TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025008058
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023109907
出願日
2023-07-04
発明の名称
自律走行車両装置
出願人
株式会社ソミックマネージメントホールディングス
代理人
個人
主分類
G05D
1/43 20240101AFI20250109BHJP(制御;調整)
要約
【課題】傾斜した路面に対して屈曲して延びる後続路面に移行する際に障害物などの検知対象物の検知外れを抑制することができる自律走行車両装置を提供する。
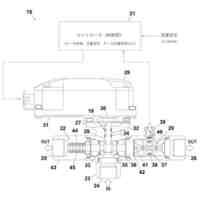
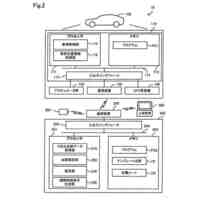
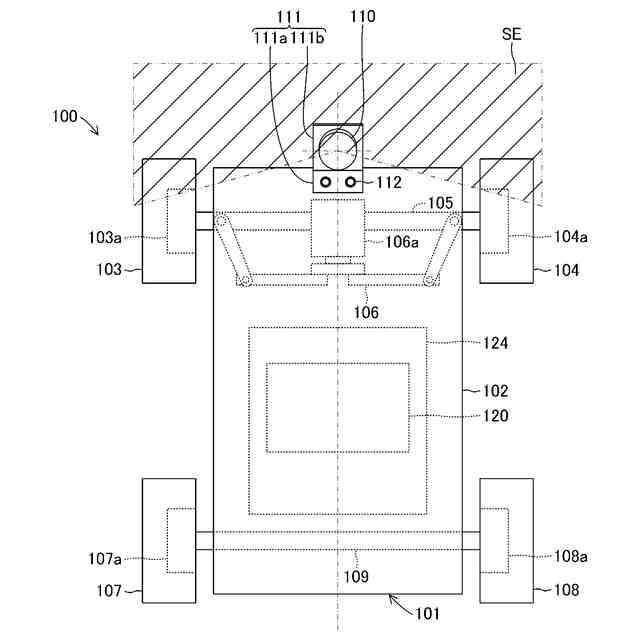
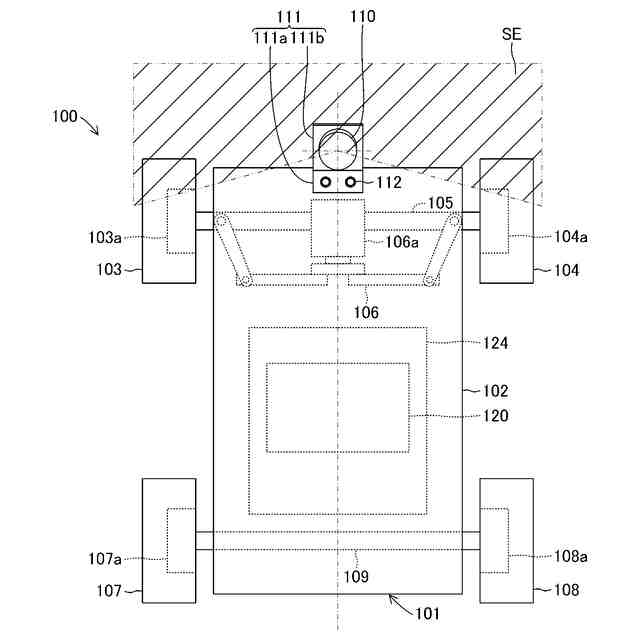
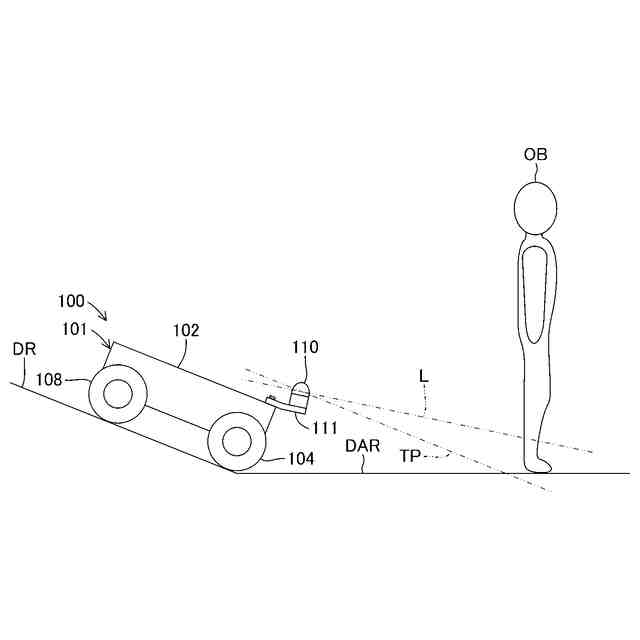
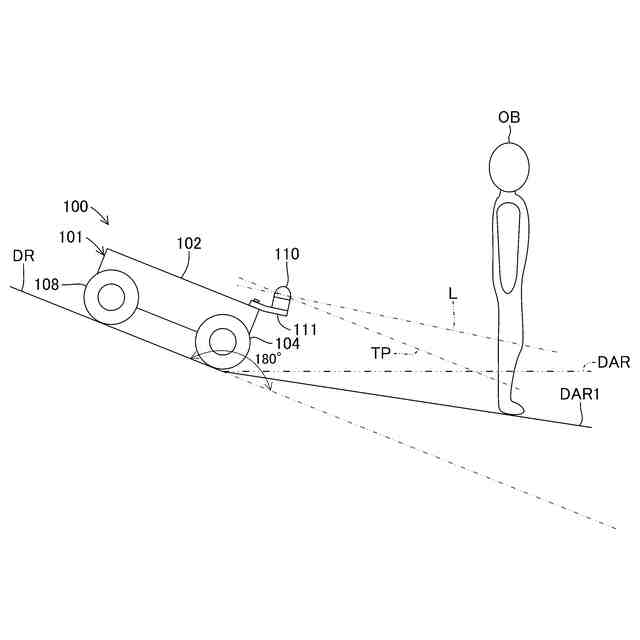
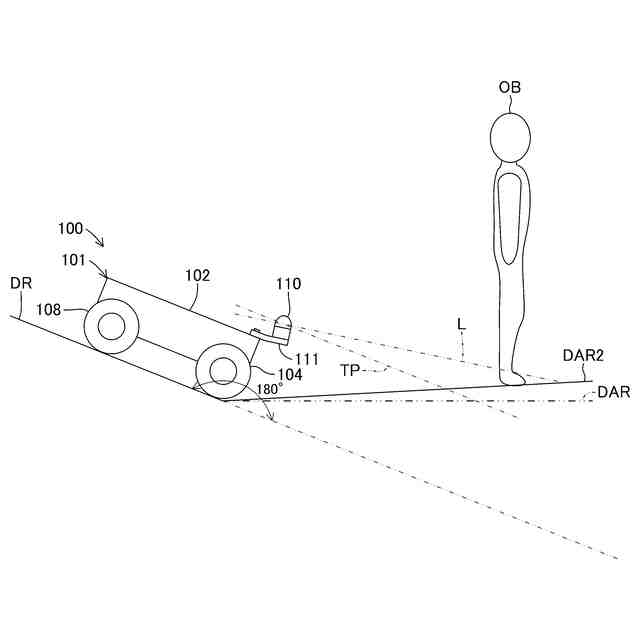
【解決手段】自律走行車両装置100は、下り路面DRに対して180°未満の角度範囲で屈曲して延びる下り後続路面DARを自走する自走車両体101を備えている。自走車両体101は、自走車両体101の前方の検知対象物OBを検知するための光学センサ110および制御装置120をそれぞれ備えている。光学センサ110は、下り路面DRと平行な仮想平面TPよりも上側に光を発する上向き角度で取り付けられている。制御装置120は、自走車両体の前方に存在する検知対象物OBとの距離を算出する測距部121と、測距部121によって算出された距離情報に基づいて自走車両体の走行または操舵のうちの少なくとも一方を制御する自律走行制御部122とを備えている。
【選択図】 図2
特許請求の範囲
【請求項1】
水平面に対して下り傾斜となる下り路面に対して180°未満の角度範囲で屈曲して延びる下り後続路面を自走する自走車両体と、
前記自走車両体の走行方向の前方に向けて設けられて直線状に光を発するとともにこの光の反射光を受光する光学センサと、
前記光学センサによる検出信号を用いて前記自走車両体の前方に存在する物体との距離を算出する測距部と、
前記測距部によって算出された距離情報に基づいて前記自走車両体の走行または操舵のうちの少なくとも一方を制御する自律走行制御部とを備え、
前記光学センサは、
前記下り路面と平行な仮想平面よりも上側に前記光を発する上向き角度で設けられていることを特徴とする自律走行車両装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載した自律走行車両装置において、
前記光学センサは、
前記物体の高さの半分以下の高さ位置に設けられていることを特徴とする自律走行車両装置。
【請求項3】
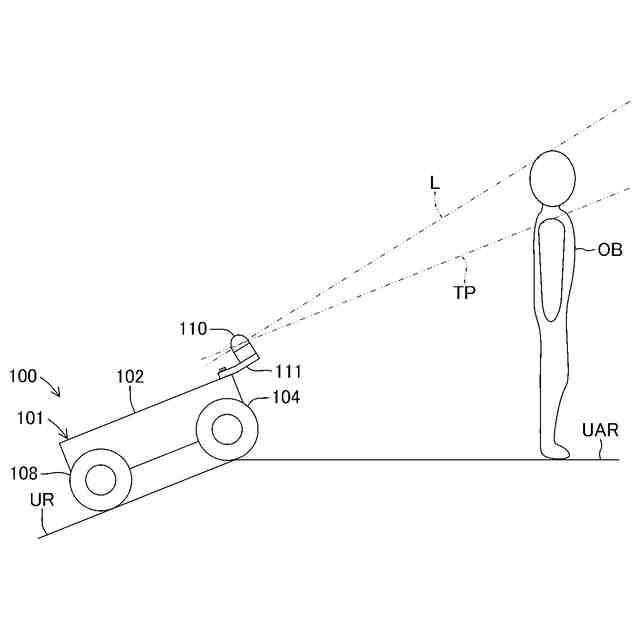
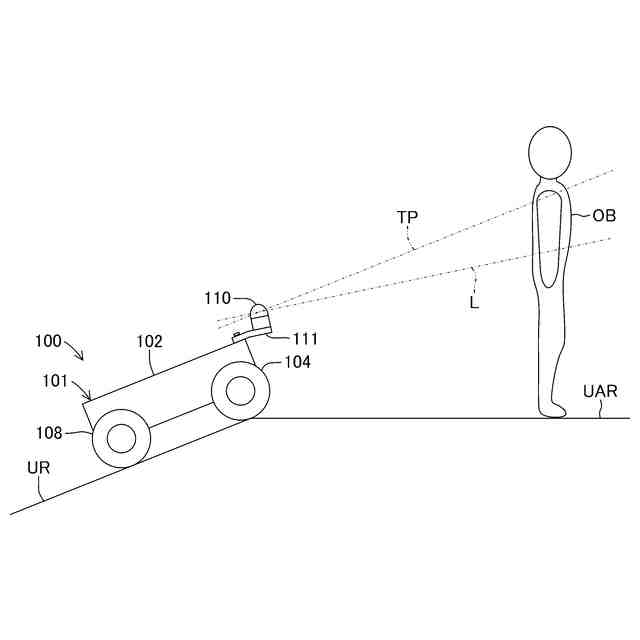
水平面に対して上り傾斜となる上り路面に対して180°を超える角度範囲で屈曲して延びる上り後続路面を自走する自走車両体と、
前記自走車両体の走行方向の前方に向けて設けられて直線状に光を発するとともにこの光の反射光を受光する光学センサと、
前記光学センサによる検出信号を用いて前記自走車両体の前方に存在する物体との距離を算出する測距部と、
前記測距部によって算出された距離情報に基づいて前記自走車両体の走行または操舵のうちの少なくとも一方を制御する自律走行制御部とを備え、
前記光学センサは、
前記上り路面と平行な仮想平面よりも下側に前記光を発する上向き角度で設けられていることを特徴とする自律走行車両装置。
【請求項4】
請求項3に記載した自律走行車両装置において、
前記光学センサは、
前記物体の高さの半分以上の高さ位置に設けられていることを特徴とする自律走行車両装置。
【請求項5】
請求項1または請求項3に記載した自律走行車両装置において、さらに、
前記光学センサを支持して前記自走車両体に取り付けるセンサ取付部材を備えることを特徴とする自律走行車両装置。
【請求項6】
請求項5に記載した自律走行車両装置において、
前記センサ取付部材は、
前記光学センサを支持するセンサ支持部分が前記自走車両体に取り付けられる車両取付部に対して屈曲した傾斜面に形成されていることを特徴とする自律走行車両装置。
【請求項7】
請求項5に記載した自律走行車両装置において、
前記センサ取付部材は、
前記光学センサの取り付け角度を調整可能であることを特徴とする自律走行車両装置。
【請求項8】
請求項1または請求項3に記載した自律走行車両装置において、さらに、
前記自走車両体の傾斜角度に応じた検出信号を出力する傾斜センサと、
前記傾斜センサが出力する前記検出信号に基づいて前記傾斜角度を算出する傾斜角度算出部と、
前記光学センサの取り付け角度を調整する角度調整機構と、
前記算出した傾斜角度を用いて前記角度調整機構を制御して前記光学センサの取り付け角度を調整する取付角度制御部を備えることを特徴とする自律走行車両装置。
【請求項9】
請求項1または請求項3に記載した自律走行車両装置において、
前記光学センサは、
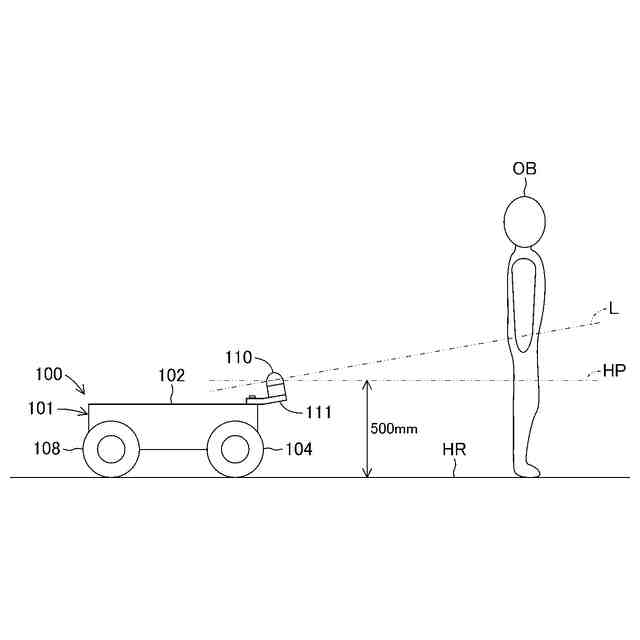
前記自走車両体の前方0.5m以上かつ5m以下の範囲における人の腰付近に前記光を照射する向きで設けられていることを特徴とする自律走行車両装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、進行方向上に存在する物体との接触または衝突を避けながら自律的に走行する自律走行車両装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来から、2次元LiDAR(Light Detection And Ranging)を用いて進行方向上に存在する障害物などの検知対象物を避けながら自律的に走行する自律走行車両装置がある。例えば、下記特許文献1には、2次元LiDARで構成された障害物センサを搭載して後進時における障害物との接触を避ける自律走行車両装置としてのフォークリフトが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-34408号公報
【0004】
しかしながら、上記特許文献1に記載されたフォークリフトにおいては、障害物センサが路面近くに配置されて路面と平行な水平方向にレーザ光を照射していると考えられるため、フォークリフトが傾斜した路面から水平な路面に移行する際に障害物の検知外れが生じる場合があるという問題がある。
【0005】
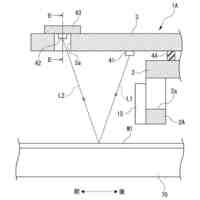
例えば、図12に示すように、2次元LiDARで構成された障害物センサ1を備えた自律走行車両装置2が下り傾斜となる下り路面DRを走行する場合においては、水平な水平路面HRに差し掛かった際に障害物センサ1から出射されるレーザ光Lが検知対象物OBとして検出すべき人から外れて水平路面HRに照射される。このため、自律走行車両装置2においては、検知対象物OBを正しく検出することができないばかりでなく、水平路面HRを検知対象物OBとして誤認してしまうことがあるという問題があった。
【0006】
なお、上記特許文献1に記載されたフォークリフトにおいては、床面上に載置されたパレットの形状を3次元的に測定するための2次元ライダーが床面にレーザ光を照射するように傾斜した状態で設けられている(図8)。しかしながら、上記特許文献1に記載された2次元ライダーは、水平な床面に載置されたパレットの3次元形状を測定してフォークを開口部に挿入する際に起動されるものであり、傾斜した路面上を走行する際に使用されるものではなく本願発明が想定する走行場面を全く想定していないものである。また、上記特許文献1に記載されたフォークリフトにおいては、パレットが傾斜した路面の前方に配置されることは全く想定されていないばかりでなく、仮に想定されていたとしても、例えば、上り傾斜となる上り路面の先の水平路面上に載置されたパレットについてはフォークリフトが上り路面を上りきる直前付近ではパレットが2次元ライダーの検出範囲から外れて3次元形状の測定が不可能である。
【0007】
本発明は上記問題に対処するためなされたもので、その目的は、傾斜した路面に対して屈曲して延びる後続路面に移行する際に障害物などの検知対象物の検知外れを抑制することができる自律走行車両装置を提供することにある。
【0008】
上記目的を達成するため、本発明の特徴は、水平面に対して下り傾斜となる下り路面に対して180°未満の角度範囲で屈曲して延びる下り後続路面を自走する自走車両体と、自走車両体の走行方向の前方に向けて設けられて直線状に光を発するとともにこの光の反射光を受光する光学センサと、光学センサによる検出信号を用いて自走車両体の前方に存在する物体との距離を算出する測距部と、測距部によって算出された距離情報に基づいて自走車両体の走行または操舵のうちの少なくとも一方を制御する自律走行制御部とを備え、光学センサは、下り路面と平行な仮想平面よりも上側に光を発する上向き角度で設けられていることにある。
【0009】
このように構成した本発明の特徴によれば、自律走行車両装置は、水平面に対して下り傾斜となる下り路面に対して180°未満の角度範囲で屈曲して延びる下り後続路面を自走する自走車両体に下り路面上で平行な仮想平面よりも上側に向けて光を発する対象物検知用の光学センサが設けられているため、下り路面から下り後続路面に移行する際に検知対象物の検知外れを抑制することができる。
【0010】
また、本発明の他の特徴は、前記自律走行車両装置において、光学センサは、物体の高さの半分以下の高さ位置に設けられていることにある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
村田機械株式会社
産業機械
7日前
株式会社ダイヘン
移動体
1か月前
神港テクノス株式会社
制御装置
1か月前
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
自律移動体
7日前
トヨタ自動車株式会社
配送システム
1か月前
株式会社クボタ
作業車
7日前
株式会社明電舎
車両
7日前
株式会社フジキン
流体制御装置
1か月前
アズビル株式会社
パラメータ調整装置
16日前
トヨタ自動車株式会社
ロボットシステム
15日前
トヨタ自動車株式会社
ロボットシステム
7日前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
キヤノン株式会社
情報処理装置
15日前
ローム株式会社
電源回路
1か月前
ローム株式会社
電源回路
1か月前
村田機械株式会社
搬送車システム
1か月前
旭精機工業株式会社
監視データ処理装置
1日前
東フロコーポレーション株式会社
流量制御装置
1か月前
トヨタ自動車株式会社
群制御システム及び方法
1か月前
株式会社ダイフク
情報表示システム
1か月前
ブラザー工業株式会社
数値制御装置及び工作機械
7日前
ローム株式会社
リニア電源
1か月前
ローム株式会社
リニア電源
1か月前
ローム株式会社
放電回路および電源システム
1か月前
株式会社日立製作所
移動体制御システム
1か月前
株式会社ディスコ
搬送車
15日前
ローム株式会社
定電圧生成回路
9日前
花王株式会社
物品の製造方法
1か月前
株式会社日立製作所
診断装置および診断方法
1か月前
ローム株式会社
定電圧生成回路
7日前
ローム株式会社
定電圧生成回路
1か月前
トヨタ自動車株式会社
制御装置
1か月前
株式会社リコー
移動体、プログラム、位置推定方法
16日前
トヨタ自動車株式会社
制御装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ