを有する。車両プラットフォームは、手動運転モードにおいて手動による運転操作を受付可能であり、自動運転モードにおいて自動運転システムからの指令を受付可能である。車両制御プログラムは、車両制御装置と自動運転システムとの通信が不能となったことを条件として、車両制御装置と異なる走行制御装置による退避走行を開始させるための処理を実行するステップと、走行制御装置による退避走行が開始されたことを条件として、自動運転モードから手動運転モードへ切替えるステップとを、プロセッサに実行させる。
【0007】
このような構成によれば、走行制御装置による退避走行が開始されたことを条件として、車両制御装置の車両モードが自動運転モードから手動運転モードに切替えられる。このため、車両制御装置から走行制御装置に制御要求が出されなくなる。その結果、走行制御装置による退避走行の制御と、車両制御装置からの制御要求に応じた制御とが干渉しないようにすることが可能な車両制御プログラムを提供することができる。
【図面の簡単な説明】
【0008】
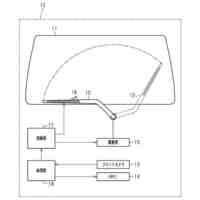
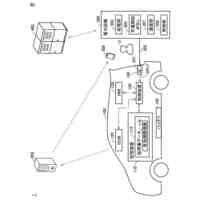
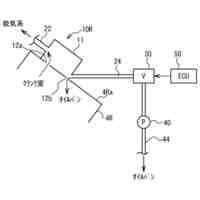
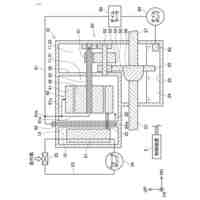
この開示の実施の形態に係る車両の概略構成を示す図である。
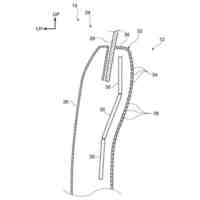
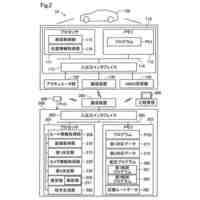
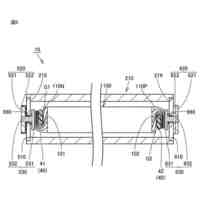
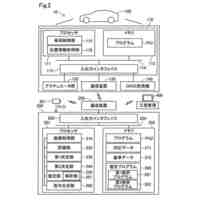
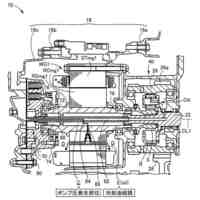
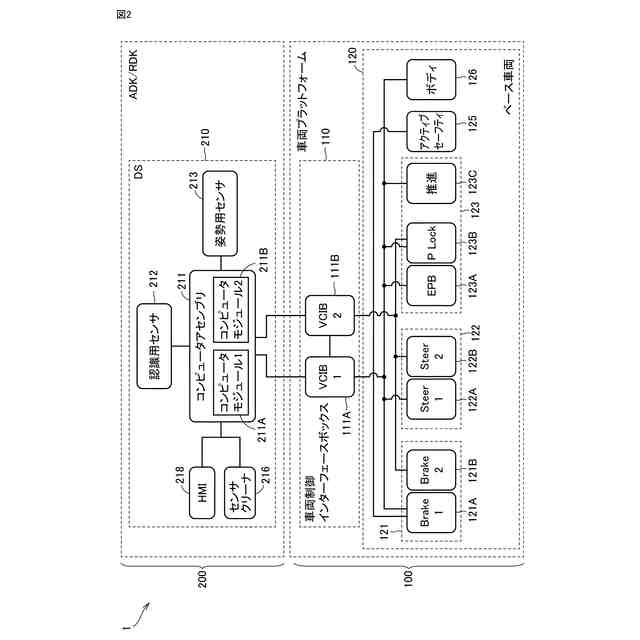
車両の内部の制御システムを示す図である。
VCIBによって実行されるリンプアサイド関係処理の流れを示すフローチャートである。
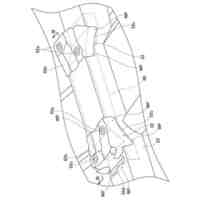
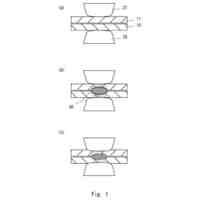
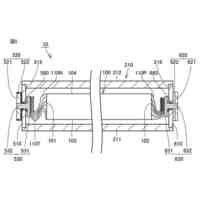
DSとVCIBとの通信が途絶した場合の舵角制御の遷移を説明するための図である。
【発明を実施するための形態】
【0009】
以下、この開示の実施の形態について、図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰り返さない。
【0010】
図1は、この開示の実施の形態に係る車両1の概略構成を示す図である。図1を参照して、車両1は、VP(車両プラットフォーム)100と自動運転モジュール200とを備える。自動運転モジュール200は、自律運転(すなわち、車両単独の自動運転)のための自律運転キット(ADK:Autonomous Driving Kit)と、遠隔運転(すなわち、車両外部からの信号に基づく自動運転)のための遠隔運転キット(RDK:Remote Driving Kit)との両方として機能する。自律運転では、車両1が単独で走行できる。自律運転によれば、車両1の外部からも車内の人(運転者)からも指示を受けることなく車両1が走行できる。自律運転は、一般に「完全自動運転」と称される自動運転であってもよい。遠隔運転では、車両1が車内の人(運転者)から指示を受けることなく走行できる。遠隔運転中の車両1は、車両外部の装置からの指示に基づいて走行してもよいし、車両外部の人による遠隔操作に基づいて走行してもよい。遠隔運転のための走行計画は、車両外部からの信号に基づいて車両1が生成してもよいし、車両1の外部(例えばクラウドCL)で生成されてもよい。この実施の形態では、自律運転と遠隔運転とのいずれにおいても、車両1が自動運転のための走行計画を生成する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
方法
26日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
システム
12日前
トヨタ自動車株式会社
エンジン
4日前
トヨタ自動車株式会社
二次電池
4日前
トヨタ自動車株式会社
システム
12日前
トヨタ自動車株式会社
固体電池
1日前
トヨタ自動車株式会社
固体電池
1日前
トヨタ自動車株式会社
検査方法
1日前
トヨタ自動車株式会社
駆動装置
13日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
蓄電セル
13日前
トヨタ自動車株式会社
積層コア
13日前
トヨタ自動車株式会社
蓄電セル
4日前
トヨタ自動車株式会社
切断装置
4日前
トヨタ自動車株式会社
二次電池
12日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ