TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025003029
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103473
出願日
2023-06-23
発明の名称
動作検証装置、動作検証プログラム、および、動作検証方法
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
3/36 20060101AFI20241226BHJP(水工;基礎;土砂の移送)
要約
【課題】仮想空間において作業機械を作動させる際に、適切な出力音を決定する。
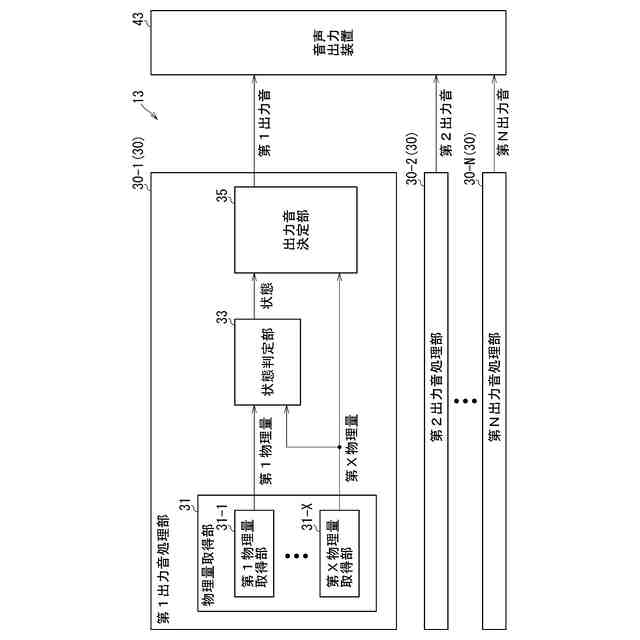
【解決手段】動作検証装置1は、作業機械60の作動を仮想空間において模擬する計算機13を備える。計算機13は、状態判定部33と、出力音決定部35と、を備える。状態判定部33は、仮想空間における、作業機械60および作業機械60の周囲の少なくともいずれかの状態を判定する。出力音決定部35は、状態判定部33が判定した状態に基づいて、出力音を決定する。
【選択図】図1
特許請求の範囲
【請求項1】
作業機械の作動を仮想空間において模擬する計算機を備え、
前記計算機は、
前記仮想空間における、前記作業機械および前記作業機械の周囲の少なくともいずれかの状態を判定する状態判定部と、
前記状態判定部が判定した状態に基づいて、出力音を決定する出力音決定部と、
を備える、
動作検証装置。
続きを表示(約 2,100 文字)
【請求項2】
請求項1に記載の動作検証装置であって、
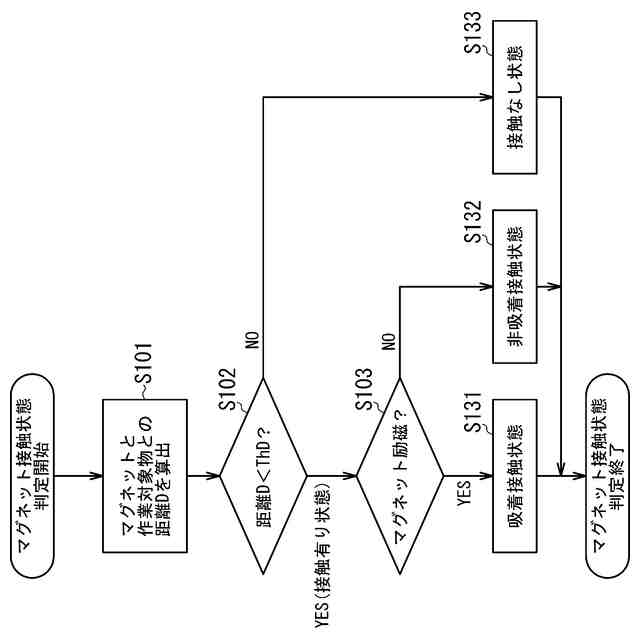
前記作業機械は、磁力により作業対象物を吸着するマグネットを備え、
前記状態判定部は、
前記作業対象物が、前記マグネットに磁力により吸着され、前記マグネットに接触する状態である吸着接触状態と、
前記作業対象物が、前記マグネットに磁力により吸着されることなく、前記マグネットに接触する状態である非吸着接触状態と、
前記作業対象物が、前記マグネットに接触しない状態である接触なし状態と、
のうち少なくとも2つの状態の、どの状態であるかを判定する、
動作検証装置。
【請求項3】
請求項1に記載の動作検証装置であって、
前記作業機械は、磁力により作業対象物を吸着するマグネットを備え、
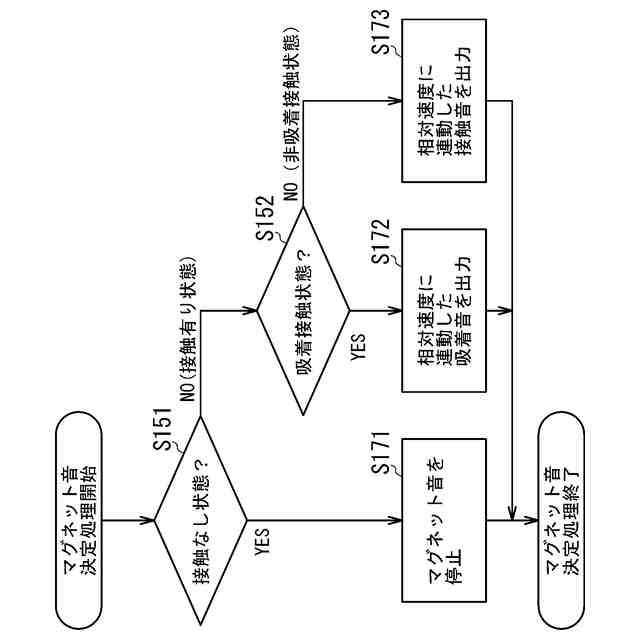
前記出力音決定部は、前記作業対象物が前記マグネットに接触すると前記状態判定部が判定した場合、
前記マグネットに接触する前記作業対象物の物理量と、
前記マグネットに接触する前記作業対象物の個数と、
の少なくともいずれかに基づいて、前記出力音を決定する、
動作検証装置。
【請求項4】
請求項1に記載の動作検証装置であって、
前記状態判定部は、
前記作業機械の駆動源であるエンジンが停止している状態であるエンジン停止中状態と、
前記エンジンが停止している状態から始動する状態に変化する状態であるエンジン始動状態と、
前記エンジンが連続的に作動している状態であるエンジン作動中状態と、
前記エンジンが作動している状態から停止する状態に変化する状態であるエンジン作動終了状態と、
のうち少なくとも2つの状態の、どの状態であるかを判定する、
動作検証装置。
【請求項5】
請求項1に記載の動作検証装置であって、
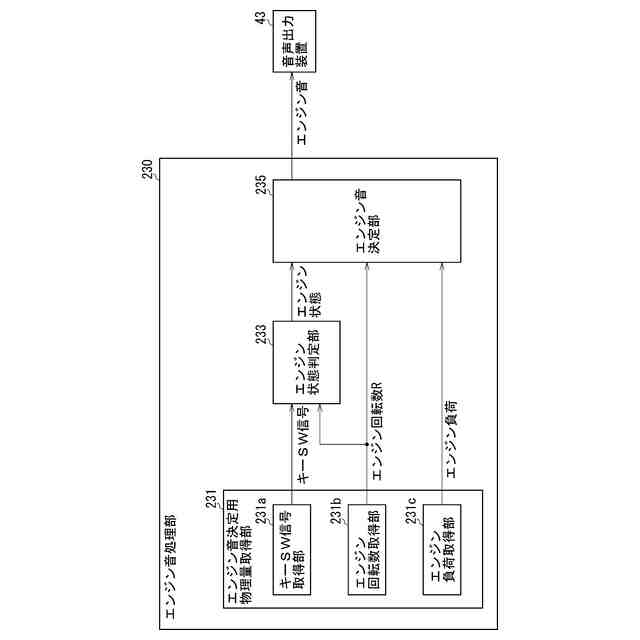
前記出力音決定部は、前記作業機械の駆動源であるエンジンが連続的に作動していると前記状態判定部が判定した場合、
前記エンジンの回転数と、
前記エンジンにかかる負荷と、
の少なくともいずれかに基づいて、前記出力音を決定する、
動作検証装置。
【請求項6】
請求項1に記載の動作検証装置であって、
前記状態判定部は、
作業を行うアタッチメントを作動させるシリンダの伸縮が停止している状態であるシリンダ停止中状態と、
前記シリンダが伸縮している状態であるシリンダ通常作動中状態と、
前記シリンダが伸縮可能な範囲の限界に達し、前記シリンダのシリンダチューブに前記シリンダのシリンダロッドが衝突する状態であるシリンダ衝突状態と、
前記シリンダが伸縮可能な範囲の限界近傍に達し、前記シリンダチューブと前記シリンダロッドとの衝突がクッション機構により緩衝される状態であるクッション機構作動中状態と、
のうち少なくとも2つの状態の、どの状態であるかを判定する、
動作検証装置。
【請求項7】
請求項1に記載の動作検証装置であって、
前記出力音決定部は、作業を行うアタッチメントを作動させるためのシリンダが伸縮していると前記状態判定部が判定した場合、前記シリンダの伸縮速度に基づいて、前記出力音を決定する、
動作検証装置。
【請求項8】
請求項1に記載の動作検証装置であって、
前記状態判定部は、
作業を行うアタッチメントの作動が停止している状態であるアタッチメント停止中状態と、
前記アタッチメントが作動している状態であるアタッチメント作動中状態と、
前記アタッチメントが可動範囲の限界位置に接近または到達している状態であるアタッチメント限界状態と、
のうち少なくとも2つの状態の、どの状態であるかを判定する、
動作検証装置。
【請求項9】
請求項1に記載の動作検証装置であって、
前記出力音決定部は、作業を行うアタッチメントが作動していると前記状態判定部が判定した場合、前記アタッチメントの作動速度に基づいて、前記出力音を決定する、
動作検証装置。
【請求項10】
請求項1に記載の動作検証装置であって、
前記作業機械は、
下部本体と、
前記下部本体に対して旋回する上部旋回体と、
を備え、
前記状態判定部は、
前記下部本体に対する前記上部旋回体の旋回が停止している状態である旋回停止中状態と、
前記下部本体に対する前記上部旋回体の旋回が加速している状態である旋回加速中状態と、
前記下部本体に対する前記上部旋回体の旋回が減速している状態である旋回減速中状態と、
前記下部本体に対して前記上部旋回体が定速旋回している状態である定速旋回中状態と、
のうち少なくとも2つの状態の、どの状態であるかを判定する、
動作検証装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の作動を仮想空間において模擬する、動作検証装置、動作検証プログラム、および、動作検証方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
例えば特許文献1に、実機の作業機械を遠隔操作する場合や実機の運転室から作業箇所が見えない場合でも、オペレータが作業状態を把握できるようにするための、音を生成する発明が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開平8-338047号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
仮想空間において作業機械を作動させる際に、適切な出力音を決定できることが望まれる。
【0005】
そこで、本発明は、仮想空間において作業機械を作動させる際に、適切な出力音を決定することができる、動作検証装置、動作検証プログラム、および、動作検証方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
動作検証装置は、作業機械の作動を仮想空間において模擬する計算機を備える。前記計算機は、状態判定部と、出力音決定部と、を備える。前記状態判定部は、前記仮想空間における、前記作業機械および前記作業機械の周囲の少なくともいずれかの状態を判定する。前記出力音決定部は、前記状態判定部が判定した状態に基づいて、出力音を決定する。
【0007】
動作検証プログラムは、作業機械の作動を仮想空間において模擬するためのプログラムである。動作検証プログラムは、状態判定ステップと、出力音決定ステップと、を計算機に実行させる。前記状態判定ステップは、前記仮想空間における、前記作業機械および前記作業機械の周囲の少なくともいずれかの状態を判定する。前記出力音決定ステップは、前記状態判定ステップが判定した状態に基づいて、出力音を決定する。
【0008】
動作検証方法は、作業機械の作動を仮想空間において模擬するための方法である。動作検証方法は、状態判定ステップと、出力音決定ステップと、を備える。前記状態判定ステップは、前記仮想空間における、前記作業機械および前記作業機械の周囲の少なくともいずれかの状態を判定する。前記出力音決定ステップは、前記状態判定ステップが判定した状態に基づいて、出力音を決定する。
【発明の効果】
【0009】
上記の動作検証装置、動作検証プログラム、および、動作検証方法のそれぞれにより、仮想空間において作業機械を作動させる際に、適切な出力音を決定することができる。
【図面の簡単な説明】
【0010】
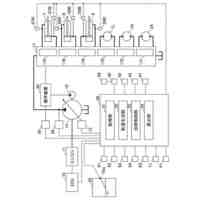
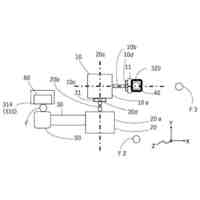
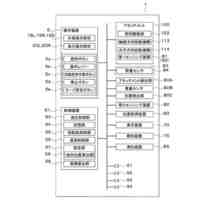
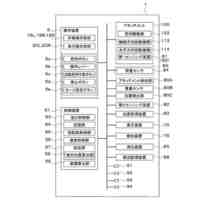
動作検証装置1のブロック図である。
図1に示す出力音処理部30のブロック図である。
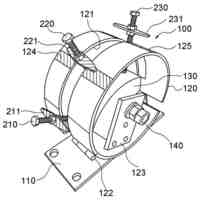
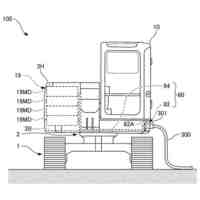
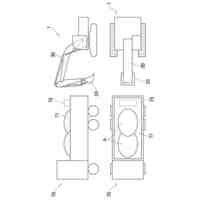
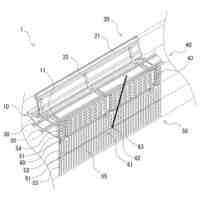
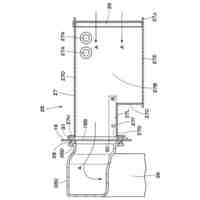
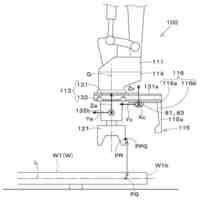
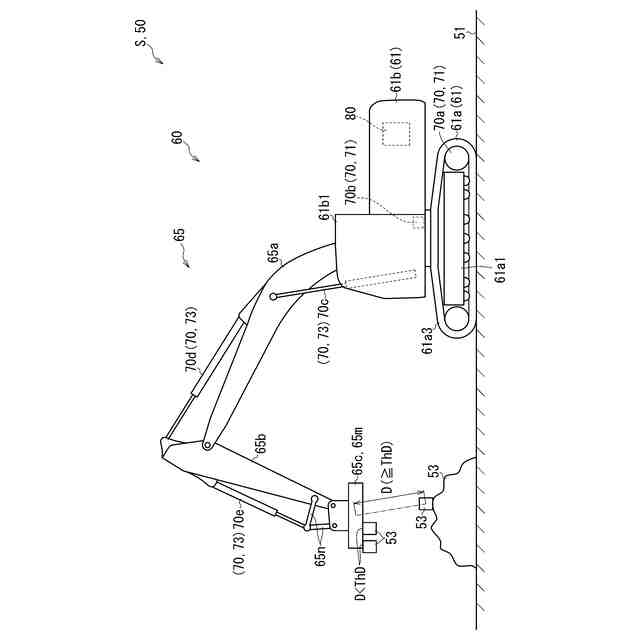
図1に示す計算機13が計算する仮想空間における、マグネット65mを備える作業機械60を示す図である。
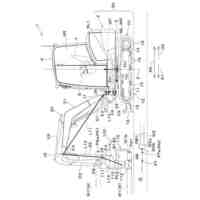
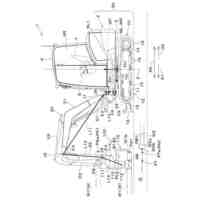
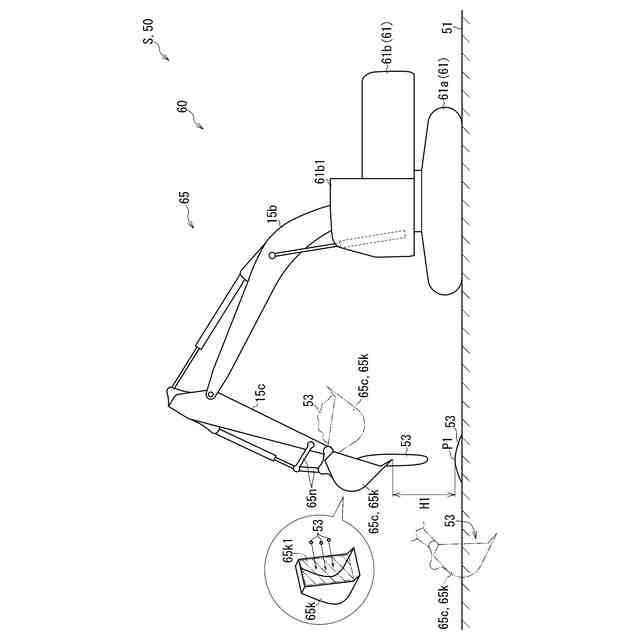
図3に示す計算機13が計算する仮想空間における、バケット65kを備える作業機械60を示す図である。
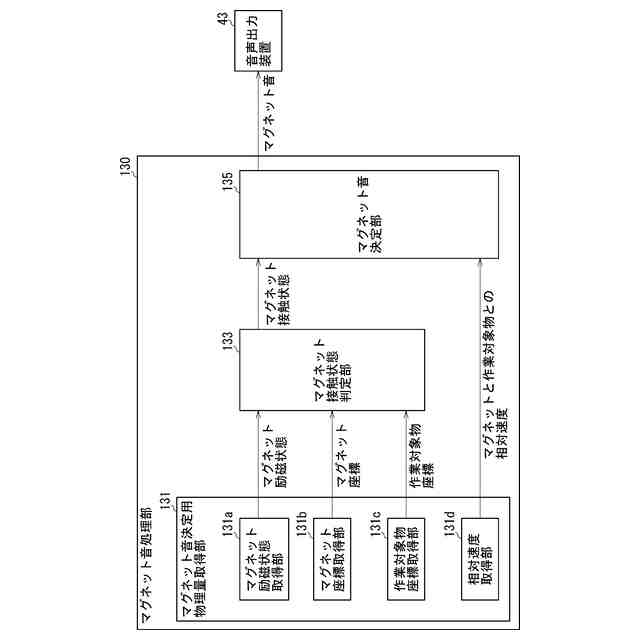
図2に示す出力音処理部30の一例であるマグネット音処理部130のブロック図である。
図5に示すマグネット接触状態判定部133の処理のフローチャートである。
図5に示すマグネット音決定部135の処理のフローチャートである。
図2に示す出力音処理部30の一例であるエンジン音処理部230のブロック図である。
図8に示すエンジン状態判定部233の処理のフローチャートである。
図5に示すエンジン音決定部235の処理のフローチャートである。
図2に示す出力音処理部30の一例であるアタッチメント音処理部330のブロック図である。
図11に示すアタッチメント状態判定部333の処理のフローチャートである。
図11に示すアタッチメント音決定部335の処理のフローチャートである。
図2に示す出力音処理部30の一例である旋回音処理部430のブロック図である。
図14に示す旋回状態判定部433の処理のフローチャートである。
図14に示す旋回音決定部435の処理のフローチャートである。
図2に示す出力音処理部30の一例である走行音処理部530のブロック図である。
図17に示す走行状態判定部533の処理のフローチャートである。
図17に示す走行音決定部535の処理のフローチャートである。
図2に示す出力音処理部30の一例である解放音処理部630のブロック図である。
図20に示す解放状態判定部633の処理のフローチャートである。
図20に示す解放音決定部635の処理のフローチャートである。
図2に示す出力音処理部30の一例である掘削音処理部730のブロック図である。
図23に示す掘削状態判定部733の処理のフローチャートである。
図23に示す掘削音決定部735の処理のフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
エア津波緩衝装置
1か月前
個人
指示装置
1か月前
株式会社クボタケミックス
桝蓋
1か月前
株式会社不二越
建設機械
1か月前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
ショベル
28日前
株式会社ジェック
水流方向切替装置
今日
コベルコ建機株式会社
作業機械
1か月前
住友重機械工業株式会社
作業機械
7日前
住友重機械工業株式会社
作業機械
1か月前
個人
鋼管杭とその製造方法
1か月前
鹿島建設株式会社
建込み方法
20日前
株式会社フジタ
建築物とその施工方法
1か月前
コベルコ建機株式会社
作業機械
1か月前
コベルコ建機株式会社
作業機械
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
住友重機械工業株式会社
作業機械の制御装置
1か月前
ジーネットワーク株式会社
低空頭FRP.Tube合成杭
29日前
個人
アンカーボルト支持装置
29日前
スーパーレジンクラフト株式会社
防塵板付消波装置
28日前
日鉄建材株式会社
透過型砂防堰堤の設計方法
今日
日立建機株式会社
作業車両
22日前
三陽機器株式会社
作業機の作業部連結構造
22日前
株式会社竹中工務店
山留め工法
1か月前
株式会社日立建機ティエラ
建設機械
今日
株式会社竹中工務店
山留め工法
1か月前
清水建設株式会社
道路に対する液状化対策構造
1か月前
日特建設株式会社
基盤材処理システム
1か月前
ニシオホールディングス株式会社
作業機械用操作装置
1か月前
ジャパンパイル株式会社
回転埋設杭
29日前
小岩金網株式会社
布団篭の本体パネル及び布団篭
1か月前
株式会社クボタ
作業機および作業機の制御方法
6日前
株式会社クボタ
作業機および作業機の制御方法
6日前
株式会社クボタ
作業機および作業機の制御方法
6日前
株式会社クボタ
作業機および作業機の制御方法
6日前
株式会社クボタ
作業機および作業機の制御方法
6日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ